PID控制算法的简单分析和仿真!
PID算法简单剖析如下:
1、首先我们来看一下PID系统的基本组成模块:
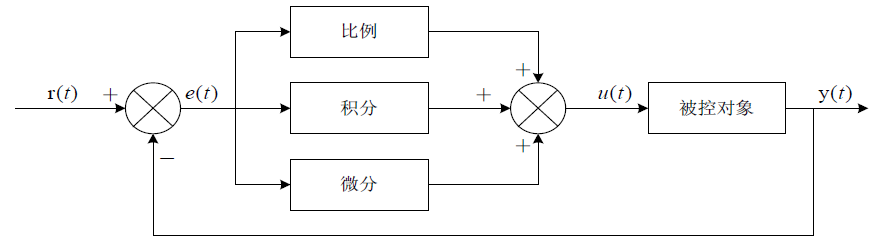
如图所示,图中相关参数的表示如下:
r(t):系统实际上需要的输出值,这是一个标准值,在我们设定了之后让这个系统去逼近的一个值(随时间变化的原因是,我们对系统的需求不同才会改变!)
y(t):系统当前的输出值,这个值应该需要趋近于我们设定的值,当我们没有增加PID控制模块之前,它是由被控对象通过r(t)输入直接产生的。
e(t):系统由于某些扰动,导致的系统产生的偏差,实际输出的值和想要设定的初始值r(t)的差值。
u(t):系统通过PID控制器输出的新的输入值,实际上他是在r(t)的基础上,针对当前的实际情况做出的改变。
Kp比例模块:系统PID比例因子,Kp能够对于产生的偏差e(t)能够迅速的作出反应,减少偏差。
Ki积分模块:系统PID积分因子,Ki能够用于消除静差,由于前面的误差有正有负,所以当前偏差的加入能够抵消部分,保持系统的稳定性,让系统有记忆功能。
Kd微分模块:系统微分因子,Kd能够体现出当前误差的变化趋势,引入有效早期修正信号,从而加快系统的动作速度,减少调节时间。
图中所示的信号关系公式如下所示:
信号误差公式:
模拟信号的PID控制器公式: 
离散信号的PID控制器公式:
被控对象的信号公式: (简单的线性系统,比如电机的PWM调速系统)
(简单的线性系统,比如电机的PWM调速系统)
上述公式参数描述:
Kp控制器比例系数、Ti控制器积分时间(积分系数)、Td控制器微分时间(微分系数)
k采样序列号,k=0,1,2,3...、Uk第k次采样时刻系统输出值、ek第k次采样时刻偏差值、ek-1第k-1次采样时刻偏差值、Ki=Kp*T/Ti、Kd=Kp*Td/T
2、离散信号的PID控制器算法仿真:
1、位置式PID算法:

PID系统产生的值,完全作为系统的输入参数,即采用u(k)代替了r(k),如果计算机出现故障时,位置式PID控制将导致Uk的剧烈变化,这会引起执行机构的大幅度变化,造成巨大损失。
仿真代码如下(python):
import matplotlib.pyplot as plt
import numpy as np
import random
import sys
import os time_length = 600
time_sample = 100
time_interval = float(time_length/time_sample)
error_coeff = 3
t = np.linspace(0,time_length,time_sample)
Slope = 1
Intercept = 0
standard_in = 20 # The system model
system_model = lambda i : Slope*i + Intercept
standard_out = system_model(standard_in)
print("The Standard Output:%d" % standard_out) Kp = 0.08 # average
Ki = -0.7 # intergre
Kd = 0.01 # diff error_bef = []
real_out_ajust = []
real_out_ajust.append(70)
real_out_ajust.append(75)
error_bef.append(real_out_ajust[0]-standard_out)
Out_plt = np.linspace(standard_out,standard_out,time_sample) # 标准直接计算公式1:Pout=Kp*e(t) + Ki*Sum[e(t)] + Kd*[e(t) - e(t-1)]
def PID_Controller_Direct_Mem(standard_out,t):
global time_sample,Kp,Ki,Kd,error_bef,real_out_ajust
if t > time_sample:
print("Time Out! Quit!")
return -1
error_now = real_out_ajust[t] - standard_out
error_bef.append(error_now) # 记录了所有的误差
integrate_res = np.sum(error_bef)
Diffirent_res = error_now - error_bef[t-1]
return Kp*error_now + Ki*integrate_res + Kd*Diffirent_res for t_slice in range(1,time_sample-1):
Pout = PID_Controller_Direct_Mem(standard_out,t_slice)
real_out_ajust.append(system_model(Pout)) plt.figure('PID_Controller_Direct_Mem')
plt.xlim(0,time_length)
plt.ylim(0,2*standard_out)
plt.plot(t,real_out_ajust)
plt.plot(t,Out_plt)
仿真结果如下所示:
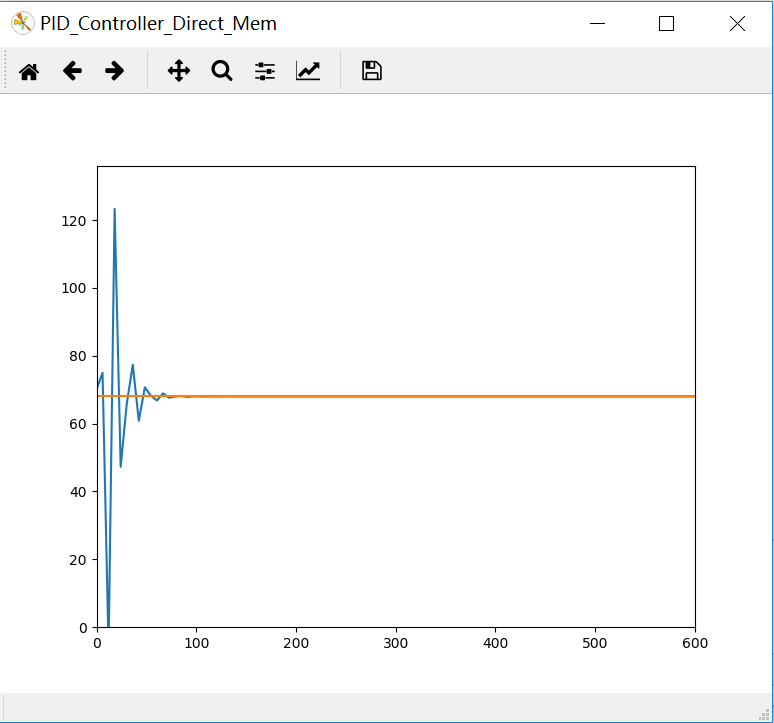 图中所示,系统最终收敛于我们设定的红线的位置r(t)
图中所示,系统最终收敛于我们设定的红线的位置r(t)
2、增量式PID算法:

当执行机构需要的控制量是增量而不是位置量的绝对数值是,可以采用增量式PID控制算法。
代码如下(python):
import matplotlib.pyplot as plt
import numpy as np
import random
import sys
import os class PID_Prama:
def __init__(self):
self.Kp = 0
self.Ki = 0
self.Kd = 0
self.set_val = 0
self.error_last = 0
self.error_prev = 0
self.error_sum = 0 # 增量计算公式:
# Pout=Kp*[e(t) - e(t-1)] + Ki*e(t) + Kd*[e(t) - 2*e(t-1) +e(t-2)]
def PID_Controller_Increa(pid,out_now):
error = pid.set_val - out_now
Res = pid.Kp*(error-pid.error_last) + pid.Ki*error + \
pid.Kd*(error-2*pid.error_last+pid.error_prev)
pid.error_prev = pid.error_last
pid.error_last = error
return Res standard_out = 100
PID_val = PID_Prama() # PID参数
PID_val.Kp = 0.01
PID_val.Ki = 0.1
PID_val.Kd = 0.05
PID_val.set_val = standard_out # 标准输出值
# 增量型PID控制器输出值
PID_Controller_Increa_Out = []
Sys_In = []
# 0时刻系统输入值
Sys_In.append(5)
# 系统响应函数
SystemFunc = lambda x : 5*x + np.random.normal(0,0.5,1)[0] Sys_Out = []
# 0时刻系统输出值
Sys_Out.append(SystemFunc(Sys_In[0])) for t_slice in range(Time):
Diff = PID_Controller_Increa(PID_val,Sys_Out[t_slice]) #系统误差
PID_Controller_Increa_Out.append(Diff) # 记录所有的系统误差
Sys_In.append(Sys_In[0]+np.sum(PID_Controller_Increa_Out)) # 计算增量之后的新的系统输入
Sys_Out.append(SystemFunc(Sys_In[t_slice+1])) # 计算下一时刻系统新的输出值 standard = np.linspace(PID_val.set_val,PID_val.set_val,Time) plt.figure('PID_Controller_Increa')
plt.xlim(0,Time)
plt.ylim(0,2*standard_out)
plt.plot(Sys_Out)
plt.plot(standard) plt.show()
这里对增量式PID算法进行深入的分析和计算:
No1:class PID_Param类保存了PID算法中的三个参数,Kp Ki Kd,同时类当中也记录了上一次系统存在的误差error_last,以及上上一次系统的误差error_prev,这样就能够完成增量式误差的公式计算。
No2:上述算法中在循环体中记录了所有的误差变量PID_Controller_Increa_Out,这是为了仿真的目的,实际上我们比不需要存储所有的误差参数。
No3:系统的响应system_model: ,系统后面添加了高斯噪声,这表示了系统在运行过程中的不稳定的过程,同时系统本身是一个线性系统,例如控制电机转速的系统:PWM--ctl--Speed
,系统后面添加了高斯噪声,这表示了系统在运行过程中的不稳定的过程,同时系统本身是一个线性系统,例如控制电机转速的系统:PWM--ctl--Speed
系统仿真结果:
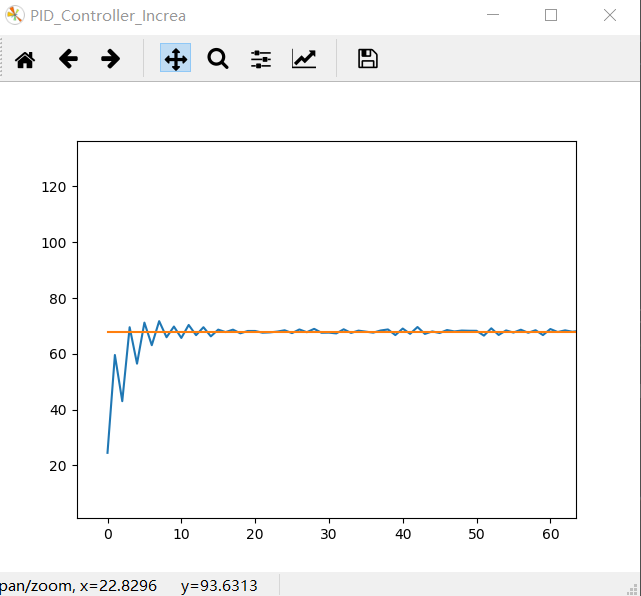
其他的相关参考资料见我的cnblog文件中,下一篇介绍PID实战,基于STM32微控制器的C语言控制PWM电机力矩调节系统!
https://www.cnblogs.com/uestc-mm/p/10513131.html
PID控制算法的简单分析和仿真!的更多相关文章
- PID控制算法的C语言实现
参考: PID控制器开发笔 浅谈位置式PID 专家PID控制在快速系统中的仿真及应用(这篇了论文介绍的积分分离PID.专家PID(脚本实现和simulink实现)很详细) PID控制算法的C语言实现一 ...
- PID控制算法的C语言实现十 专家PID与模糊PID的C语言实现
本节是PID控制算法的C语言实现系列的最后一节,前面8节中,已经分别从PID的实现到深入的过程进行了一个简要的讲解,从前面的讲解中不难看出,PID的控制思想非常简单,其主要问题点和难点在于比例.积分. ...
- [转]PID控制算法原理
PID控制算法是工业界使用极其广泛的一个负反馈算法,相信这个算法在做系统软件时也有用武之处,这里摘录了知乎上的一篇文章,后面学习更多后自己总结一篇 以下为原文: PID控制应该算是应用非常广泛的控制算 ...
- PID控制算法的C语言实现十一 模糊算法简介
在PID控制算法的C语言实现九中,文章已经对模糊PID的实质做了一个简要说明.本来打算等到完成毕业设计,工作稳定了再着力完成剩下的部分.鉴于网友的要求和信任,抽出时间来,对模糊PID做一个较为详细的论 ...
- x264源代码简单分析:概述
===================================================== H.264源代码分析文章列表: [编码 - x264] x264源代码简单分析:概述 x26 ...
- FFmpeg源代码简单分析:av_find_decoder()和av_find_encoder()
===================================================== FFmpeg的库函数源代码分析文章列表: [架构图] FFmpeg源代码结构图 - 解码 F ...
- PID控制算法
PID控制算法 四轴如何起飞的原理 四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了. 四轴飞行器飞行过程中如何保持水平: 我们先假设一种理想状况:四个电 ...
- PID控制算法的C语言实现一 PID算法原理
本系列是转载............. 全部的程序有一个共同点:就是我没认真去调pid的参数 在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设 ...
- 杂谈PID控制算法——第二篇:调·三个量
上面一篇文章讲了一下PID算法中的三个常量大致的在PID算法中起的一个作用,但在实际的使用中,究竟应该如何调节(或者用更加专业的话说是整定)PID控制算法的三个.首先可以将KP,KI,KD三个常量全部 ...
随机推荐
- mysql如何直接查出从1开始递增的数
比如我的一个sql语句 SELECT nick_name FROM t_user ; 得到的结果是:张三李四王五 而现在我想要的结果是:1 张三2 李四3 王五 应该如何写sql呀? 答案就是用 @r ...
- Wannafly Union#1
题目链接:http://vjudge.net/contest/142053#overview A.题意:有一个3*n的隧道,人和车轮流走,人先向右走一步,然后选在是在原地不动还是上下移动一格,之后车开 ...
- Markdown初入门(使用Typora编辑)
标题 使用#来实现标题的大小控制 # h1 标题1 ## h2 标题2 ### h3 标题3 #### h4 标题4 ##### h5 标题5 ###### h6 标题6 标题一 标题二 标题三 标题 ...
- POJ--3974 Palindrome(回文串,hash)
链接:点击这里 #include<iostream> #include<algorithm> #include<stdio.h> #include<cstri ...
- 网页换肤,模块换肤,jQuery的Cookie插件使用(转)
具体效果如下: 第一次加载如下图: 然后点击天蓝色按钮换成天蓝色皮肤如下图: 然后关闭网页重新打开或者在打开另一个网页如下图: 因为皮肤用Cookie保存了下来,所以不会重置 具体的实现代码如下: & ...
- (二叉树 DFS 递归) leetcode 101. Symmetric Tree
Given a binary tree, check whether it is a mirror of itself (ie, symmetric around its center). For e ...
- SpringBoot系列: 设计Restful风格的API
RESTful 架构REST 并非一种技术或规范, 而是一种架构风格, 如果一个架构符合Rest的约束条件和原则, 就可以称作是 RESTful 架构. REST全称是Representational ...
- 使用kqueue的str_cli函数
void str_cli(FILE *fp, int sockfd) { , isfile; char buf[MAXLINE]; ]; struct timespec ts; struct stat ...
- topshelf 服务启动运行
topshlf 服务启动运行方式 安装:servicename.exe install 启动:servicename.exe start 卸载:servicename.exe uninstall
- day 14 - 2 生成器练习
相关练习 1.处理文件,用户指定要查找的文件和内容,将文件中包含要查找内容的每一行都输出到屏幕 #比较 low 的方法 def check_file(filename,aim): with open( ...