9.深入k8s:调度器及其源码分析
转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com
源码版本是1.19
这次讲解的是k8s的调度器部分的代码,相对来说比较复杂,慢慢的梳理清楚逻辑花费了不少的时间,不过在梳理过程中也对k8s有了一个更深刻的理解。

调度的逻辑介绍
调度器的主要职责,就是为一个新创建出来的 Pod,寻找一个最合适的节点(Node)。kube-scheduler 就是 Kubernetes 集群的默认调度器。
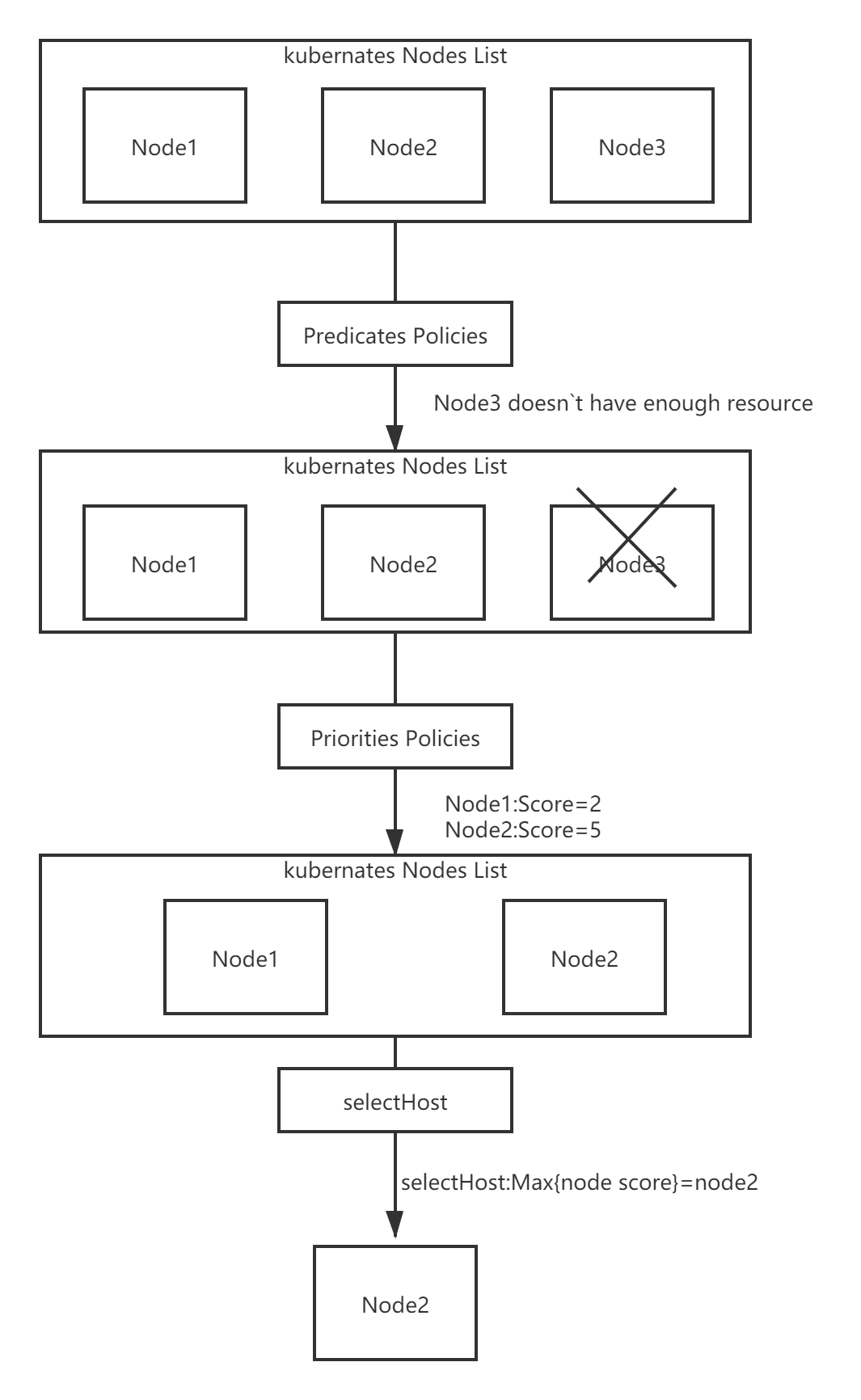
默认调度器会首先调用一组Filter过滤器,也就是使用相应的Predicates的调度算法来进行过滤。然后,再调用一组叫作 Priority 的调度算法,来给上一步得到的结果里的每个 Node 打分,然后根据打分来对Node进行排序,找出最优节点,如果多个节点都有最高的优先级分数,那么则循环分配,确保平均分配给pod。
调度算法执行完成后,调度器就需要将 Pod 对象的 nodeName 字段的值,修改为上述 Node 的名字。
Filter过滤器的作用主要是从当前集群的所有节点中,“过滤”出一系列符合条件的节点,有如下几种调度策略:
GeneralPredicates
这一组过滤规则,负责的是最基础的调度策略。比如,计算宿主机的 CPU 和内存资源等是否够用; ,等等。
Volume过滤规则
这一组过滤规则,负责的是跟容器持久化 Volume 相关的调度策略。如:检查多个 Pod 声明挂载的持久化 Volume 是否有冲突;检查一个节点上某种类型的持久化 Volume 是不是已经超过了一定数目;检查Pod 对应的 PV 的 nodeAffinity 字段,是否跟某个节点的标签相匹配等等。
检查调度 Pod 是否满足 Node 本身的某些条件
如PodToleratesNodeTaints负责检查的就是我们前面经常用到的 Node 的“污点”机制。NodeMemoryPressurePredicate,检查的是当前节点的内存是不是已经不够充足。
检查亲密与反亲密关系
检查待调度 Pod 与 Node 上的已有 Pod 之间的亲密(affinity)和反亲密(anti-affinity)关系。
在调用Filter过滤器的时候需要关注整个集群的信息,Kubernetes 调度器会在为每个待调度 Pod 执行该调度算法之前,先将算法需要的集群信息初步计算一遍,然后缓存起来。这样也可以加快执行速度。
而Priorities里的打分规则包含如:空闲资源(CPU 和 Memory)多的宿主机可以得高权重;CPU和Memory使用都比较均衡则可以得高权重;为了避免这个算法引发调度堆叠如果大镜像分布的节点数目很少,那么这些节点的权重就会被调低等。
整个的流程图如下:
源码分析
整个调度过程如流程图:
实例化Scheduler对象
代码路径:pkg/scheduler/scheduler.go
Scheduler对象是运行kube-scheduler组件的主对象,所以kube-scheduler会在运行的时候创建一个scheduler对象:
sched, err := scheduler.New(...)
调用的scheduler的New方法,这个方法会实例化scheduler对象并返回。
在创建scheduler实例的时候会根据Schedule rAlgorithm Source来实例化调度算法函数:
代码路径:pkg/scheduler/apis/config/types.go
type SchedulerAlgorithmSource struct {
Policy *SchedulerPolicySource
Provider *string
}
Policy是通过参数--policy-config-file参数指定调度策略文件来定义策略。
Providre是通用调度器,是kube-scheduler默认调度方式。
然后会根据设置的策略来创建不同的scheduler:
func New(...) (*Scheduler, error) {
...
case source.Provider != nil:
sc, err := configurator.createFromProvider(*source.Provider)
...
case source.Policy != nil:
...
sc, err := configurator.createFromConfig(*policy)
...
}
createFromProvider方法里面设置好Filter和Score,也就是过滤策略和打分策略:
代码路径:pkg/scheduler/algorithmprovider/registry.go
func getDefaultConfig() *schedulerapi.Plugins {
return &schedulerapi.Plugins{
...
Filter: &schedulerapi.PluginSet{
Enabled: []schedulerapi.Plugin{
{Name: nodeunschedulable.Name},
{Name: noderesources.FitName},
{Name: nodename.Name},
{Name: nodeports.Name},
{Name: nodeaffinity.Name},
{Name: volumerestrictions.Name},
{Name: tainttoleration.Name},
{Name: nodevolumelimits.EBSName},
{Name: nodevolumelimits.GCEPDName},
{Name: nodevolumelimits.CSIName},
{Name: nodevolumelimits.AzureDiskName},
{Name: volumebinding.Name},
{Name: volumezone.Name},
{Name: podtopologyspread.Name},
{Name: interpodaffinity.Name},
},
},
...
Score: &schedulerapi.PluginSet{
Enabled: []schedulerapi.Plugin{
{Name: noderesources.BalancedAllocationName, Weight: 1},
{Name: imagelocality.Name, Weight: 1},
{Name: interpodaffinity.Name, Weight: 1},
{Name: noderesources.LeastAllocatedName, Weight: 1},
{Name: nodeaffinity.Name, Weight: 1},
{Name: nodepreferavoidpods.Name, Weight: 10000},
// Weight is doubled because:
// - This is a score coming from user preference.
// - It makes its signal comparable to NodeResourcesLeastAllocated.
{Name: podtopologyspread.Name, Weight: 2},
{Name: tainttoleration.Name, Weight: 1},
},
},
...
}
}
最后kube-scheduler处理完一系列的逻辑,最后会调用到Scheduler的run方法:
func (sched *Scheduler) Run(ctx context.Context) {
if !cache.WaitForCacheSync(ctx.Done(), sched.scheduledPodsHasSynced) {
return
}
sched.SchedulingQueue.Run()
wait.UntilWithContext(ctx, sched.scheduleOne, 0)
sched.SchedulingQueue.Close()
}
调度主逻辑
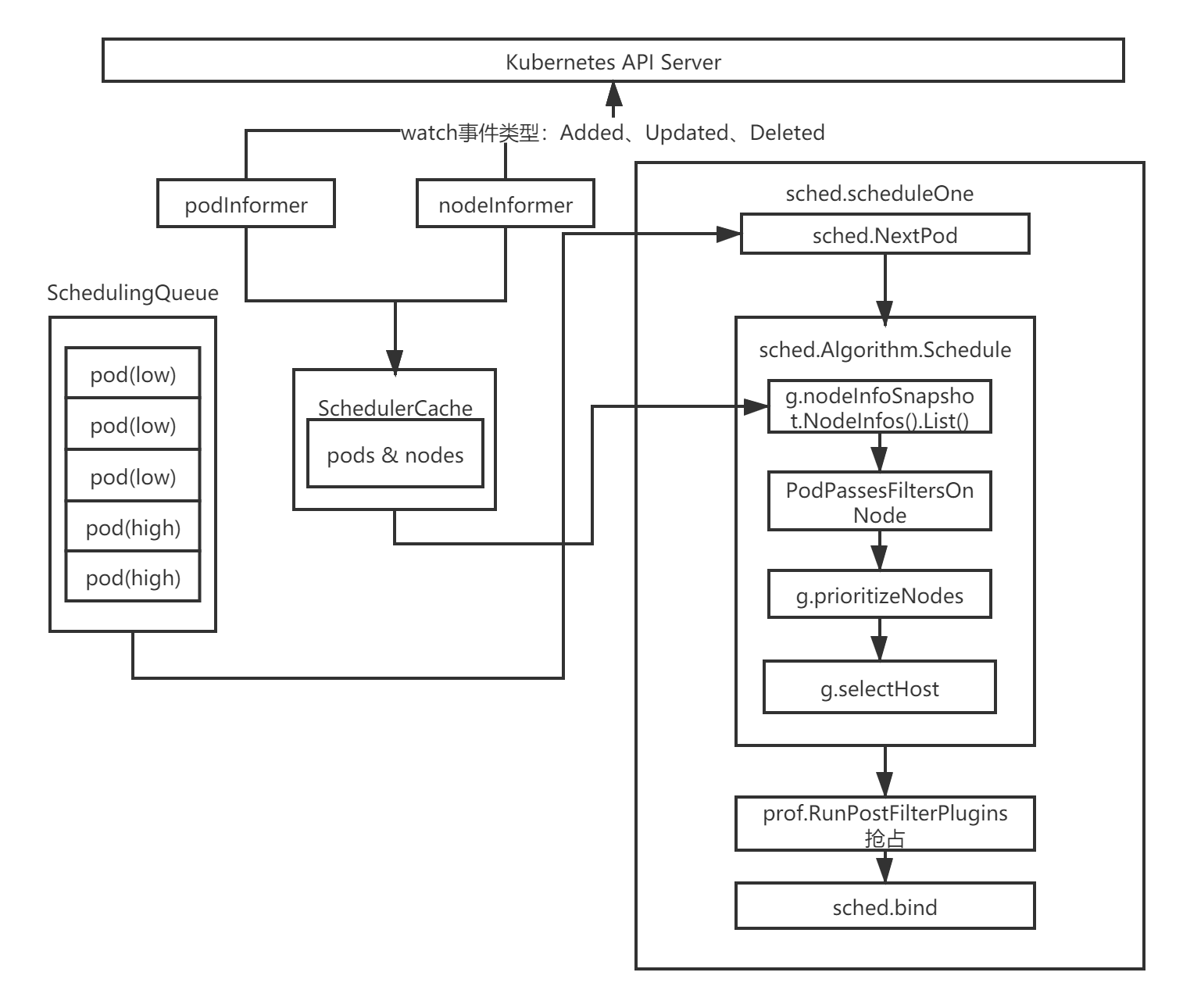
sched.scheduleOne会被wait.UntilWithContext定时调用,直到ctx.Done()返回true为止。sched.scheduleOne是核心实现,主要做了以下几件事:
- 通过sched.NextPod()函数从优先队列中获取一个优先级最高的待调度Pod资源对象,如果没有获取到,那么该方法会阻塞住;
- 通过sched.Algorithm.Schedule调度函数执行Predicates的调度算法与Priorities算法,挑选出一个合适的节点;
- 当没有找到合适的节点时,调度器会尝试调用prof.RunPostFilterPlugins抢占低优先级的Pod资源对象的节点;
- 当调度器为Pod资源对象选择了一个合适的节点时,通过sched.bind函数将合适的节点与Pod资源对象绑定在一起;
下面我们直接看一下sched.Algorithm.Schedule方法的实现:
代码路径:pkg/scheduler/core/generic_scheduler.go
//将pod调度到某一node上,如果成功则返回node的名称,如果成功则返回失败信息
func (g *genericScheduler) Schedule(ctx context.Context, prof *profile.Profile, state *framework.CycleState, pod *v1.Pod) (result ScheduleResult, err error) {
trace := utiltrace.New("Scheduling", utiltrace.Field{Key: "namespace", Value: pod.Namespace}, utiltrace.Field{Key: "name", Value: pod.Name})
defer trace.LogIfLong(100 * time.Millisecond)
//检查pod上声明的pvc,包括pvc是否存在,是否已被删除等
if err := podPassesBasicChecks(pod, g.pvcLister); err != nil {
return result, err
}
trace.Step("Basic checks done")
if err := g.snapshot(); err != nil {
return result, err
}
trace.Step("Snapshotting scheduler cache and node infos done")
if g.nodeInfoSnapshot.NumNodes() == 0 {
return result, ErrNoNodesAvailable
}
startPredicateEvalTime := time.Now()
//这里是Predicates部分的逻辑,负责选出一系列符合条件的节点
feasibleNodes, filteredNodesStatuses, err := g.findNodesThatFitPod(ctx, prof, state, pod)
if err != nil {
return result, err
}
trace.Step("Computing predicates done")
//表示没有 找到合适的节点
if len(feasibleNodes) == 0 {
return result, &FitError{
Pod: pod,
NumAllNodes: g.nodeInfoSnapshot.NumNodes(),
FilteredNodesStatuses: filteredNodesStatuses,
}
}
metrics.DeprecatedSchedulingAlgorithmPredicateEvaluationSecondsDuration.Observe(metrics.SinceInSeconds(startPredicateEvalTime))
metrics.DeprecatedSchedulingDuration.WithLabelValues(metrics.PredicateEvaluation).Observe(metrics.SinceInSeconds(startPredicateEvalTime))
startPriorityEvalTime := time.Now()
// When only one node after predicate, just use it.
//找到唯一的node节点,并返回
if len(feasibleNodes) == 1 {
metrics.DeprecatedSchedulingAlgorithmPriorityEvaluationSecondsDuration.Observe(metrics.SinceInSeconds(startPriorityEvalTime))
return ScheduleResult{
SuggestedHost: feasibleNodes[0].Name,
EvaluatedNodes: 1 + len(filteredNodesStatuses),
FeasibleNodes: 1,
}, nil
}
//如果节点不是唯一,那么需要进行打分排序
priorityList, err := g.prioritizeNodes(ctx, prof, state, pod, feasibleNodes)
if err != nil {
return result, err
}
metrics.DeprecatedSchedulingAlgorithmPriorityEvaluationSecondsDuration.Observe(metrics.SinceInSeconds(startPriorityEvalTime))
metrics.DeprecatedSchedulingDuration.WithLabelValues(metrics.PriorityEvaluation).Observe(metrics.SinceInSeconds(startPriorityEvalTime))
//选择最佳的节点
host, err := g.selectHost(priorityList)
trace.Step("Prioritizing done")
return ScheduleResult{
SuggestedHost: host,
EvaluatedNodes: len(feasibleNodes) + len(filteredNodesStatuses),
FeasibleNodes: len(feasibleNodes),
}, err
}
这个方法逻辑还是比较清晰的,总共分为如下几部分:
- 对pod进行校验,检查是否声明了pvc,以及对应的pvc是否已经被删除等;
- 调用findNodesThatFitPod方法,负责选出一系列符合条件的节点;
- 如果没有找到节点或唯一节点,那么直接返回;
- 如果找到的节点数超过1,那么需要调用prioritizeNodes方法,进行打分排序;
- 最后调用selectHost选出合适的唯一节点,并返回。
Filter过滤筛选节点
下面我们看看findNodesThatFitPod时如何实现筛选过滤的。
代码位置:pkg/scheduler/core/generic_scheduler.go
func (g *genericScheduler) findNodesThatFitPod(ctx context.Context, prof *profile.Profile, state *framework.CycleState, pod *v1.Pod) ([]*v1.Node, framework.NodeToStatusMap, error) {
filteredNodesStatuses := make(framework.NodeToStatusMap)
//前置过滤插件用于预处理 Pod 的相关信息,或者检查集群或 Pod 必须满足的某些条件。
//如果 PreFilter 插件返回错误,则调度周期将终止
s := prof.RunPreFilterPlugins(ctx, state, pod)
if !s.IsSuccess() {
if !s.IsUnschedulable() {
return nil, nil, s.AsError()
}
// All nodes will have the same status. Some non trivial refactoring is
// needed to avoid this copy.
allNodes, err := g.nodeInfoSnapshot.NodeInfos().List()
if err != nil {
return nil, nil, err
}
for _, n := range allNodes {
filteredNodesStatuses[n.Node().Name] = s
}
return nil, filteredNodesStatuses, nil
}
//过滤掉不符合条件的node
feasibleNodes, err := g.findNodesThatPassFilters(ctx, prof, state, pod, filteredNodesStatuses)
if err != nil {
return nil, nil, err
}
//SchdulerExtender是kubernets外部扩展方式,用户可以根据需求独立构建调度服务
feasibleNodes, err = g.findNodesThatPassExtenders(pod, feasibleNodes, filteredNodesStatuses)
if err != nil {
return nil, nil, err
}
return feasibleNodes, filteredNodesStatuses, nil
}
这个方法首先会通过前置过滤器来校验pod是否符合条件,然后调用findNodesThatPassFilters方法过滤掉不符合条件的node。findNodesThatPassExtenders是kubernets留给用户的外部扩展方式,暂且不表。
下面我们接着看findNodesThatPassFilters方法:
func (g *genericScheduler) findNodesThatPassFilters(ctx context.Context, prof *profile.Profile, state *framework.CycleState, pod *v1.Pod, statuses framework.NodeToStatusMap) ([]*v1.Node, error) {
allNodes, err := g.nodeInfoSnapshot.NodeInfos().List()
if err != nil {
return nil, err
}
//根据集群节点数量选择参与调度的节点的数量
numNodesToFind := g.numFeasibleNodesToFind(int32(len(allNodes)))
//初始化一个大小和numNodesToFind一样的数组,用来存放node节点
feasibleNodes := make([]*v1.Node, numNodesToFind)
...
checkNode := func(i int) {
//我们从上一个调度周期中离开的节点开始检查节点,以确保所有节点在Pod中被检查的机会相同。
nodeInfo := allNodes[(g.nextStartNodeIndex+i)%len(allNodes)]
fits, status, err := PodPassesFiltersOnNode(ctx, prof.PreemptHandle(), state, pod, nodeInfo)
if err != nil {
errCh.SendErrorWithCancel(err, cancel)
return
}
//如果该节点合适,那么放入到feasibleNodes列表中
if fits {
length := atomic.AddInt32(&feasibleNodesLen, 1)
if length > numNodesToFind {
cancel()
atomic.AddInt32(&feasibleNodesLen, -1)
} else {
feasibleNodes[length-1] = nodeInfo.Node()
}
} else {
statusesLock.Lock()
if !status.IsSuccess() {
statuses[nodeInfo.Node().Name] = status
}
statusesLock.Unlock()
}
}
...
//开启16个线程寻找符合条件的node节点,数量等于feasibleNodes
parallelize.Until(ctx, len(allNodes), checkNode)
processedNodes := int(feasibleNodesLen) + len(statuses)
//设置下次开始寻找node的位置
g.nextStartNodeIndex = (g.nextStartNodeIndex + processedNodes) % len(allNodes)
feasibleNodes = feasibleNodes[:feasibleNodesLen]
if err := errCh.ReceiveError(); err != nil {
statusCode = framework.Error
return nil, err
}
return feasibleNodes, nil
}
在这个方法中首先会根据numFeasibleNodesToFind方法选择参与调度的节点的数量,然后调用parallelize.Until方法开启16个线程来调用checkNode方法寻找合适的节点。
对于numFeasibleNodesToFind的逻辑如下:
func (g *genericScheduler) numFeasibleNodesToFind(numAllNodes int32) (numNodes int32) {
//对于一个小于100的节点,全部节点参与调度
//percentageOfNodesToScore参数值是一个集群中所有节点的百分比,范围是1和100之间,0表示不启用
if numAllNodes < minFeasibleNodesToFind || g.percentageOfNodesToScore >= 100 {
return numAllNodes
}
adaptivePercentage := g.percentageOfNodesToScore
//当numAllNodes大于100时,如果没有设置percentageOfNodesToScore,那么这里需要计算出一个值
if adaptivePercentage <= 0 {
basePercentageOfNodesToScore := int32(50)
adaptivePercentage = basePercentageOfNodesToScore - numAllNodes/125
if adaptivePercentage < minFeasibleNodesPercentageToFind {
adaptivePercentage = minFeasibleNodesPercentageToFind
}
}
numNodes = numAllNodes * adaptivePercentage / 100
if numNodes < minFeasibleNodesToFind {
return minFeasibleNodesToFind
}
return numNodes
}
找出能够进行调度的节点,如果节点小于100,那么全部节点参与调度。
percentageOfNodesToScore参数值是一个集群中所有节点的百分比,范围是1和100之间,0表示不启用。如果集群节点数大于100,那么就会根据这个值来计算让合适的节点数参与调度。
如果一个5000个节点的集群,percentageOfNodesToScore会默认设置为10%,也就是500个节点参与调度。
因为如果一个5000节点的集群来进行调度的话,不进行控制时,每个pod调度都需要尝试5000次的节点预选过程时非常消耗资源的。
然后我们回到findNodesThatPassFilters方法中,我们看一下PodPassesFiltersOnNode是如何筛选出合适的节点的:
func PodPassesFiltersOnNode(
ctx context.Context,
ph framework.PreemptHandle,
state *framework.CycleState,
pod *v1.Pod,
info *framework.NodeInfo,
) (bool, *framework.Status, error) {
var status *framework.Status
podsAdded := false
//待检查的 Node 是一个即将被抢占的节点,调度器就会对这个 Node ,将同样的 Predicates 算法运行两遍。
for i := 0; i < 2; i++ {
stateToUse := state
nodeInfoToUse := info
//处理优先级pod的逻辑
if i == 0 {
var err error
//查找是否有优先级大于或等于当前pod的NominatedPods,然后加入到nodeInfoToUse中
podsAdded, stateToUse, nodeInfoToUse, err = addNominatedPods(ctx, ph, pod, state, info)
if err != nil {
return false, nil, err
}
} else if !podsAdded || !status.IsSuccess() {
break
}
//运行过滤器检查该pod是否能运行在该节点上
statusMap := ph.RunFilterPlugins(ctx, stateToUse, pod, nodeInfoToUse)
status = statusMap.Merge()
if !status.IsSuccess() && !status.IsUnschedulable() {
return false, status, status.AsError()
}
}
return status.IsSuccess(), status, nil
}
这个方法用来检测node是否能通过过滤器,此方法会在调度Schedule和抢占Preempt的时被调用,如果在Schedule时被调用,那么会测试nod,能否可以让所有存在的pod以及更高优先级的pod在该node上运行。如果在抢占时被调用,那么我们首先要移除抢占失败的pod,添加将要抢占的pod。
然后RunFilterPlugins会调用runFilterPlugin方法来运行我们上面讲的getDefaultConfig中设置的过滤器:
func (f *frameworkImpl) runFilterPlugin(ctx context.Context, pl framework.FilterPlugin, state *framework.CycleState, pod *v1.Pod, nodeInfo *framework.NodeInfo) *framework.Status {
if !state.ShouldRecordPluginMetrics() {
return pl.Filter(ctx, state, pod, nodeInfo)
}
startTime := time.Now()
status := pl.Filter(ctx, state, pod, nodeInfo)
f.metricsRecorder.observePluginDurationAsync(Filter, pl.Name(), status, metrics.SinceInSeconds(startTime))
return status
}
过滤器总共有这些:nodeunschedulable,noderesources,nodename,nodeports,nodeaffinity,volumerestrictions,tainttoleration,nodevolumelimits,nodevolumelimits,nodevolumelimits,nodevolumelimits,volumebinding,volumezone,podtopologyspread,interpodaffinity
过滤器太多就不一一看了,里面的逻辑还是很清晰的,感兴趣的自己可以看看具体实现。
prioritize为节点打分
下面我们继续回到Schedule方法,运行完findNodesThatFitPod后会找到一系列符合条件的node节点,然后会调用prioritizeNodes进行打分排序:
func (g *genericScheduler) prioritizeNodes(
ctx context.Context,
prof *profile.Profile,
state *framework.CycleState,
pod *v1.Pod,
nodes []*v1.Node,
) (framework.NodeScoreList, error) {
...
scoresMap, scoreStatus := prof.RunScorePlugins(ctx, state, pod, nodes)
if !scoreStatus.IsSuccess() {
return nil, scoreStatus.AsError()
}
// Summarize all scores.
result := make(framework.NodeScoreList, 0, len(nodes))
//将分数按照node维度进行汇总
for i := range nodes {
result = append(result, framework.NodeScore{Name: nodes[i].Name, Score: 0})
for j := range scoresMap {
result[i].Score += scoresMap[j][i].Score
}
}
...
return result, nil
}
prioritizeNodes里面会调用RunScorePlugins方法,里面会遍历一系列的插件的方式为node打分。然后遍历scoresMap将结果按照node维度进行聚合。
func (f *frameworkImpl) RunScorePlugins(ctx context.Context, state *framework.CycleState, pod *v1.Pod, nodes []*v1.Node) (ps framework.PluginToNodeScores, status *framework.Status) {
...
//开启16个线程为node进行打分
parallelize.Until(ctx, len(nodes), func(index int) {
for _, pl := range f.scorePlugins {
nodeName := nodes[index].Name
s, status := f.runScorePlugin(ctx, pl, state, pod, nodeName)
if !status.IsSuccess() {
errCh.SendErrorWithCancel(fmt.Errorf(status.Message()), cancel)
return
}
pluginToNodeScores[pl.Name()][index] = framework.NodeScore{
Name: nodeName,
Score: int64(s),
}
}
})
if err := errCh.ReceiveError(); err != nil {
msg := fmt.Sprintf("error while running score plugin for pod %q: %v", pod.Name, err)
klog.Error(msg)
return nil, framework.NewStatus(framework.Error, msg)
}
//用于在调度程序计算节点的最终排名之前修改分数,保证 Score 插件的输出必须是 [MinNodeScore,MaxNodeScore]([0-100]) 范围内的整数
parallelize.Until(ctx, len(f.scorePlugins), func(index int) {
pl := f.scorePlugins[index]
nodeScoreList := pluginToNodeScores[pl.Name()]
if pl.ScoreExtensions() == nil {
return
}
status := f.runScoreExtension(ctx, pl, state, pod, nodeScoreList)
if !status.IsSuccess() {
err := fmt.Errorf("normalize score plugin %q failed with error %v", pl.Name(), status.Message())
errCh.SendErrorWithCancel(err, cancel)
return
}
})
if err := errCh.ReceiveError(); err != nil {
msg := fmt.Sprintf("error while running normalize score plugin for pod %q: %v", pod.Name, err)
klog.Error(msg)
return nil, framework.NewStatus(framework.Error, msg)
}
// 为每个节点的分数乘上一个权重
parallelize.Until(ctx, len(f.scorePlugins), func(index int) {
pl := f.scorePlugins[index]
// Score plugins' weight has been checked when they are initialized.
weight := f.pluginNameToWeightMap[pl.Name()]
nodeScoreList := pluginToNodeScores[pl.Name()]
for i, nodeScore := range nodeScoreList {
// return error if score plugin returns invalid score.
if nodeScore.Score > int64(framework.MaxNodeScore) || nodeScore.Score < int64(framework.MinNodeScore) {
err := fmt.Errorf("score plugin %q returns an invalid score %v, it should in the range of [%v, %v] after normalizing", pl.Name(), nodeScore.Score, framework.MinNodeScore, framework.MaxNodeScore)
errCh.SendErrorWithCancel(err, cancel)
return
}
nodeScoreList[i].Score = nodeScore.Score * int64(weight)
}
})
...
return pluginToNodeScores, nil
}
RunScorePlugins里面分别调用parallelize.Until方法跑三次来进行打分:
第一次会调用runScorePlugin方法,里面会调用getDefaultConfig里面设置的score的Plugin来进行打分;
第二次会调用runScoreExtension方法,里面会调用Plugin的NormalizeScore方法,用来保证分数必须是0到100之间,不是每一个plugin都会实现NormalizeScore方法。
第三此会调用遍历所有的scorePlugins,并对对应的算出的来的分数乘以一个权重。
打分的plugin共有:noderesources,imagelocality,interpodaffinity,noderesources,nodeaffinity,nodepreferavoidpods,podtopologyspread,tainttoleration
selectHost选择合适的节点
在为所有node打完分之后就会调用selectHost方法来挑选一个合适的node:
func (g *genericScheduler) selectHost(nodeScoreList framework.NodeScoreList) (string, error) {
if len(nodeScoreList) == 0 {
return "", fmt.Errorf("empty priorityList")
}
maxScore := nodeScoreList[0].Score
selected := nodeScoreList[0].Name
cntOfMaxScore := 1
for _, ns := range nodeScoreList[1:] {
if ns.Score > maxScore {
maxScore = ns.Score
selected = ns.Name
cntOfMaxScore = 1
} else if ns.Score == maxScore {
cntOfMaxScore++
if rand.Intn(cntOfMaxScore) == 0 {
// Replace the candidate with probability of 1/cntOfMaxScore
selected = ns.Name
}
}
}
return selected, nil
}
这个方法十分简单,就是挑选分数高的,如果分数相同,那么则随机挑选一个。
总结
通过这篇文章我们深入分析了k8s是如何调度节点的,以及调度节点的时候具体做了什么事情,熟悉了整个调度流程。通过对调度流程的掌握,可以直到一个pod被调度到node节点上需要经过Predicates的过滤,然后通过对node的打分,最终选择一个合适的节点进行调度。不过介于Filter以及Score的plugin太多,没有一一去介绍,感兴趣的可以自己去逐个看看。
Reference
https://kubernetes.io/docs/concepts/scheduling-eviction/kube-scheduler/
https://kubernetes.io/docs/concepts/scheduling-eviction/scheduler-perf-tuning/
https://kubernetes.io/docs/concepts/scheduling-eviction/scheduling-framework/
https://kubernetes.io/docs/concepts/configuration/pod-priority-preemption/
https://www.huweihuang.com/k8s-source-code-analysis/kube-scheduler/preempt.html
https://my.oschina.net/u/4131034/blog/3162549
https://www.servicemesher.com/blog/202003-k8s-scheduling-framework/
9.深入k8s:调度器及其源码分析的更多相关文章
- scrapy-redis(调度器Scheduler源码分析)
settings里面的配置:'''当下面配置了这个(scrapy-redis)时候,下面的调度器已经配置在scrapy-redis里面了'''##########连接配置######## REDIS_ ...
- 7.k8s.调度器scheduler 亲和性、污点
#k8s. 调度器scheduler 亲和性.污点 默认调度过程:预选 Predicates (过滤节点) --> 优选 Priorities(优先级排序) --> 优先级最高节点 实际使 ...
- hadoop之hdfs------------------FileSystem及其源码分析
FileSystem及其源码分析 FileSystem这个抽象类提供了丰富的方法用于对文件系统的操作,包括上传.下载.删除.创建等.这里多说的文件系统通常指的是HDFS(DistributedFile ...
- Qt QComboBox之setEditable和currentTextChanged及其源码分析
目录 Qt QComboBox之setEditable和currentTextChanged以及其源码分析 前言 问题的出现 问题分析 currentTextChanged信号触发 源码分析 Qt Q ...
- k8s调度器介绍(调度框架版本)
从一个pod的创建开始 由kubectl解析创建pod的yaml,发送创建pod请求到APIServer. APIServer首先做权限认证,然后检查信息并把数据存储到ETCD里,创建deployme ...
- k8s调度器、预选策略及调度方式
一.k8s调度流程 1.(预选)先排除完全不符合pod运行要求的节点2.(优先)根据一系列算法,算出node的得分,最高没有相同的,就直接选择3.上一步有相同的话,就随机选一个 二.调度方式 1.no ...
- 8.深入k8s:资源控制Qos和eviction及其源码分析
转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com,源码版本是1.19 又是一个周末,可以愉快的坐下来静静的品味一段源码,这一篇涉及到资源的 ...
- 13.深入k8s:Pod 水平自动扩缩HPA及其源码分析
转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com 源码版本是1.19 Pod 水平自动扩缩 Pod 水平自动扩缩工作原理 Pod 水平自动 ...
- 15.深入k8s:Event事件处理及其源码分析
转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com 源码版本是1.19 概述 k8s的Event事件是一种资源对象,用于展示集群内发生的情况 ...
随机推荐
- windows 下部署 .netcore 到 docker
前面我们演示了如何将 Asp.Net Core 程序部署到 iis 和 部署到 windows 服务.其实前面的都是铺垫,如何将 Asp.Net Core 站点部署到 docker 才是这个系列文章的 ...
- CSS表单与数据表(下)
2.表单 表单是用户输入内容的地方.表单涉及的控件很多,而且一直很难给它们应用样式.无法控制样式的部分,可以通过自定义控件来解决. 2.1 简单的表单 2.1.1 fieldset与legend fi ...
- JavaScript Number() 函数
JavaScript Number() 函数 JavaScript 全局对象 定义和用法 Number() 函数把对象的值转换为数字. 语法 Number(object) 参数 描述 object 必 ...
- MySQL“被动”性能优化汇总!
年少不知优化苦,遇坑方知优化难. --村口王大爷 本文内容导图如下: 我之前有很多文章都在讲性能优化的问题,比如下面这些: <switch 的性能提升了 3 倍,我只用了这一招!> < ...
- 2020-06-20:一句话总结ZK?
福哥答案2020-06-20: 这道题价值不大,但是面试题里有这道题. 分布式协调服务,注册服务和发现,树形结构,监听机制,过半机制. ZooKeeper是源代码开放的分布式协调服务,由雅虎公司创建, ...
- span和input布局时对不齐
如图 在span和input的css里各添加一行代码: vertical-align:top; (span和input在同一个盒子里)
- 漏洞重温之XSS(上)
漏洞简介 跨站脚本攻击(XSS)是指恶意攻击者往Web页面里插入恶意Script代码,当用户浏览页面之时,嵌入web网页中的script代码会被执行,从而达到恶意攻击用户的目的. XSS漏洞通常是通过 ...
- Android Studio && GitHub 团队多人一起开发
曾几何时,花了两天的时间搞了合并项目,搞得乱七八糟der,但最终还是被我搞定了,too 乱 to 做笔记.过了几个月,也就是前几天,抱着从头开始的决心,再次尝试,然鹅并没有结果.今天,再一次重新开始, ...
- Windows Server2008RFTP隔离账户的搭建
Step1:添加用户 打开DOS命令, net user net user u1 123.com /add net user u2 123.com /add Step2:创建文件夹 Step3:修改用 ...
- Hive中的用户自定义函数
1.1 关于自定义函数 1)Hive 自带了一些函数,比如:max/min等,但是数量有限,自己可以通过自定义UDF来方便的扩展. 2)当Hive提供的内置函数无法满足你的业务处理需要时,此时就可以考 ...