Halcon一维测量官方案例解析
下面的例子简要介绍了如何使用HALCON的一维测量工具。最长的部分是预处理和后处理;测量本身只包括两个操作符调用。
测量保险丝-fuse
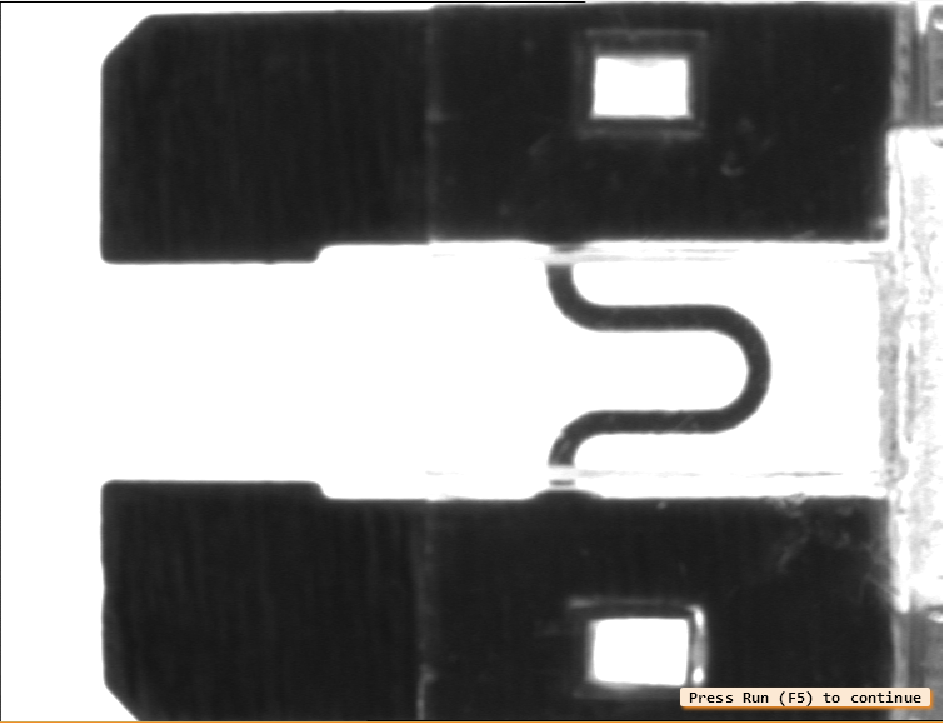
预处理主要是测量线的生成。在示例程序中,这个步骤是通过将测量对象的参数分配给变量来完成的。
read_image (Fuse, 'fuse')
Row := 297
Column := 545
Length1 := 80
Length2 := 10
Angle := rad(90)
gen_rectangle2 (ROI, Row, Column, Angle, Length1, Length2)
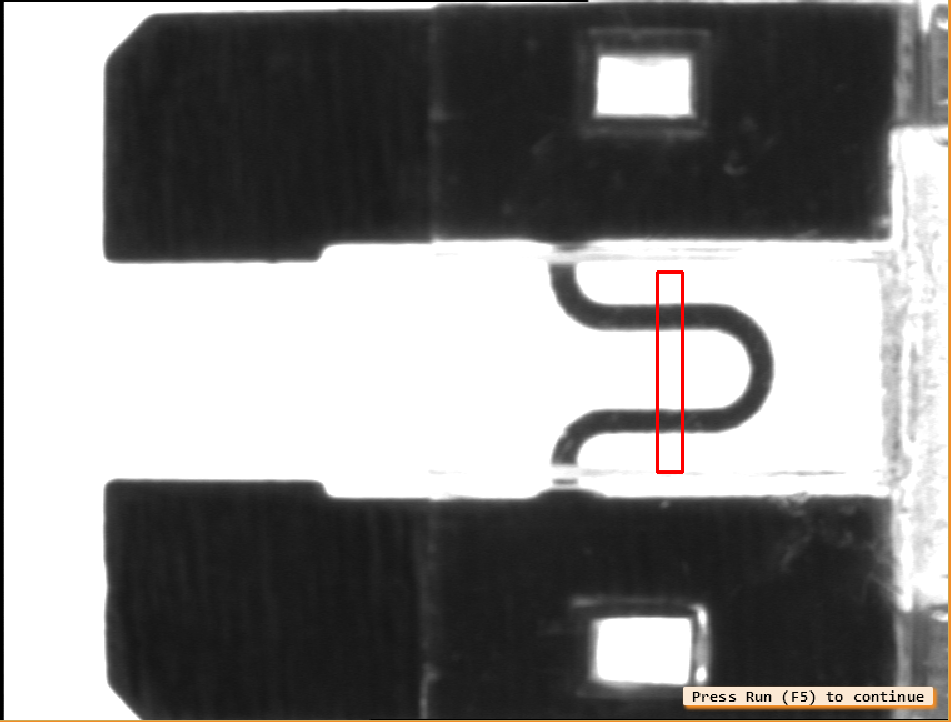
现在通过将测量对象应用到图像上进行实际测量。参数的选择使得暗区周围的边缘被分为两组线段,结果返回边缘的位置和两组线段的宽度和距离。
measure_pairs (Fuse, MeasureHandle, 1, 1, 'negative', 'all', RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, IntraDistance, InterDistance)
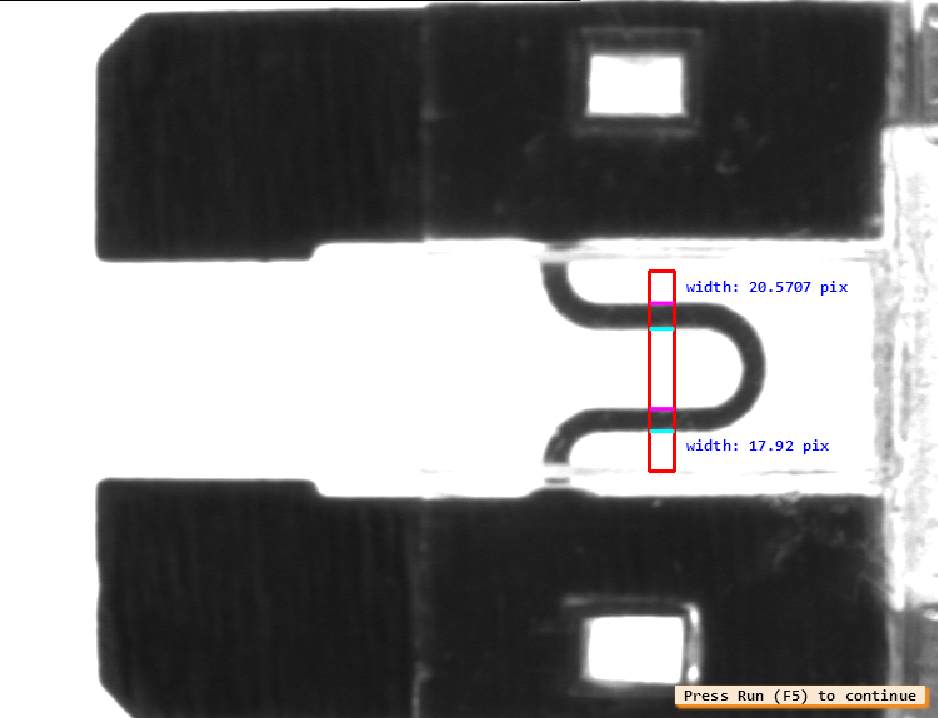
最后生成一个带有测量线参数的区域,并将边缘位置转换为短XLD等值线来显示结果。
for i := 0 to |RowEdgeFirst| - 1 by 1
gen_contour_polygon_xld (EdgeFirst, [-sin(Angle + rad(90)) * Length2 + RowEdgeFirst[i],-sin(Angle - rad(90)) * Length2 + RowEdgeFirst[i]], [cos(Angle + rad(90)) * Length2 + ColumnEdgeFirst[i],cos(Angle - rad(90)) * Length2 + ColumnEdgeFirst[i]])
gen_contour_polygon_xld (EdgeSecond, [-sin(Angle + rad(90)) * Length2 + RowEdgeSecond[i],-sin(Angle - rad(90)) * Length2 + RowEdgeSecond[i]], [cos(Angle + rad(90)) * Length2 + ColumnEdgeSecond[i],cos(Angle - rad(90)) * Length2 + ColumnEdgeSecond[i]])
dev_set_color ('cyan')
dev_display (EdgeFirst)
dev_set_color ('magenta')
dev_display (EdgeSecond)
dev_set_color ('blue')
if (i == 0)
set_tposition (WindowID, RowEdgeFirst[i] + 5, ColumnEdgeFirst[i] + 20)
else
set_tposition (WindowID, RowEdgeFirst[i] - 40, ColumnEdgeFirst[i] + 20)
endif
write_string (WindowID, 'width: ' + IntraDistance[i] + ' pix')
endfor
源程序
* fuse.hdev: 测量保险丝的宽度
*
dev_update_window ('off')
dev_close_window ()
* ****
* 采集图像
* ****
read_image (Fuse, 'fuse')
get_image_size (Fuse, Width, Height)
dev_open_window_fit_image (Fuse, 0, 0, Width, Height, WindowID)
set_display_font (WindowID, 12, 'mono', 'true', 'false')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_display (Fuse)
set_display_font (WindowID, 12, 'mono', 'true', 'false')
disp_continue_message (WindowID, 'black', 'true')
stop ()
* ****
* 创建测量对象
* ****
* -> specify ROI
Row := 297
Column := 545
Length1 := 80
Length2 := 10
Angle := rad(90)
gen_rectangle2 (ROI, Row, Column, Angle, Length1, Length2)
* -> create measure object
gen_measure_rectangle2 (Row, Column, Angle, Length1, Length2, Width, Height, 'bilinear', MeasureHandle)
dev_display (ROI)
disp_continue_message (WindowID, 'black', 'true')
stop ()
* ****
* 测量
* ****
measure_pairs (Fuse, MeasureHandle, 1, 1, 'negative', 'all', RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, IntraDistance, InterDistance)
disp_continue_message (WindowID, 'black', 'true')
stop ()
* ****
* 结果可视化
* ****
for i := 0 to |RowEdgeFirst| - 1 by 1
gen_contour_polygon_xld (EdgeFirst, [-sin(Angle + rad(90)) * Length2 + RowEdgeFirst[i],-sin(Angle - rad(90)) * Length2 + RowEdgeFirst[i]], [cos(Angle + rad(90)) * Length2 + ColumnEdgeFirst[i],cos(Angle - rad(90)) * Length2 + ColumnEdgeFirst[i]])
gen_contour_polygon_xld (EdgeSecond, [-sin(Angle + rad(90)) * Length2 + RowEdgeSecond[i],-sin(Angle - rad(90)) * Length2 + RowEdgeSecond[i]], [cos(Angle + rad(90)) * Length2 + ColumnEdgeSecond[i],cos(Angle - rad(90)) * Length2 + ColumnEdgeSecond[i]])
dev_set_color ('cyan')
dev_display (EdgeFirst)
dev_set_color ('magenta')
dev_display (EdgeSecond)
dev_set_color ('blue')
if (i == 0)
set_tposition (WindowID, RowEdgeFirst[i] + 5, ColumnEdgeFirst[i] + 20)
else
set_tposition (WindowID, RowEdgeFirst[i] - 40, ColumnEdgeFirst[i] + 20)
endif
write_string (WindowID, 'width: ' + IntraDistance[i] + ' pix')
endfor
disp_continue_message (WindowID, 'black', 'true')
stop ()
* ****
* 销毁对象
* ****
close_measure (MeasureHandle)
dev_update_window ('on')
dev_clear_window ()
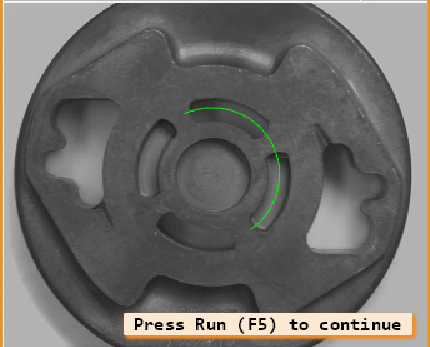
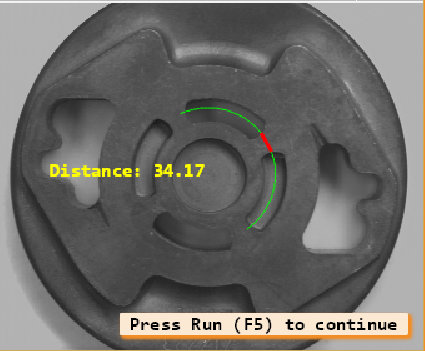
测量金属铸造部件-measure_arc
本例是检测铸件倒角后拉长孔之间的距离。为了达到最好的精度,建议使用背光与远心镜头相结合的方式,而不是图中的设置。

这个任务可以通过使用带有圆形测量ROI的测量工具轻松解决。ROI的中心被放置在铸件的中心;半径设置为拉长孔与中心的距离。
Row := 275
Column := 335
Radius := 107
AngleStart := -rad(55)
AngleExtent := rad(170)
gen_measure_arc (Row, Column, Radius, AngleStart, AngleExtent, 10, Width, Height, 'nearest_neighbor', MeasureHandle)
现在,可以通过一个运算符的调用来测量孔之间的距离。
measure_pos (Zeiss1, MeasureHandle, 1, 10, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance)
源程序
* 例子包括很多可视化操作。
read_image (Zeiss1, 'zeiss1')
get_image_size (Zeiss1, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width / 2, Height / 2, 'black', WindowHandle)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
dev_display (Zeiss1)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* draw_circle (WindowHandle, Row, Column, Radius)
Row := 275
Column := 335
Radius := 107
AngleStart := -rad(55)
AngleExtent := rad(170)
dev_set_draw ('fill')
dev_set_color ('green')
dev_set_line_width (1)
get_points_ellipse (AngleStart + AngleExtent, Row, Column, 0, Radius, Radius, RowPoint, ColPoint)
disp_arc (WindowHandle, Row, Column, AngleExtent, RowPoint, ColPoint)
dev_set_line_width (3)
gen_measure_arc (Row, Column, Radius, AngleStart, AngleExtent, 10, Width, Height, 'nearest_neighbor', MeasureHandle)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
count_seconds (Seconds1)
n := 10
for i := 1 to n by 1
measure_pos (Zeiss1, MeasureHandle, 1, 10, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance)
endfor
count_seconds (Seconds2)
Time := (Seconds2 - Seconds1) / n
disp_continue_message (WindowHandle, 'black', 'true')
* stop ()
distance_pp (RowEdge[1], ColumnEdge[1], RowEdge[2], ColumnEdge[2], IntermedDist)
* dev_display (Zeiss1)
dev_set_color ('red')
* disp_circle (WindowHandle, RowEdge, ColumnEdge, RowEdge - RowEdge + 1)
disp_line (WindowHandle, RowEdge[1], ColumnEdge[1], RowEdge[2], ColumnEdge[2])
dev_set_color ('yellow')
disp_message (WindowHandle, 'Distance: ' + IntermedDist, 'image', 250, 80, 'yellow', 'false')
* dump_window (WindowHandle, 'tiff_rgb', 'C:\\Temp\\zeiss_result')
dev_set_line_width (1)
* disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_clear_window ()
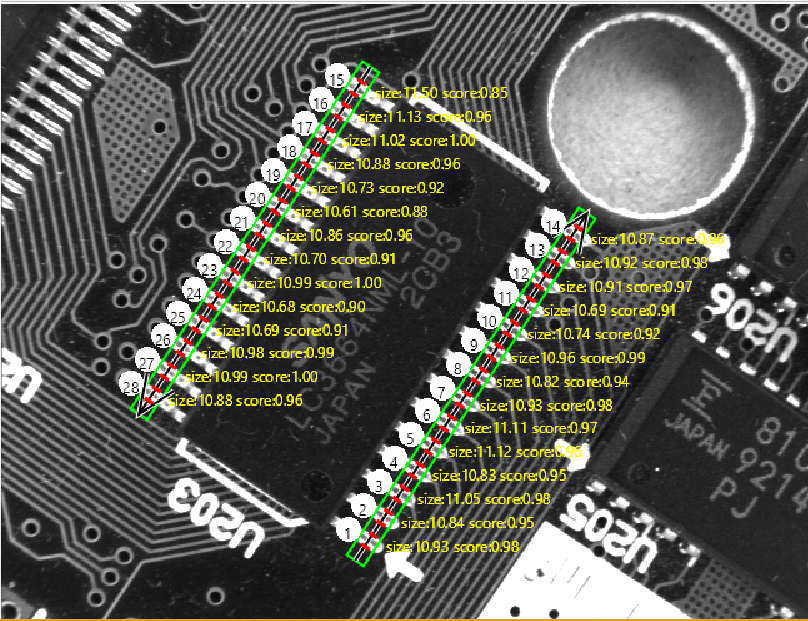
使用模糊测量法测量集成电路-fuzzy_measure_pin
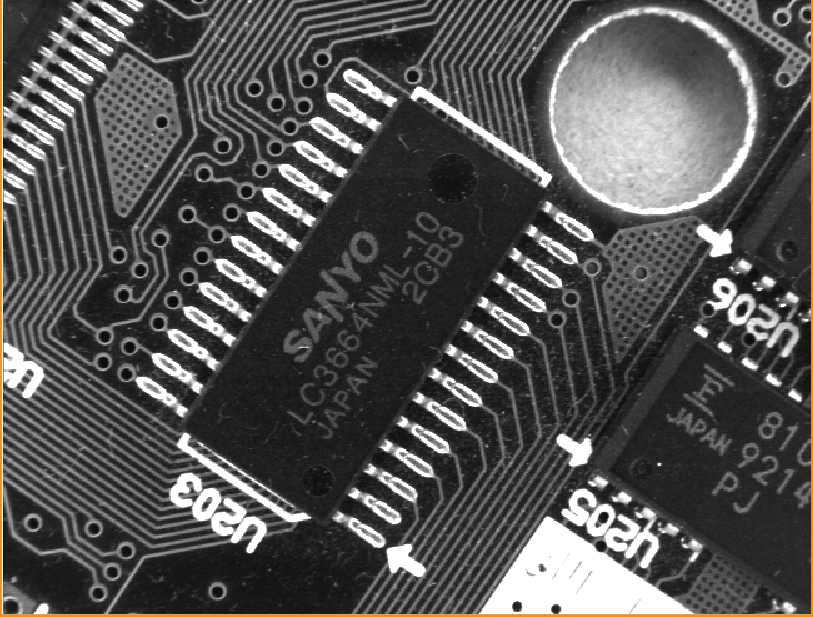
本例是测量IC的引线宽度和引线距离。本例中的照明条件相当困难,造成了每个引线都有四个边缘可见。模糊规则就是用于将测量限制在正确的(外)引线上。
gen_measure_rectangle2 (Row2, Col2, Phi2, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle2)
create_funct_1d_pairs ([0.0,0.3], [1.0,0.0], FuzzyAbsSizeDiffFunction)
set_fuzzy_measure_norm_pair (MeasureHandle1, 11.0, 'size_abs_diff', FuzzyAbsSizeDiffFunction)
fuzzy_measure_pairs (Image, MeasureHandle1, 1, 30, 0.5, 'positive', RowEdgeFirst1, ColumnEdgeFirst1, AmplitudeFirst1, RowEdgeSecond1, ColumnEdgeSecond1, AmplitudeSecond1, RowEdgeMiddle1, ColumnEdgeMiddle1, FuzzyScore1, IntraDistance1, InterDistance1)
源程序
dev_close_window ()
read_image (Image, 'board/board-06')
get_image_size (Image, Width, Height)
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
*
* 模糊测量:
Row1 := 305.5
Col1 := 375.5
Phi1 := 0.982
Length1 := 167
Length2 := 8
gen_measure_rectangle2 (Row1, Col1, Phi1, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle1)
Row2 := 188.5
Col2 := 202.5
Phi2 := Phi1 - rad(180)
gen_measure_rectangle2 (Row2, Col2, Phi2, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle2)
* 创建一个模糊函数来选择芯片引脚边缘对的大小(约11Pixels)。
create_funct_1d_pairs ([0.0,0.3], [1.0,0.0], FuzzyAbsSizeDiffFunction)
set_fuzzy_measure_norm_pair (MeasureHandle1, 11.0, 'size_abs_diff', FuzzyAbsSizeDiffFunction)
set_fuzzy_measure_norm_pair (MeasureHandle2, 11.0, 'size_abs_diff', FuzzyAbsSizeDiffFunction)
fuzzy_measure_pairs (Image, MeasureHandle1, 1, 30, 0.5, 'positive', RowEdgeFirst1, ColumnEdgeFirst1, AmplitudeFirst1, RowEdgeSecond1, ColumnEdgeSecond1, AmplitudeSecond1, RowEdgeMiddle1, ColumnEdgeMiddle1, FuzzyScore1, IntraDistance1, InterDistance1)
fuzzy_measure_pairs (Image, MeasureHandle2, 1, 30, 0.5, 'positive', RowEdgeFirst2, ColumnEdgeFirst2, AmplitudeFirst2, RowEdgeSecond2, ColumnEdgeSecond2, AmplitudeSecond2, RowEdgeMiddle2, ColumnEdgeMiddle2, FuzzyScore2, IntraDistance2, InterDistance2)
*
* 可视化:
dev_display (Image)
* 可视化测量区域
dev_display_measure_object (Row1, Col1, Phi1, Length1, Length2)
dev_display_measure_object (Row2, Col2, Phi2, Length1, Length2)
* 可视化边缘对
dev_set_draw ('fill')
Pin := 1
dev_display_profile_points ([RowEdgeFirst1,RowEdgeSecond1], [ColumnEdgeFirst1,ColumnEdgeSecond1], Row1, Col1, Phi1, Length1, Length2)
for I := 0 to |ColumnEdgeFirst1| - 1 by 1
disp_message (WindowHandle, 'size:' + IntraDistance1[I]$'.2f' + ' score:' + FuzzyScore1[I]$'.2f', 'image', RowEdgeSecond1[I], ColumnEdgeSecond1[I] + 10, 'yellow', 'false')
MRow := RowEdgeSecond1[I] - 5
MCol := ColumnEdgeSecond1[I] - 20
dev_set_color ('white')
gen_circle (Circle, MRow, MCol, 10)
dev_display (Circle)
get_string_extents (WindowHandle, Pin, Ascent, Descent, SWidth, SHeight)
disp_message (WindowHandle, Pin, 'window', MRow - SHeight / 2, MCol - SWidth / 2, 'black', 'false')
Pin := Pin + 1
endfor
dev_display_profile_points ([RowEdgeFirst2,RowEdgeSecond2], [ColumnEdgeFirst2,ColumnEdgeSecond2], Row2, Col2, Phi2, Length1, Length2)
for I := 0 to |ColumnEdgeFirst2| - 1 by 1
dev_set_color ('yellow')
disp_message (WindowHandle, 'size:' + IntraDistance2[I]$'.2f' + ' score:' + FuzzyScore2[I]$'.2f', 'image', RowEdgeFirst2[I], ColumnEdgeFirst2[I] + 10, 'yellow', 'false')
MRow := RowEdgeFirst2[I] - 5
MCol := ColumnEdgeFirst2[I] - 20
dev_set_color ('white')
gen_circle (Circle, MRow, MCol, 10)
dev_display (Circle)
get_string_extents (WindowHandle, Pin, Ascent, Descent, SWidth, SHeight)
disp_message (WindowHandle, Pin, 'window', MRow - SHeight / 2, MCol - SWidth / 2, 'black', 'false')
Pin := Pin + 1
endfor
测量可移动的IC的引线-pm_measure_board
本例的任务是测量可移动的芯片引线的位置。 由于芯片可以出现在不同的位置和角度,用于测量的感兴趣的区域必须对齐。
在这种情况下,通过使用基于形状的匹配搜索芯片上的印刷字符来实现对准。
gen_rectangle2 (Rectangle2, Row + Rect2Row, Column + Rect2Col, RectPhi, RectLength1, RectLength2)
reduce_domain (Image, Rectangle, ImageReduced)
create_shape_model (ImageReduced, 4, 0, rad(360), rad(1), 'none', 'use_polarity', 30, 10, ModelID)
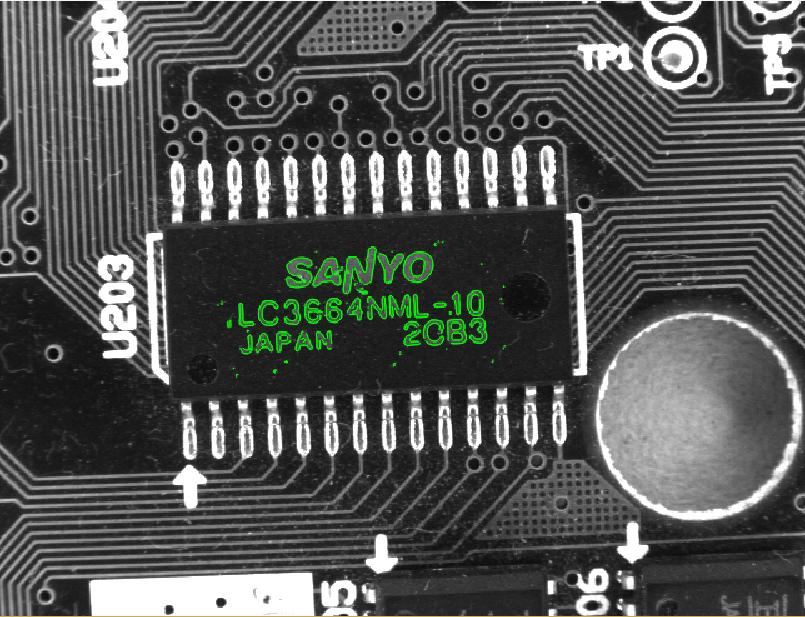
找到印刷品后,ROI的位置将相对于印刷字符的位置进行几何变换。
find_shape_model (ImageCheck, ModelID, 0, rad(360), 0.7, 1, 0.5, 'least_squares', 4, 0.7, RowCheck, ColumnCheck, AngleCheck, Score)
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, RowCheck, ColumnCheck, HomMat2DTranslate)
hom_mat2d_rotate (HomMat2DTranslate, AngleCheck, RowCheck, ColumnCheck, HomMat2DRotate)
affine_trans_pixel (HomMat2DRotate, Rect1Row, Rect1Col, Rect1RowCheck, Rect1ColCheck)

然后,创建测量工具并应用测量。
gen_measure_rectangle2 (Rect1RowCheck, Rect1ColCheck, AngleCheck, RectLength1, RectLength2, Width, Height, 'bilinear', MeasureHandle1)
measure_pairs (ImageCheck, MeasureHandle1, 2, 90, 'positive', 'all', RowEdgeFirst1, ColumnEdgeFirst1, AmplitudeFirst1, RowEdgeSecond1, ColumnEdgeSecond1, AmplitudeSecond1, IntraDistance1, InterDistance1)
源程序
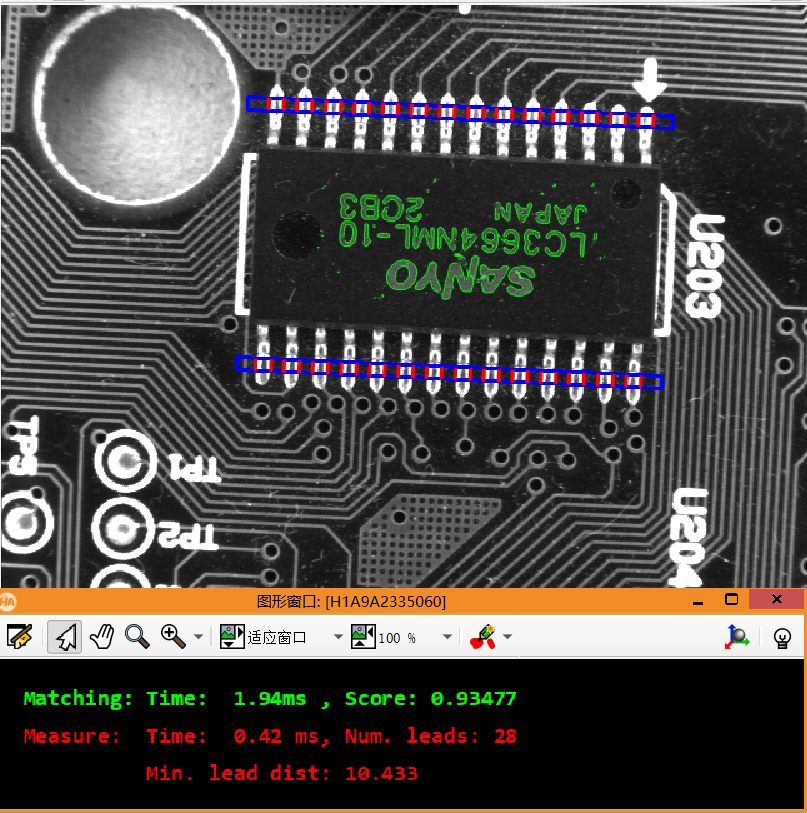
* 这个示例程序展示了如何使用模式匹配与形状模型来定位一个对象。 此外,它还展示了如何使用检测到的物体位置和旋转来构建检测任务的ROI。在这个例子中,IC上的印刷字符被用来寻找IC。 从找到的位置和旋转,构建两个测量矩形来测量IC引线之间的间距。 由于打光的缘故,引线在几个位置和旋转处的饱和灰度值为255,这扩大了引线的实际宽度,减小了引线之间的间距。
dev_update_pc ('off')
dev_update_window ('off')
dev_update_var ('off')
open_framegrabber ('File', 1, 1, 0, 0, 0, 0, 'default', -1, 'default', -1, 'default', 'board/board.seq', 'default', -1, 1, FGHandle)
grab_image (Image, FGHandle)
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
dev_open_window (Height + 70, 0, Width, 120, 'black', WindowHandleText)
dev_set_window (WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
set_display_font (WindowHandleText, 16, 'mono', 'true', 'false')
dev_set_color ('red')
dev_display (Image)
Row1 := 188
Column1 := 182
Row2 := 298
Column2 := 412
gen_rectangle1 (Rectangle, Row1, Column1, Row2, Column2)
area_center (Rectangle, Area, Row, Column)
Rect1Row := -102
Rect1Col := 5
Rect2Row := 107
Rect2Col := 5
RectPhi := 0
RectLength1 := 170
RectLength2 := 5
gen_rectangle2 (Rectangle1, Row + Rect1Row, Column + Rect1Col, RectPhi, RectLength1, RectLength2)
gen_rectangle2 (Rectangle2, Row + Rect2Row, Column + Rect2Col, RectPhi, RectLength1, RectLength2)
reduce_domain (Image, Rectangle, ImageReduced)
create_shape_model (ImageReduced, 4, 0, rad(360), rad(1), 'none', 'use_polarity', 30, 10, ModelID)
get_shape_model_contours (ShapeModel, ModelID, 1)
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, Row, Column, HomMat2DTranslate)
affine_trans_contour_xld (ShapeModel, ShapeModelTrans, HomMat2DTranslate)
dev_display (Image)
dev_set_color ('green')
dev_display (ShapeModelTrans)
dev_set_color ('blue')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_display (Rectangle1)
dev_display (Rectangle2)
dev_set_draw ('fill')
dev_set_line_width (1)
dev_set_color ('yellow')
disp_message (WindowHandle, ['Press left button to start','and stop the demo'], 'window', 12, 12, 'black', 'true')
get_mbutton (WindowHandle, Row3, Column3, Button1)
wait_seconds (0.5)
Button := 0
while (Button != 1)
dev_set_window (WindowHandle)
dev_set_part (0, 0, Height - 1, Width - 1)
grab_image (ImageCheck, FGHandle)
dev_display (ImageCheck)
count_seconds (S1)
find_shape_model (ImageCheck, ModelID, 0, rad(360), 0.7, 1, 0.5, 'least_squares', 4, 0.7, RowCheck, ColumnCheck, AngleCheck, Score)
count_seconds (S2)
dev_display (ImageCheck)
if (|Score| > 0)
dev_set_color ('green')
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, RowCheck, ColumnCheck, HomMat2DTranslate)
hom_mat2d_rotate (HomMat2DTranslate, AngleCheck, RowCheck, ColumnCheck, HomMat2DRotate)
affine_trans_contour_xld (ShapeModel, ShapeModelTrans, HomMat2DRotate)
dev_display (ShapeModelTrans)
affine_trans_pixel (HomMat2DRotate, Rect1Row, Rect1Col, Rect1RowCheck, Rect1ColCheck)
affine_trans_pixel (HomMat2DRotate, Rect2Row, Rect2Col, Rect2RowCheck, Rect2ColCheck)
gen_rectangle2 (Rectangle1Check, Rect1RowCheck, Rect1ColCheck, AngleCheck, RectLength1, RectLength2)
gen_rectangle2 (Rectangle2Check, Rect2RowCheck, Rect2ColCheck, AngleCheck, RectLength1, RectLength2)
dev_set_color ('blue')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_display (Rectangle1Check)
dev_display (Rectangle2Check)
dev_set_draw ('fill')
count_seconds (S3)
gen_measure_rectangle2 (Rect1RowCheck, Rect1ColCheck, AngleCheck, RectLength1, RectLength2, Width, Height, 'bilinear', MeasureHandle1)
gen_measure_rectangle2 (Rect2RowCheck, Rect2ColCheck, AngleCheck, RectLength1, RectLength2, Width, Height, 'bilinear', MeasureHandle2)
measure_pairs (ImageCheck, MeasureHandle1, 2, 90, 'positive', 'all', RowEdgeFirst1, ColumnEdgeFirst1, AmplitudeFirst1, RowEdgeSecond1, ColumnEdgeSecond1, AmplitudeSecond1, IntraDistance1, InterDistance1)
measure_pairs (ImageCheck, MeasureHandle2, 2, 90, 'positive', 'all', RowEdgeFirst2, ColumnEdgeFirst2, AmplitudeFirst2, RowEdgeSecond2, ColumnEdgeSecond2, AmplitudeSecond2, IntraDistance2, InterDistance2)
count_seconds (S4)
dev_set_color ('red')
disp_line (WindowHandle, RowEdgeFirst1 - RectLength2 * cos(AngleCheck), ColumnEdgeFirst1 - RectLength2 * sin(AngleCheck), RowEdgeFirst1 + RectLength2 * cos(AngleCheck), ColumnEdgeFirst1 + RectLength2 * sin(AngleCheck))
disp_line (WindowHandle, RowEdgeSecond1 - RectLength2 * cos(AngleCheck), ColumnEdgeSecond1 - RectLength2 * sin(AngleCheck), RowEdgeSecond1 + RectLength2 * cos(AngleCheck), ColumnEdgeSecond1 + RectLength2 * sin(AngleCheck))
disp_line (WindowHandle, RowEdgeFirst2 - RectLength2 * cos(AngleCheck), ColumnEdgeFirst2 - RectLength2 * sin(AngleCheck), RowEdgeFirst2 + RectLength2 * cos(AngleCheck), ColumnEdgeFirst2 + RectLength2 * sin(AngleCheck))
disp_line (WindowHandle, RowEdgeSecond2 - RectLength2 * cos(AngleCheck), ColumnEdgeSecond2 - RectLength2 * sin(AngleCheck), RowEdgeSecond2 + RectLength2 * cos(AngleCheck), ColumnEdgeSecond2 + RectLength2 * sin(AngleCheck))
dev_set_line_width (1)
NumLeads := |IntraDistance1| + |IntraDistance2|
MinDistance := min([InterDistance1,InterDistance2])
dev_set_window (WindowHandleText)
dev_set_part (0, 0, 119, Width - 1)
dev_clear_window ()
disp_message (WindowHandleText, 'Matching: Time: ' + ((S2 - S1) * 1000)$'5.2f' + 'ms , Score: ' + Score$'7.5f', 'image', 20, 20, 'green', 'false')
disp_message (WindowHandleText, 'Measure: Time: ' + ((S4 - S3) * 1000)$'5.2f' + ' ms, Num. leads: ' + NumLeads$'2d', 'image', 50, 20, 'red', 'false')
disp_message (WindowHandleText, ' Min. lead dist: ' + MinDistance$'6.3f', 'image', 80, 20, 'red', 'false')
endif
dev_error_var (Error, 1)
dev_set_check ('~give_error')
get_mposition (WindowHandle, R, C, Button)
dev_error_var (Error, 0)
dev_set_check ('give_error')
if (Error != H_MSG_TRUE)
Button := 0
endif
endwhile
dev_set_window (WindowHandleText)
dev_close_window ()
close_framegrabber (FGHandle)
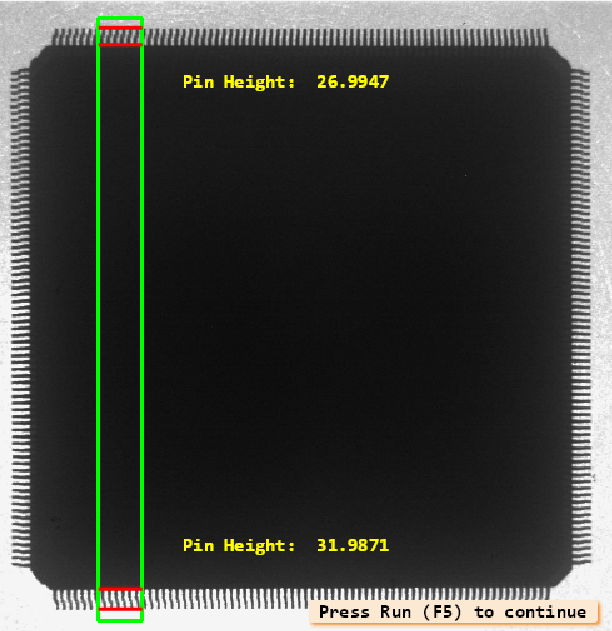
测量IC-measure_pin
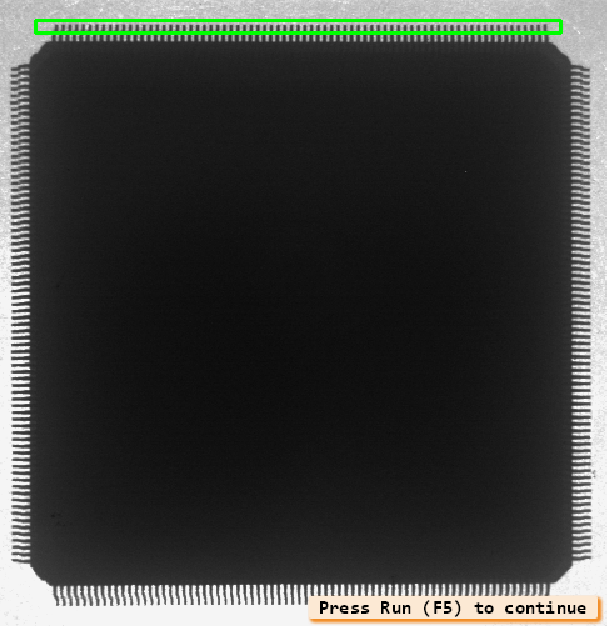
本例的任务是检查集成电路的主要尺寸。
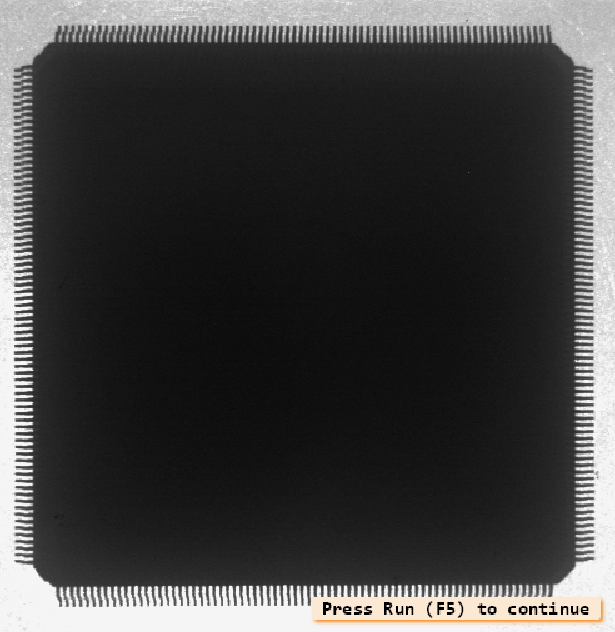
第一步,测量每个引线的范围和引线之间的距离。为此,定义了一个包含引线的矩形用来生成测量对象。这是用来提取垂直于矩形主轴线的直边对。
gen_measure_rectangle2 (Row, Column, Phi, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle)
measure_pairs (Image, MeasureHandle, 1.5, 30, 'negative', 'all', RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, PinWidth, PinDistance)
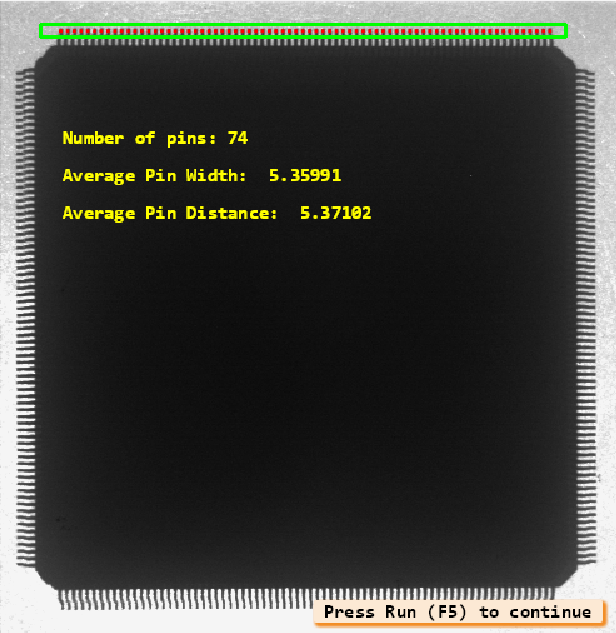
从提取的直边对中,得出引线的数量、平均宽度和它们之间的平均距离。
avgPinWidth := sum(PinWidth) / |PinWidth|
avgPinDistance := sum(PinDistance) / |PinDistance|
numPins := |PinWidth|
第二部分显示测量工具。尽管每根引线的宽度只有几个像素,导线的长度是可以确定的。为此,一个基于包含IC两边相对引线的矩形的测量对象生成了。第一个和第二个边缘之间的距离是上引线的长度,第三个和第四个边缘之间的距离是下引线的长度。
gen_measure_rectangle2 (Row, Column, Phi, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle)
measure_pos (Image, MeasureHandle, 1.5, 30, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance)
源程序
dev_close_window ()
read_image (Image, 'ic_pin')
get_image_size (Image, Width, Height)
dev_open_window (0, 0, Width / 2, Height / 2, 'black', WindowHandle)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
dev_display (Image)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* draw_rectangle2 (WindowHandle, Row, Column, Phi, Length1, Length2)
Row := 47
Column := 485
Phi := 0
Length1 := 420
Length2 := 10
dev_set_color ('green')
dev_set_draw ('margin')
dev_set_line_width (3)
gen_rectangle2 (Rectangle, Row, Column, Phi, Length1, Length2)
gen_measure_rectangle2 (Row, Column, Phi, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_update_pc ('off')
dev_update_var ('off')
n := 100
count_seconds (Seconds1)
for i := 1 to n by 1
measure_pairs (Image, MeasureHandle, 1.5, 30, 'negative', 'all', RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, PinWidth, PinDistance)
endfor
count_seconds (Seconds2)
Time := Seconds2 - Seconds1
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_set_color ('red')
disp_line (WindowHandle, RowEdgeFirst, ColumnEdgeFirst, RowEdgeSecond, ColumnEdgeSecond)
avgPinWidth := sum(PinWidth) / |PinWidth|
avgPinDistance := sum(PinDistance) / |PinDistance|
numPins := |PinWidth|
dev_set_color ('yellow')
disp_message (WindowHandle, 'Number of pins: ' + numPins, 'image', 200, 100, 'yellow', 'false')
disp_message (WindowHandle, 'Average Pin Width: ' + avgPinWidth, 'image', 260, 100, 'yellow', 'false')
disp_message (WindowHandle, 'Average Pin Distance: ' + avgPinDistance, 'image', 320, 100, 'yellow', 'false')
* dump_window (WindowHandle, 'tiff_rgb', 'C:\\Temp\\pins_result')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* draw_rectangle1 (WindowHandle, Row1, Column1, Row2, Column2)
Row1 := 0
Column1 := 600
Row2 := 100
Column2 := 700
dev_set_color ('blue')
disp_rectangle1 (WindowHandle, Row1, Column1, Row2, Column2)
stop ()
dev_set_part (Row1, Column1, Row2, Column2)
dev_display (Image)
dev_set_color ('green')
dev_display (Rectangle)
dev_set_color ('red')
disp_line (WindowHandle, RowEdgeFirst, ColumnEdgeFirst, RowEdgeSecond, ColumnEdgeSecond)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_set_part (0, 0, Height - 1, Width - 1)
dev_display (Image)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_set_color ('green')
* draw_rectangle2 (WindowHandle, Row, Column, Phi, Length1, Length2)
Row := 508
Column := 200
Phi := -1.5708
Length1 := 482
Length2 := 35
gen_rectangle2 (Rectangle, Row, Column, Phi, Length1, Length2)
gen_measure_rectangle2 (Row, Column, Phi, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle)
stop ()
measure_pos (Image, MeasureHandle, 1.5, 30, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance)
PinHeight1 := RowEdge[1] - RowEdge[0]
PinHeight2 := RowEdge[3] - RowEdge[2]
dev_set_color ('red')
disp_line (WindowHandle, RowEdge, ColumnEdge - Length2, RowEdge, ColumnEdge + Length2)
disp_message (WindowHandle, 'Pin Height: ' + PinHeight1, 'image', RowEdge[1] + 40, ColumnEdge[1] + 100, 'yellow', 'false')
disp_message (WindowHandle, 'Pin Height: ' + PinHeight2, 'image', RowEdge[3] - 120, ColumnEdge[3] + 100, 'yellow', 'false')
* dump_window (WindowHandle, 'tiff_rgb', 'C:\\Temp\\pins_height_result')
dev_set_draw ('fill')
dev_set_line_width (1)
Halcon一维测量官方案例解析的更多相关文章
- Halcon一维测量1D Measuring解析
一维测量(也叫一维计量或卡尺)的概念非常直观.沿着一个预定的区域(主要是垂直于RIO感兴趣区域的方向) 边缘的位置.这里的边缘为从暗到亮或从亮到暗的过渡. 基于提取的边缘,可以测量零件的尺寸.例如,可 ...
- 【Python五篇慢慢弹(5)】类的继承案例解析,python相关知识延伸
类的继承案例解析,python相关知识延伸 作者:白宁超 2016年10月10日22:36:57 摘要:继<快速上手学python>一文之后,笔者又将python官方文档认真学习下.官方给 ...
- SQL Server 连接问题案例解析(1)
SQL Server 连接问题案例解析(1) 转载自:http://blogs.msdn.com/b/apgcdsd/archive/2015/04/27/sql.aspx?CommentPosted ...
- 通过angularJS官方案例快速入门
官方案例-angular-phonecat angularJS官方提供了一个官方案例给大家进行循序渐进的学习,但是如果之前没有接触过node.js以及git的同学这个案例拿着也无从下手-这里就介绍一下 ...
- caffe︱cifar-10数据集quick模型的官方案例
准备拿几个caffe官方案例用来练习,就看到了caffe中的官方案例有cifar-10数据集.于是练习了一下,在CPU情况下构建quick模型.主要参考博客:liumaolincycle的博客 配置: ...
- 【java设计模式】(6)---迭代器模式(案例解析)
设计模式之迭代器模式 一.java迭代器介绍 1.迭代器接口 在jdk中,与迭代器相关的接口有两个:Iterator 与 Iterable. Iterator:迭代器,Iterator及其子类通常是迭 ...
- 案例解析|政府信息化的BI建设应用 .
一.行业背景 某建设厅综合监管信息化平台,是政企业务协同的平台之一,同时兼具协作.门户.办公应用集成.用户权限管理等多项功能.在此要求基础上,选择中间件基础技术平台,可以在最大程度满足平台功能需求的前 ...
- Halcon一维运算相关算子整理
Halcon一维离散函数算子 1. abs_funct_1d 计算一维数组的绝对值 2. compose_funct_1将两个离散的一维函数合并为一个函数 3. cre ...
- UE4的AI学习(2)——官方案例实例分析
官方给出的AI实例是实现一个跟随着玩家跑的AI,当玩家没有在AI视野里时,它会继续跑到最后看到玩家的地点,等待几秒后如果仍然看不到玩家,则跑回初始地点.官方的案例已经讲得比较详细,对于一些具体的函数调 ...
随机推荐
- Django自定义500的错误显示信息
这个方法应该对Django version 2.2.4以后的版本都有效,因为我的项目是这个版本,其他版本我并没有测试. 首先找到Django的exception.py文件路径: C:\python_ ...
- Node.js躬行记(4)——自建前端监控系统
这套前端监控系统用到的技术栈是:React+MongoDB+Node.js+Koa2.将性能和错误量化.因为自己平时喜欢吃菠萝,所以就取名叫菠萝系统.其实在很早以前就有这个想法,当时已经实现了前端的参 ...
- CSS sprites的定义及使用
定义:CSS sprites 其实就是把网页中的一些背景图片整合到一张图片文件中,再利用CSS的“background-image”.“background-repeat”.“background-p ...
- cb46a_c++_STL_算法_逆转和旋转reverse_rotate函数advance
cb46a_c++_STL_算法_逆转和旋转reverse_rotateSTL算法--变序性算法reverse() 逆转reverse_copy()一边复制一般逆转rotate()旋转,某个位置开始前 ...
- 图像处理中的valid卷积与same卷积
valid卷积 在full卷积的卷积过程中,会遇到\(K_{flip}\)靠近I的边界(K矩阵与I矩阵),就会有部分延申到I之外,这时候忽略边界,只考虑I完全覆盖\(K_{flip}\)内的值情况,这 ...
- 005.OpenShift访问控制-权限-角色
一 Kubetcl namespace 1.1 namespace描述 Kubernetes namespace提供了将一组相关资源组合在一起的机制.在Red Hat OpenShift容器平台中,p ...
- JavaWeb的登陆与注销功能
JavaWeb 登录与注销 大致流程 一般我们在Web应用中 登录页面一般是以 login.jsp的首页 大致流程如下: 当我们在前台写入用户名和密码之后,点击登录按钮 会将表单提交给一个LoginS ...
- 十万同时在线用户,需要多少内存?——Newbe.Claptrap 框架水平扩展实验
Newbe.Claptrap 项目是笔者正在构建以反应式.Actor模式和事件溯源为理论基础的一套服务端开发框架.本篇我们将来了解一下框架在水平扩展方面的能力. 前情提要 时隔许久,今日我们再次见面. ...
- Python-16-分配参数
与收集参数相反,这里用*和**分配参数 def add(x, y): return x + y 使用*分配元组 params = (1, 2) >>> ad ...
- laravel Excel 导入
<?php namespace App\Modules\Live\Http\Controllers; use Illuminate\Http\Request; use Maatwebsite\E ...