Sobel边缘检测算法(转载)
转载请注明出处: http://blog.csdn.net/tianhai110
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量
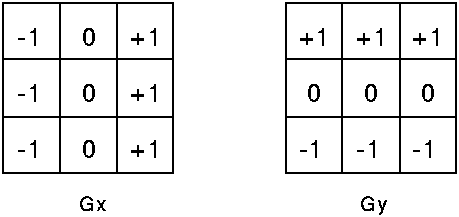
Sobel卷积因子为:
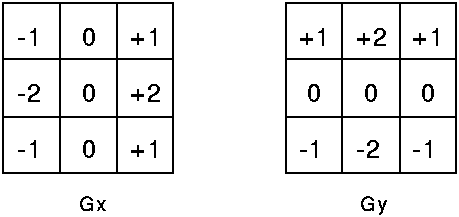
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
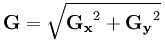
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
通常,为了提高效率 使用不开平方的近似值:
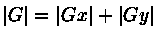
如果梯度G大于某一阀值 则认为该点(x,y)为边缘点。
然后可用以下公式计算梯度方向:
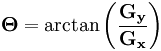
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
附带知识:
普利维特算子(Prewitt operate):
除sobel边缘检测外 还有Prewitt算子, 它的卷积因子如下:
其他计算 和sobel差不多;
Prewitt算子利用像素点上下、左右邻点灰度差,在边缘处达到极值检测边缘。对噪声具有平滑作用,定位精度不够高。
罗伯茨交叉边缘检测(Roberts Cross operator)
卷积因子如下:
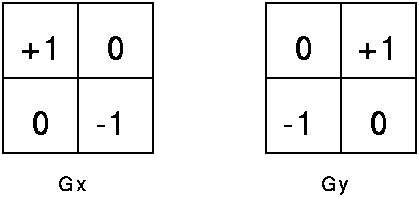
灰度公式为:
近似公式为:
具体计算如下:
G(x,y)=abs(f(x,y)-f(x+1,y+1))+abs(f(x,y+1)-f(x+1,y))
灰度方向 计算公式为:

Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感
其他边缘检测技术:
参考文章:
http://homepages.inf.ed.ac.uk/rbf/HIPR2/featops.htm
http://homepages.inf.ed.ac.uk/rbf/HIPR2/sobel.htm
Sobel边缘检测算法(转载)的更多相关文章
- 基于MATLAB的Sobel边缘检测算法实现
图像边缘就是图像灰度值突变的地方,也就是图像在该部分的像素值变化速度非常之快,就比如在坐标轴上一条曲线有刚开始的平滑突然来个大转弯,在变化出的导数非常大. Sobel算子主要用作边缘检测,它是一离散型 ...
- Sobel边缘检测算法
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值.在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量 Sobe ...
- 基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 【转】基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 基于Vivado HLS在zedboard中的Sobel滤波算法实现
基于Vivado HLS在zedboard中的Sobel滤波算法实现 平台:zedboard + Webcam 工具:g++4.6 + VIVADO HLS + XILINX EDK + ...
- 【算法随记】Canny边缘检测算法实现和优化分析。
以前的博文大部分都写的非常详细,有很多分析过程,不过写起来确实很累人,一般一篇好的文章要整理个三四天,但是,时间越来越紧张,后续的一些算法可能就以随记的方式,把实现过程的一些比较容易出错和有价值的细节 ...
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- <<一种基于δ函数的图象边缘检测算法>>一文算法的实现。
原始论文下载: 一种基于δ函数的图象边缘检测算法. 这篇论文读起来感觉不像现在的很多论文,废话一大堆,而是直入主题,反倒使人觉得文章的前后跳跃有点大,不过算法的原理已经讲的清晰了. 一.原理 ...
- 图像特征提取:Sobel边缘检测
前言 点和线是做图像分析时两个最重要的特征,而线条往往反映了物体的轮廓,对图像中边缘线的检测是图像分割与特征提取的基础.文章主要讨论两个实际工程中常用的边缘检测算法:Sobel边缘检测和Canny边缘 ...
随机推荐
- submit回车提交影响
$(".bInput").bind('keydown',function(event){//回车提交手动标签 if(event.keyCode==13){ ...
- S1:对象与JSON
JSON全称为JavaScript对象表示法(JavaScript Object Notation). JSON是JavaScript中对象的字面量,是对象的表示方法,通过使用JSON,可以减少中间变 ...
- js基础之arguments、css
arguments就是一个包含传入的参数的数组对象 栗子一: function sum(){ var result=0; for(var i=0;i<arguments.length;i++){ ...
- zatree第三方插件
Zabbix安装第三方插件zatree2.4.5 1.下载zatree第三方插件https://github.com/spide4k/zatree.git 2.检查PHP环境需要支持php-xml.p ...
- RM报表预览,只有固定的1个订单页面
明明选了多个记录,预览时,只显示最后一个. 原因: 主项数据的数据集选了报表自带的虚拟数据集了.
- C# 轉義字符
转义字符 意义 ASCII码值(十进制) \a 响铃(BEL) 007 \b 退格(BS) ,将当前位置移到前一列 008 \f 换页(FF),将当前位置移到下页开头 012 \n 换行(LF) ,将 ...
- vue js 用nodejs的依赖包 --2016-08-23
今天被nodejs包依赖坑了一下,上次上传的项目突然运行不起来了,原来是package.json中定义了使用最新版本的依赖,而最新版本有可能调整了结构或者改了api,比如vux把flexbox-it ...
- PowerShell并发控制-命令行参数之四问
传教士问: win下如何 获取进程命令行,及命令行参数? 传教士答: 可以用这个powershell命令(实际上是wmi查询): (get-wmiobject -query "select ...
- Oracle top N实现
在Oracle中实现select top N:由于Oracle不支持select top 语句,所以在Oracle中经常是用order by 跟rownum的组合来实现select top n的查询. ...
- c#读取文本文档实践1-File.ReadAllLines()
using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.I ...