深入浅出AQS源码解析
最近一直在研究AQS的源码,希望可以更深刻的理解AQS的实现原理。虽然网上有很多关于AQS的源码分析,但是看完以后感觉还是一知半解。于是,我将自己的整个理解过程记录下来了,希望对大家有所帮助。
基本原理
AQS是Java中锁的基础,主要由两个队列组成。一个队列是同步队列,另一个是条件队列。
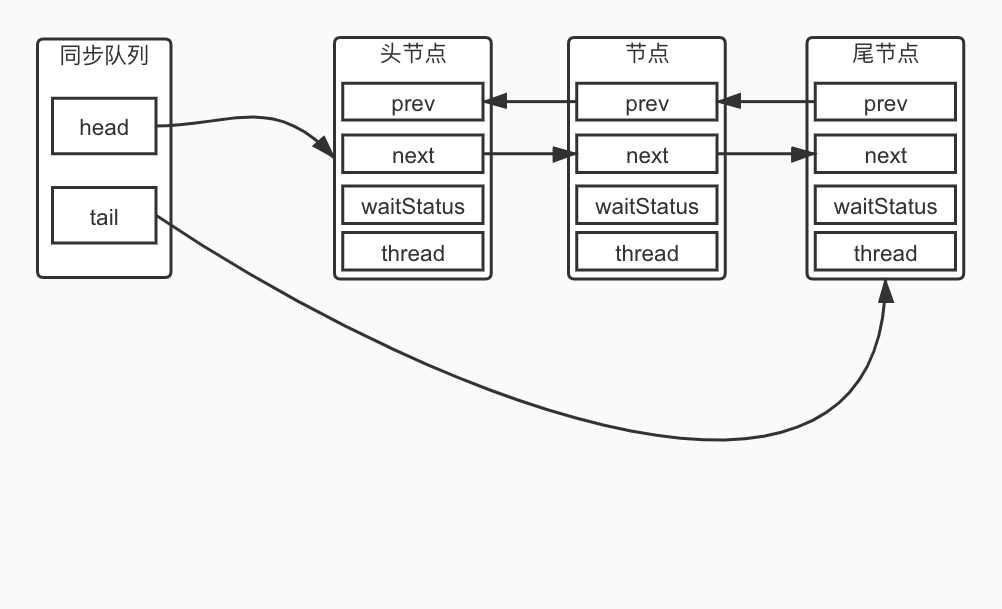
同步队列的原理
- 同步队列的队列头部是
head,队列尾部是tail节点,head节点是一个空节点,同步队列是一个双向链表,通过next和prev连接所有节点 - 所有的线程在竞争锁的时候都会创建一个
Node节点,线程与节点绑定在一起,(如果是同步锁和排他锁不同之处是通过nextWaiter来区分的)并且添加到同步队列的尾部 head的第一个节点获取锁,其余节点都需要等待被唤醒- 同步队列中的节点会存在取消和
null的情况(如:线程超时中断、线程更新节点的中间态),被取消和null的节点不能被唤醒,将会被视为无效节点 - 一个线程只能被有效的前驱节点(取消和
null的节点除外)唤醒 - 持有锁的线程只能是有一个,其他有效节点对应的线程都会被挂起
条件队列的原理
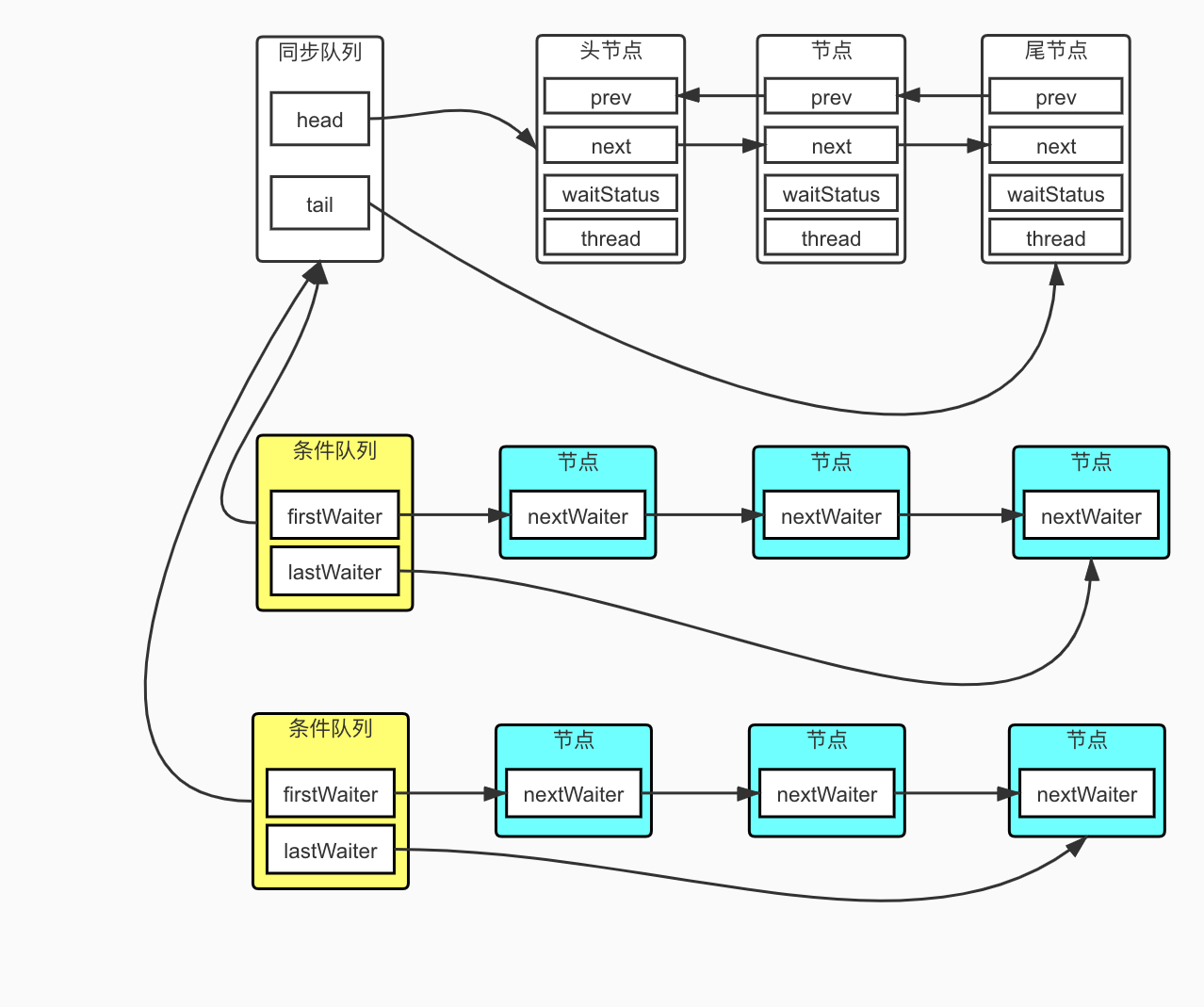
- 一个同步队列可以对应多个条件队列
- 条件队列是一个单向链表,通过
nextWaiter来连接起来,条件队列的头节点是firstWaiter,尾节点是lastWaiter - 某个条件队列中满足条件的节点(被
signal或signalAll方法唤醒的节点)才会被转移到同步队列 - 条件队列中的被转移到同步队列的节点是从头节点开始,条件队列中被阻塞的线程会添加到队列的尾部
同步队列的实现
首先,了解以下同步队列中队列的节点Node的数据结构
static final class Node {/** 共享锁的标识 */static final Node SHARED = new Node();/** 排他锁的标识 */static final Node EXCLUSIVE = null;/** 线程取消 */static final int CANCELLED = 1;/** 持有锁的线程的后继线程被挂起 */static final int SIGNAL = -1;/** 条件队列标识 */static final int CONDITION = -2;/*** 共享锁情况下,通知所有其他节点*/static final int PROPAGATE = -3;/*** waitStatus的取值如下:* SIGNAL(-1): 当前节点的后继节点应该被挂起* CANCELLED(1): 当前节点被取消* CONDITION(-2): 当前节点在条件队列* PROPAGATE(-3): 释放共享锁时需要通知所有节点* 0: 初始值**/volatile int waitStatus;/*** 前驱节点*/volatile Node prev;/*** 后继节点*/volatile Node next;/*** 节点对应的线程*/volatile Thread thread;/*** 在共享锁的情况下,该节点的值为SHARED* 在排他锁的情况下,该节点的值为EXCLUSIVE* 在条件队列的情况下,链接的是下一个等待条件的线程*/Node nextWaiter;}
其次,我们来看一下同步队列的链表结构
接着,我们根据同步队列的原理来分析以下acquire和release需要做哪些事情:
实现acquire功能需要做的事情
- 创建一个Node节点
node(该节点可能是排他锁,也可以能是共享锁) - 将
node添加到同步队列尾部,如果同步队列为空(初始情况下),需要先创建一个空的头节点,然后再添加到队列的尾部 - 如果
node的前驱节点是head,说明node是第一个节点,能够获取锁,需要将head修改成node,释放前驱节点的资源 - 如果
node的前驱节点不是head,说明获取锁失败,需要检测是否需要将node绑定的线程挂起,分以下几种情况:- 如果
node的waitStatus已经被设置为SIGNAL表示需要被挂起 - 如果
node的waitStatus设置为CANCEL表示该节点已经被取消,需要被去掉,并修改node的prev,直到链接上一个有效的节点为止 - 否则将
node的waitStatus设置为SIGNAL,表示即将要被挂起
- 如果
- 如果需要将
node绑定的线程挂起,则让出CPU,直到当前驱节点来唤起node才会开始继续从步骤3开始执行
与acquire功能相关的代码
- acquire方法:获取排他锁
public final void acquire(int arg) {if (!tryAcquire(arg) &&acquireQueued(addWaiter(Node.EXCLUSIVE), arg))selfInterrupt();}
tryAcquire(arg):对外提供的一个扩展方法,常用的锁都要实现这个方法,具体实现与锁相关addWaiter(Node.EXCLUSIVE): 创建一个排他锁节点,并将该节点添加到同步队列尾部,代码如下:
private Node addWaiter(Node mode) {// 创建一个node,EXCLUSIVE类型Node node = new Node(mode);for (;;) {// 获取尾节点Node oldTail = tail;if (oldTail != null) {// 设置即将成为尾节点的前驱node.setPrevRelaxed(oldTail);// CAS操作设置尾节点if (compareAndSetTail(oldTail, node)) {// 将新尾节点的前驱节点与新的尾节点关联起来oldTail.next = node;// 返回添加的节点// 这个节点现在不一定是尾节点,因为如果有多个线程调用这个方法时,// 可能还有节点添加在这个节点后面return node;}} else {// 如果队列为空,初始化头节点initializeSyncQueue();}}}
acquireQueued:同步队列中的节点获取排他锁
final boolean acquireQueued(final Node node, int arg) {try {// 线程是否中断boolean interrupted = false;for (;;) {// 获取前驱节点final Node p = node.predecessor();// 如果前驱节点是头节点,获取锁if (p == head && tryAcquire(arg)) {// 修改头节点setHead(node);// 释放头节点的资源p.next = null; // help GC// 返回线程中断的状态// 这也是该方法唯一的返回值// 没有获取锁的线程会一直执行该方法直到获取锁以后再返回return interrupted;}// 获取锁失败后是否需要将线程挂起if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt()) // 线程挂起并返回是否被中断interrupted = true;}} catch (Throwable t) {// 取消该节点cancelAcquire(node);throw t;}}
shouldParkAfterFailedAcquire:检测线程获取锁失败以后是否需要被挂起
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {// 前驱节点的状态int ws = pred.waitStatus;if (ws == Node.SIGNAL)/** 状态已经设置成SIGNAL,可以直接挂起该节点*/return true;// 节点被取消if (ws > 0) {/** 找到pred第一个有效的前驱节点*/do {node.prev = pred = pred.prev;} while (pred.waitStatus > 0);// pred可能是一个新的节点,需要将pred的next重写设置为nodepred.next = node;} else {/** CAS操作将pred节点的状态设置为SIGNAL*/pred.compareAndSetWaitStatus(ws, Node.SIGNAL);}// 只有当pred节点的waitStatus已经是SIGNAL状态时,才可以安全的挂起线程// 否则需要不能被挂起return false;}
parkAndCheckInterrupt:将当前线程挂起,并检测当前线程是否中断
private final boolean parkAndCheckInterrupt() {// 线程挂起LockSupport.park(this);// 检测线程是否中断return Thread.interrupted();}
cancelAcquire:取消节点
private void cancelAcquire(Node node) {// 如果节点为空,什么都不做if (node == null)return;// 释放线程node.thread = null;// 从后往前过滤掉所有的被取消的节点Node pred = node.prev;while (pred.waitStatus > 0)node.prev = pred = pred.prev;// 有效前驱节点的nex节点Node predNext = pred.next;// 将node设置为CANCELLEDnode.waitStatus = Node.CANCELLED;// 如果是尾节点,设置新的尾节点if (node == tail && compareAndSetTail(node, pred)) {// 将新的尾节点的后续设置为nullpred.compareAndSetNext(predNext, null);} else {// If successor needs signal, try to set pred's next-link// so it will get one. Otherwise wake it up to propagate.int ws;// 如果前驱节点的线程不为null并且waitStatus为SIGNALif (pred != head &&((ws = pred.waitStatus) == Node.SIGNAL ||(ws <= 0 && pred.compareAndSetWaitStatus(ws, Node.SIGNAL))) &&pred.thread != null) {Node next = node.next;// 将node设置成pred的后继节点if (next != null && next.waitStatus <= 0)pred.compareAndSetNext(predNext, next);} else {// 唤起node节点的后继节点// 因为node节点已经释放锁了unparkSuccessor(node);}node.next = node; // help GC}}
unparkSuccessor:唤醒后继节点
private void unparkSuccessor(Node node) {/** 获取node节点的waitStatus*/int ws = node.waitStatus;// 用CSA操作将waitStatus设置成初始状态// 不管设置是否成功,都无所谓,因为该节点即将被销毁if (ws < 0)node.compareAndSetWaitStatus(ws, 0);/** 获取node的后继节点*/Node s = node.next;// 如果后继节点为null或者被取消,// 通过从同步队列的尾节点开始一直往前找到一个有效的后继节点if (s == null || s.waitStatus > 0) {s = null;for (Node p = tail; p != node && p != null; p = p.prev)if (p.waitStatus <= 0)s = p;}// 如果后继节点不为空if (s != null)LockSupport.unpark(s.thread);// 唤醒后继节点的线程}
与acquire方法类似的还有acquireInterruptibly、tryAcquireNanos、acquireShared、acquireSharedInterruptibly和tryAcquireSharedNanos,我们都一一分析以下
- acquireInterruptibly方法:获取可中断的排他锁
public final void acquireInterruptibly(int arg)throws InterruptedException {if (Thread.interrupted()) // 如果线程中断,直接返回throw new InterruptedException();if (!tryAcquire(arg))doAcquireInterruptibly(arg); // 中断式的获取锁}
doAcquireInterruptibly:可中断式的获取锁
private void doAcquireInterruptibly(int arg)throws InterruptedException {// 创建一个排他节点加入同步队列final Node node = addWaiter(Node.EXCLUSIVE);try {for (;;) {// 获取前驱节点final Node p = node.predecessor();// 如果前驱节点是头节点,说明已经获取的锁if (p == head && tryAcquire(arg)) {// 修改头节点setHead(node);p.next = null; // help GCreturn;}// 如果没有获取锁,检测是否需要挂起if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt())throw new InterruptedException(); // 如果发现线程已经被中断,需要抛出异常}} catch (Throwable t) {// 发生异常取消节点cancelAcquire(node);throw t;}}
- tryAcquireNanos方法:超时中断获取排他锁
public final boolean tryAcquireNanos(int arg, long nanosTimeout)throws InterruptedException {if (Thread.interrupted())throw new InterruptedException(); // 线程中断直接返回return tryAcquire(arg) ||doAcquireNanos(arg, nanosTimeout); // 超时获取排他锁}
doAcquireNanos:超时获取排他锁
private boolean doAcquireNanos(int arg, long nanosTimeout)throws InterruptedException {// 如果超时直接返回if (nanosTimeout <= 0L)return false;// 获取超时时长final long deadline = System.nanoTime() + nanosTimeout;// 添加一个排他节点到同步队列尾部final Node node = addWaiter(Node.EXCLUSIVE);try {for (;;) {// 获取前驱节点final Node p = node.predecessor();// 已经获取锁if (p == head && tryAcquire(arg)) {setHead(node);p.next = null; // help GCreturn true;}nanosTimeout = deadline - System.nanoTime();// 如果超时了就取消if (nanosTimeout <= 0L) {cancelAcquire(node);return false;}// 检测节点是否需要被挂起if (shouldParkAfterFailedAcquire(p, node) &&nanosTimeout > SPIN_FOR_TIMEOUT_THRESHOLD)// 如果需要挂起,且超时时长大于SPIN_FOR_TIMEOUT_THRESHOLD// 线程挂起nanosTimeout时间LockSupport.parkNanos(this, nanosTimeout);if (Thread.interrupted())throw new InterruptedException();}} catch (Throwable t) {// 发生异常取消节点cancelAcquire(node);throw t;}}
- acquireShared方法:获取共享锁
public final void acquireShared(int arg) {// 对外提供的一个扩展方法,常用的锁都要实现这个方法,// 该方法的实现与锁的用途有关if (tryAcquireShared(arg) < 0)doAcquireShared(arg); // 获取共享锁}
doAcquireShared:获取共享锁
private void doAcquireShared(int arg) {// 添加一个共享节点到同步队列尾部final Node node = addWaiter(Node.SHARED);try {boolean interrupted = false;for (;;) {// 获取前驱节点final Node p = node.predecessor();if (p == head) {// 返回结果大于等于0表示获取共享锁int r = tryAcquireShared(arg);if (r >= 0) {// 设置头节点并广播通知其他获取共享锁的节点setHeadAndPropagate(node, r);p.next = null; // help GC// 如果线程被中断,将该线程中断// 共享锁会被多个线程获取,如果需要中断// 所有获取共享锁的线程都要被中断if (interrupted)selfInterrupt();return;}}// 检测是否需要挂起if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt()) // 挂起并中断interrupted = true;}} catch (Throwable t) {// 发生异常取消节点cancelAcquire(node);throw t;}}
setHeadAndPropagate:设置头节点并广播其他节点来获取锁
private void setHeadAndPropagate(Node node, int propagate) {Node h = head; // 记录旧的头节点setHead(node);// 设置新的头节点/** 如果头节点为null或者是不是取消状态,尝试唤醒后继节点*/if (propagate > 0 || h == null || h.waitStatus < 0 ||(h = head) == null || h.waitStatus < 0) {Node s = node.next;// node节点的next是SHARED,即共享锁if (s == null || s.isShared())// 唤起获取共享锁的线程doReleaseShared();}}
doReleaseShared:唤醒等待共享锁的节点
private void doReleaseShared() {/** 唤醒时是从头节点开始先唤醒第一个共享节点,* 第一个共享节点被唤醒后会在doAcquireShared方法里继续执行(之前就是在这个方法里被挂起的)* 第一个共享节点如果获取锁会调用setHeadAndPropagate方法修改头节点,然后再调用doReleaseShared方法* 唤醒第二个共享节点,以此类推,最后把所有的共享节点都唤醒*/for (;;) {Node h = head;if (h != null && h != tail) {// 获取头节点的状态int ws = h.waitStatus;// 如果头节点是SIGNAL,需要将状态设置为0,表示已经即将被唤醒if (ws == Node.SIGNAL) {if (!h.compareAndSetWaitStatus(Node.SIGNAL, 0))continue; // 如果失败了说明有其他线程在修改头节点,需要继续重试unparkSuccessor(h); // 唤醒头节点的后继节点}else if (ws == 0 &&!h.compareAndSetWaitStatus(0, Node.PROPAGATE))continue; // 将头节点状态从0设置成PROPAGATE,如果失败了继续,因为也有其他获取共享锁的线程在更改头节点}// 如果头节点未改变(因为没有后继节点需要等待共享锁),跳出循环if (h == head)break;}}
selfInterrupt:中断当前线程
static void selfInterrupt() {Thread.currentThread().interrupt();}
- acquireSharedInterruptibly方法:可中断的获取共享锁
public final void acquireSharedInterruptibly(int arg)throws InterruptedException {if (Thread.interrupted())throw new InterruptedException(); // 如果线程被中断抛出异常if (tryAcquireShared(arg) < 0)doAcquireSharedInterruptibly(arg); // 可中断的方式获取共享锁}
doAcquireSharedInterruptibly:可中断的方式后去共享锁
private void doAcquireSharedInterruptibly(int arg)throws InterruptedException {// 添加共享锁节点到同步队列尾部final Node node = addWaiter(Node.SHARED);try {for (;;) {// 获取前驱节点final Node p = node.predecessor();if (p == head) {int r = tryAcquireShared(arg);if (r >= 0) {// 获取共享锁以后修改头节点,通知其他等待共享锁的节点setHeadAndPropagate(node, r);p.next = null; // help GCreturn;}}// 线程获取共享锁失败后需要挂起,并且发现线程被中断,所以抛出异常if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt())throw new InterruptedException();}} catch (Throwable t) {// 发生异常取消节点cancelAcquire(node);throw t;}}
- tryAcquireSharedNanos方法:超时中断获取共享锁
public final boolean tryAcquireSharedNanos(int arg, long nanosTimeout)throws InterruptedException {if (Thread.interrupted()) // 线程如果中断了,直接抛出异常throw new InterruptedException();return tryAcquireShared(arg) >= 0 ||doAcquireSharedNanos(arg, nanosTimeout); // 超时获取共享锁}
doAcquireSharedNanos:超时的方式获取中断锁
private boolean doAcquireSharedNanos(int arg, long nanosTimeout)throws InterruptedException {// 超时直接返回if (nanosTimeout <= 0L)return false;final long deadline = System.nanoTime() + nanosTimeout;// 添加共享节点到同步队列尾部final Node node = addWaiter(Node.SHARED);try {for (;;) {// 获取前驱节点final Node p = node.predecessor();if (p == head) {int r = tryAcquireShared(arg);if (r >= 0) {// 获取锁,修改头节点,通知所有其他等待共享锁的节点setHeadAndPropagate(node, r);p.next = null; // help GCreturn true;}}nanosTimeout = deadline - System.nanoTime();if (nanosTimeout <= 0L) {// 超时取消节点cancelAcquire(node);return false;}if (shouldParkAfterFailedAcquire(p, node) &&nanosTimeout > SPIN_FOR_TIMEOUT_THRESHOLD)// 如果需要挂起,且超时时长大于SPIN_FOR_TIMEOUT_THRESHOLD// 线程挂起nanosTimeout时间LockSupport.parkNanos(this, nanosTimeout);if (Thread.interrupted())throw new InterruptedException(); // 中断了抛出异常}} catch (Throwable t) {// 发生异常取消节点cancelAcquire(node);throw t;}}
实现release功能需要做的事情
- 释放当前获取锁的线程持有的资源
- 唤醒有效的一个后继节点
与release功能相关的代码
- release方法:释放排他锁
public final boolean release(int arg) {if (tryRelease(arg)) {Node h = head;// 头节点不能是一个中间态if (h != null && h.waitStatus != 0)// 唤醒后继节点unparkSuccessor(h);return true;}return false;}
- release方法:释放共享锁
public final boolean releaseShared(int arg) {if (tryReleaseShared(arg)) {// 释放共享锁,从头节点开始一个一个的释放// 如果存在多个共享节点在同步队列时,doReleaseShared方式其实是递归调用doReleaseShared();return true;}return false;}
至此,将所有获取锁和释放锁的方法相关的源码全部分析完
条件队列的实现
我们来看一下条件队列的链表结构
实现await功能需要做的事情
- 创建一个
CONDITION类型的节点,将该节点添加到条件队列 - 释放已经获取的锁(因为只有当前线程先获取了锁才可能再调用
Condition.await()方法) - 如果无法获取锁,线程挂起
与await功能相关的代码
- await方法:等待条件
public final void await() throws InterruptedException {if (Thread.interrupted())throw new InterruptedException(); // 如果线程中断,直接抛出异常// 创建一个CONDITION类型的节点,将该节点添加到条件队列尾部Node node = addConditionWaiter();// 释放锁// 在调用await方法之前都会调用lock方法,这个时候已经获取锁了// 有时候锁还是可重入的,所以需要将所有的资源都释放掉int savedState = fullyRelease(node);int interruptMode = 0;// 如果节点不再同步队列,全部都要挂起while (!isOnSyncQueue(node)) {LockSupport.park(this);// 如果在等待期间发生过中断(不管是调用signal之前还是之后),直接退出if ((interruptMode = checkInterruptWhileWaiting(node)) != 0)break;}// 让线程尝试去获取锁,如果无法获取锁就挂起if (acquireQueued(node, savedState) && interruptMode != THROW_IE)interruptMode = REINTERRUPT;// 清除所有在条件队列中是取消状态的节点if (node.nextWaiter != null) // clean up if cancelledunlinkCancelledWaiters();// 发生中断,上报中断情况if (interruptMode != 0)reportInterruptAfterWait(interruptMode);}
addConditionWaiter:在条件队列中添加一个节点
private Node addConditionWaiter() {Node t = lastWaiter;// 清除条件队列中无效的节点if (t != null && t.waitStatus != Node.CONDITION) {unlinkCancelledWaiters();t = lastWaiter;}// 创建一个节点Node node = new Node(Node.CONDITION);// 添加到条件队列尾部if (t == null)firstWaiter = node;elset.nextWaiter = node;lastWaiter = node;return node;}
unlinkCancelledWaiters:清除在条件队列中被取消的节点
private void unlinkCancelledWaiters() {Node t = firstWaiter;Node trail = null;// 遍历条件队列将所有不是CONDITION状态的节点全部清除掉// 这些节点都是取消状态的节点while (t != null) {Node next = t.nextWaiter;if (t.waitStatus != Node.CONDITION) {t.nextWaiter = null;if (trail == null)firstWaiter = next;elsetrail.nextWaiter = next;if (next == null)lastWaiter = trail;}elsetrail = t;t = next;}}
fullyRelease:释放线程持有的所有锁资源
final int fullyRelease(Node node) {try {int savedState = getState();// 释放所有的资源// 如果是可重入锁,savedState就是重入的次数if (release(savedState))return savedState;throw new IllegalMonitorStateException();} catch (Throwable t) {// 发生异常就取消该节点node.waitStatus = Node.CANCELLED;throw t;}}
isOnSyncQueue:判断节点是否在同步队列
final boolean isOnSyncQueue(Node node) {// waitStatus是CONDITION或者node没有前驱节点,说明node不在同步队列if (node.waitStatus == Node.CONDITION || node.prev == null)return false;if (node.next != null) // 有后继节点一定在同步队列return true;/** 在同步队列中查找node,看是否在同步队列中*/return findNodeFromTail(node);}
findNodeFromTail:在同步队列中查找节点
private boolean findNodeFromTail(Node node) {// 从尾节点开始查找for (Node p = tail;;) {if (p == node) // 找到了return true;if (p == null) // 找到头了还没找到return false;p = p.prev;}}
checkInterruptWhileWaiting:检测中断的情况
private int checkInterruptWhileWaiting(Node node) {// 没有发生中断返回0// 调用signal之前发生中断返回THROW_IE// 调用signal之后发生中断返回REINTERRUPTreturn Thread.interrupted() ?(transferAfterCancelledWait(node) ? THROW_IE : REINTERRUPT) :0;}
transferAfterCancelledWait:清除在条件队列中被取消的节点
// 只有线程处于中断状态,才会调用此方法// 如果需要的话,将这个已经取消等待的节点转移到阻塞队列// 返回 true,如果此线程在 signal 之前被取消,否则返回falsefinal boolean transferAfterCancelledWait(Node node) {// 用 CAS 将节点状态设置为 0// 如果这步 CAS 成功,说明是 signal 方法之前发生的中断,// 因为如果 signal 先发生的话,signal 中会将 waitStatus 设置为 0if (node.compareAndSetWaitStatus(Node.CONDITION, 0)) {enq(node); // 将节点放入阻塞队列return true;}// 到这里是因为 CAS 失败,肯定是因为 signal 方法已经将 waitStatus 设置为了 0// signal 方法会将节点转移到阻塞队列,但是可能还没完成,这边自旋等待其完成// 当然,这种事情还是比较少的吧:signal 调用之后,没完成转移之前,发生了中断while (!isOnSyncQueue(node))Thread.yield();return false;}
enq:把节点添加到同步队列
private Node enq(Node node) {// 无限循环,将节点添加到同步队列尾部for (;;) {Node oldTail = tail;if (oldTail != null) {node.setPrevRelaxed(oldTail);if (compareAndSetTail(oldTail, node)) {oldTail.next = node;return oldTail;}} else {// 如果同步队列为空,初始化initializeSyncQueue();}}}
reportInterruptAfterWait:中断处理
private void reportInterruptAfterWait(int interruptMode)throws InterruptedException {// 如果是THROW_IE状态,抛异常if (interruptMode == THROW_IE)throw new InterruptedException();else if (interruptMode == REINTERRUPT) // 再次中断,因为中断状态被使用过一次selfInterrupt();}
awaitNanos、awaitUntil和await(long time, TimeUnit unit)这几个方法的整体逻辑是一样的,就不再分析了
实现signal功能需要做的事情
- 将条件队列中的节点加入同步队列
- 唤醒线程
与signal功能相关的代码
- signal方法:唤醒等待条件的节点
public final void signal() {if (!isHeldExclusively())throw new IllegalMonitorStateException();// 获取条件队列中的第一个节点Node first = firstWaiter;if (first != null)// 唤醒等待条件的节点doSignal(first);}
doSignal:唤醒等待条件的节点
private void doSignal(Node first) {do {// 去掉无效的节点if ( (firstWaiter = first.nextWaiter) == null)lastWaiter = null;first.nextWaiter = null;} while (!transferForSignal(first) && // 将节点转移到同步队列(first = firstWaiter) != null);}
transferForSignal:将节点转移到同步队列
final boolean transferForSignal(Node node) {/** 取消的节点不需要转移*/if (!node.compareAndSetWaitStatus(Node.CONDITION, 0))return false;/** 将节点加入同步队列尾部*/Node p = enq(node);int ws = p.waitStatus;// ws > 0 说明 node 在阻塞队列中的前驱节点取消了等待锁,直接唤醒 node 对应的线程// 如果 ws <= 0, 那么 compareAndSetWaitStatus 将会被调用// 节点入队后,需要把前驱节点的状态设为SIGNALif (ws > 0 || !p.compareAndSetWaitStatus(ws, Node.SIGNAL))// 如果前驱节点取消或者 CAS 失败,会进到这里唤醒线程LockSupport.unpark(node.thread);return true;}
- signalAlll方法:唤醒所有等待条件的节点
public final void signalAll() {// 如果是当前线程if (!isHeldExclusively())throw new IllegalMonitorStateException();Node first = firstWaiter;if (first != null)// 唤醒所有等待条件的节点doSignalAll(first);}
doSignalAll:唤醒所有等待条件的节点
// 将所有的节点都转移到同步队列private void doSignalAll(Node first) {lastWaiter = firstWaiter = null;do {Node next = first.nextWaiter;first.nextWaiter = null;transferForSignal(first);first = next;} while (first != null);}
现在将与AQS相关的核心代码都整理了一遍,里面如果有描述不清晰或者不准确的地方希望大家可以帮忙指出!
深入浅出AQS源码解析的更多相关文章
- 深入浅出ReentrantLock源码解析
ReentrantLock不但是可重入锁,而且还是公平或非公平锁,在工作中会经常使用到,将自己对这两种锁的理解记录下来,希望对大家有帮助. 前提条件 在理解ReentrantLock时需要具备一些基本 ...
- 深入浅出ReentrantReadWriteLock源码解析
读写锁实现逻辑相对比较复杂,但是却是一个经常使用到的功能,希望将我对ReentrantReadWriteLock的源码的理解记录下来,可以对大家有帮助 前提条件 在理解ReentrantReadWri ...
- 深入浅出Semaphore源码解析
Semaphore通过permits的值来限制线程访问临界资源的总数,属于有限制次数的共享锁,不支持重入. 前提条件 在理解Semaphore时需要具备一些基本的知识: 理解AQS的实现原理 之前有写 ...
- AbstractQueuedSynchronizer(AQS)源码解析
关于AQS的源码解析,本来是没有打算特意写一篇文章来介绍的.不过在写本学期课程作业中,有一门写了关于AQS的,而且也画了一些相关的图,所以直接拿过来分享一下,如有错误欢迎指正. ...
- AQS源码解析(一)-AtomicBoolean源码解析
基本类: AtomicInteger AtomicLong AtomicBoolean 数组类型: AtomicIntegerArray AtomicLongArray AtomicReference ...
- 源码解析之AQS源码解析
要理解Lock首先要理解AQS,而要理解并发类最好的方法是先理解其并发控制量不同值的含义以及该类运作流程,然后配合一步步看源码.该类有一个重要的控制量是WaitStates,节点的状态值. /** w ...
- AQS源码解析
文大篇幅引用自HongJie大佬的一行一行源码分析清楚AbstractQueuedSynchronizer,这只是一篇简单的个人整理思路和总结(倒垃圾),如果觉得有些难懂的话,不要犹豫也不要疑惑,很明 ...
- 并发编程之:AQS源码解析
大家好,我是小黑,一个在互联网苟且偷生的农民工. 在Java并发编程中,经常会用到锁,除了Synchronized这个JDK关键字以外,还有Lock接口下面的各种锁实现,如重入锁ReentrantLo ...
- AbstractQueuedSynchronizer源码解析
1.简介 AbstractQueuedSynchronizer队列同步器,用来实现锁或者其他同步组件的基础框架 AbstractQueuedSynchronizer使用int类型的volatile变量 ...
随机推荐
- QTabWidget 中 关于Tab 关闭和添加的基本教程!
QTabWidget是PyQt5 中使用较为广泛的容器之一,经常会在日常使用的软件中用到它:QTabwidget是由几个标签组成,每个标签可以当作一个界面,下面就是应用Qtabwidget的一个简单例 ...
- 千万不要更新网易云音乐UWP!!!!!
网易云音乐UWP没了!!! 现在 Micrsoft Store 里面的是垃圾 Win32 转置版!!!! 万不可更新!!! 若已经更新,还有救回来的办法:下载 https://lanzous.com/ ...
- 备份、恢复数据库(Dos命令提示符下)_数据库安装工具_连载_1
Dos命令提示符下: 备份.恢复数据库,是不是很简单啊,是的,当你20年不碰MS SQL,是不是又忘记了呢,答案也许也是吧,^_^虽然在程序中执行SQL代码时,很讨厌那个Go,正如MySQL中那个分号 ...
- 线上服务的FGC问题排查,看这篇就够了!
线上服务的GC问题,是Java程序非常典型的一类问题,非常考验工程师排查问题的能力.同时,几乎是面试必考题,但是能真正答好此题的人并不多,要么原理没吃透,要么缺乏实战经验. 过去半年时间里,我们的广告 ...
- MySQL的LIKE模糊查询优化
原文链接:https://www.cnblogs.com/whyat/p/10512797.html %xxx%这种方式对于数据量少的时候,我们倒可以随意用,但是数据量大的时候,我们就体验到了查询性能 ...
- Python实现二分法和黄金分割法
运筹学课上,首先介绍了非线性规划算法中的无约束规划算法.二分法和黄金分割法是属于无约束规划算法的一维搜索法中的代表. 二分法:$$x_{1}^{(k+1)}=\frac{1}{2}(x_{R}^{(k ...
- laravel查询常用的方式含义.
find($id) 传值并返回一个模型.如果不存在匹配的模型,则返回null.findOrFail($id) 传值并返回一个模型.如果不存在匹配的模型, 它会抛出异常.first() 返回在数据库中找 ...
- uni-app之实现分页
一.下载库 官方文档地址为:https://ext.dcloud.net.cn/plugin?id=32 点击下载zip压缩包即可,下载完毕后解压到放置前端相关组件目录,即components目录. ...
- 多语言工作者の十日冲刺<5/10>
这个作业属于哪个课程 软件工程 (福州大学至诚学院 - 计算机工程系) 这个作业要求在哪里 团队作业第五次--Alpha冲刺 这个作业的目标 团队进行Alpha冲刺--第五天(05.04) 作业正文 ...
- springboot的jar为何能独立运行
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...