从二叉查找树到平衡树:avl, 2-3树,左倾红黑树(含实现代码),传统红黑树
参考:自平衡二叉查找树 ,红黑树, 算法:理解红黑树 (英文pdf:红黑树)
目录
- 自平衡二叉树介绍
- avl树
- 2-3树
- LLRBT(Left-leaning red-black tree左倾红黑树 (代码见git)
- 2-3-4树和红黑树
- avl和红黑树的比较
自平衡二叉查找树
诞生的目的:
它是为了解决二叉查找树的查找时间复杂度最差是O(n)的问题而发明的数据结构。
完全二叉树的公式: n = 2h - 1
BST的查找运行时间和BST的高度有关。一个树的高度指的是从树的根开始所能到达的最长的路径长度。
如果按照从小到大的顺序输入一组key值,得到的将是一棵只有右子树的树。见下图。
如这个例子:
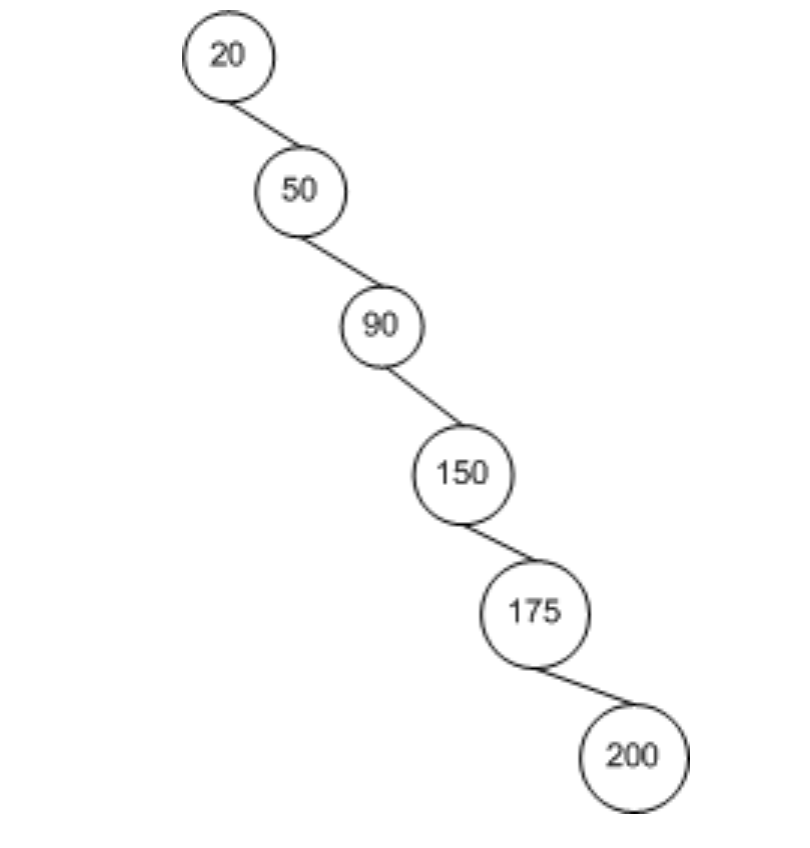
有6个节点,它的时间复杂度是O(n)。无论是新增,变更还是查找,删除,都需要诸葛对比key值。
假如要查找节点200,那么节点会比较5次,相当于遍历所有节点了。
这太浪费时间了,因此降低树的高度,就可以减少时间复杂度。
我们知道二叉搜索树的搜索节点的最小时间复杂度是 O(log2n)。因此找到一个高度和节点数量的最佳比例。让它的时间复杂度维持在O(log2n)。
期望是:
如果树中节点的数量为 n,则一棵满足O(log2n) 渐进运行时间的 BST 树的高度应接近于比 log2n 小的最大整数。
但实际问题是:
如何保证 BST 的拓扑结构始终保持树高度与节点数量的最佳比例?
因为 BST 的拓扑结构与节点的插入顺序息息相关,一种方式是通过数据的乱序来保证。所以必须在插入节点前就得到数据。
但是如果无法掌控数据的来源,怎么做?一种方案是新的节点插入不会打乱BST树的平衡。这种始终维持树的平衡状态的数据结构称为:自平衡二叉查找树。self-balancing binary search tree.
一棵平衡树
指的是树能够保持其高度与广度能够保持预先定义的比例。有许多种不同的自平衡 BST 数据结构,例如 AVL 树、红黑树(Red-Black Tree)、2-3 树、2-3-4 树、伸展树(Splay Tree)、B 树等等。
AVL树
1962年, 数学家发明的第一种自平衡二叉查找树,以其名字命名。它的平衡条件是,对每个节点n:
节点n的左子树的高度与右子树的高度差最多是1。即可以没有高度差,也可以高度差距1.
树的高度可递归性定义为:
- 如果节点n没有子节点,则它的高度为 0;
- 如果节点n只有一个子节点,则n的高度为该子节点的高度加 1;
- 如果节点n有两个子节点,则n的高度为两个子节点中高度较高的加 1;
- 如果节点没有子节点,无子节点侧的高度是-1。
例子:
下面有4个BST树,节点中的数代表节点的值,左右两侧的数代表左右子树的高度。a, b是AVL树,c,d不是,因为c/d不满足AVL的平衡条件。

当创建一棵 AVL 树时,难点在于如何保证 AVL 的平衡性质要求,而不用关注对树的具体操作。也就是说,无论是向树添加节点还是删除节点,最重要的事情就是保持树的平衡。
AVL 树通过 "旋转操作(rotations)" 来保持树的平衡。旋转操作可以重塑树的拓扑结构来恢复树的平衡,更重要的是,重塑后的树依然符合二叉查找树的性质要求。
当向一棵 AVL 树中插入一个新的节点时,需要经过两阶段的过程。
- 插入新节点的操作将使用与向 BST 树中插入新节点时使用的相同的查找算法。新的节点将做为一个叶子节点被添加到树中合适的位置,以满足 BST 的性质要求。在添加完节点后,将导致树的结构可能已经违背 AVL 树的性质要求。
- 在第二个阶段中,将遍历访问路径,来检查每个节点左右子树高度。如果存在某节点的左右子树的高度差大于 1 时,则需要使用旋转操作来处理。
例子:
有时除了像上图中描述的简单的旋转操作之外,可能还需要进行多次旋转操作。最重要的就是要意识到插入操作和删除操作都会破坏 AVL 树的平衡,而旋转操作就是解决这些问题的法宝。
通过确保所有节点的左右子树的差小于等于 1,AVL 树保证了插入、删除和查找操作将始终保持 O(log2n) 的渐进运行时间,而与插入或删除节点的顺序无关。
2-3树
2-3树是多叉树,它同样是一个平衡查找树。
二叉树中,每个节点最多只储存一个数据项的同时,最多也只有左右两条链接。而2-3树则不同:
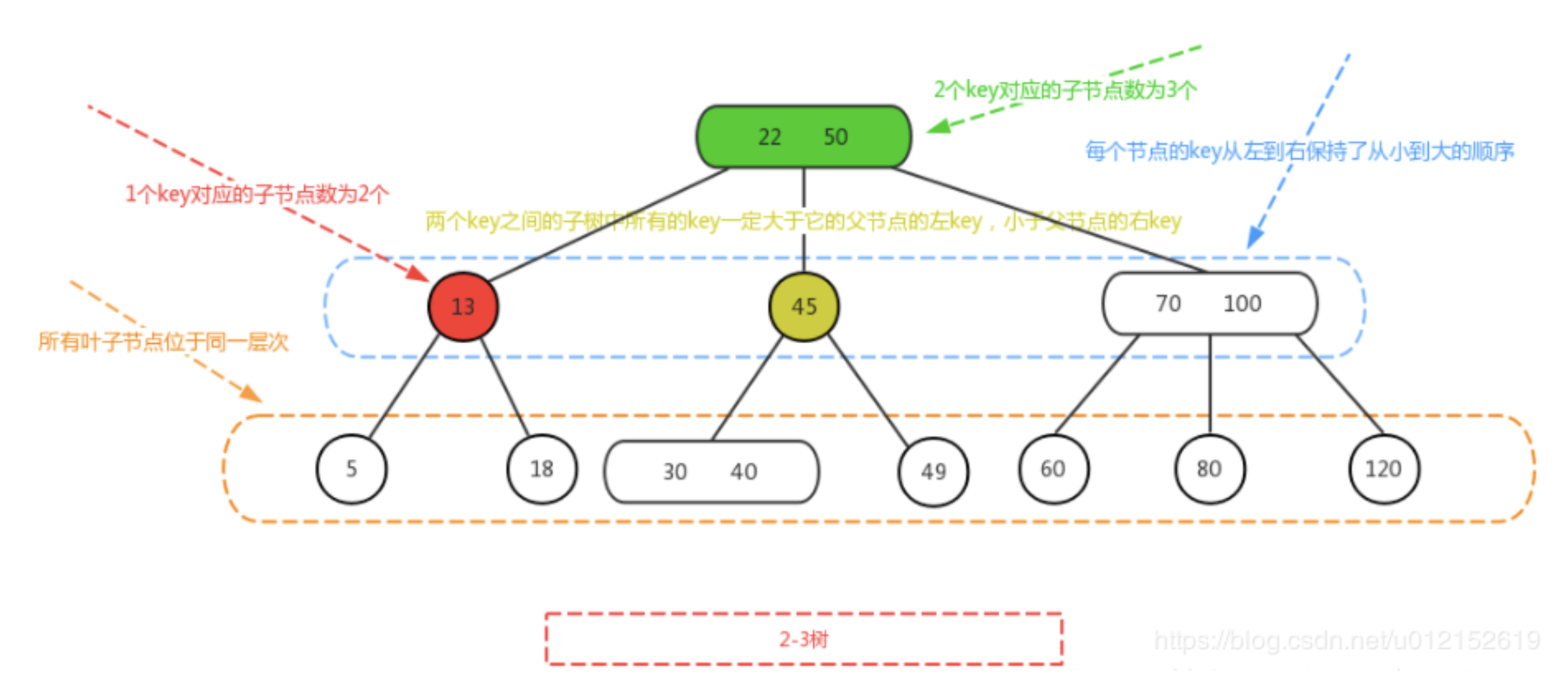
定义
2-3树是一个多叉树。一个节点可以保存1个或2个数据项。可以有0-3个子节点。
- 有一个数据项的节点必须有2个子节点。
- 有二个数据项的节点必须有3个子节点。
- 每个节点的数据项按照,数据项的key,从左到右保持从小到大的顺序。
- 两个key之间的子树的key的值,大于父节点左key,小于父节点的右key.
- 作为平衡树,所有从leaf到root的path的高度相同,因此所有的叶子节点都是位于同一层。
- ⚠️2-3树的节点分裂是:自底向上的(不能预分裂),而且2-3树节点分裂必须用到新数据项。
- 由1,2可知,除了叶节点不允许出现空节点。
时间复杂度:
- 在最坏的情况下,也就是所有的节点都是2-node节点,查找效率为lgN
- 在最好的情况下,所有的节点都是3-node节点,查找效率为log3N约等于0.631lgN
原理:
2-3树在插入key值的过程中会不断构建并分解3-key节点来保持树的平衡,因此在2-3树就可以避免二叉树的不平衡导致的效率低下的问题。

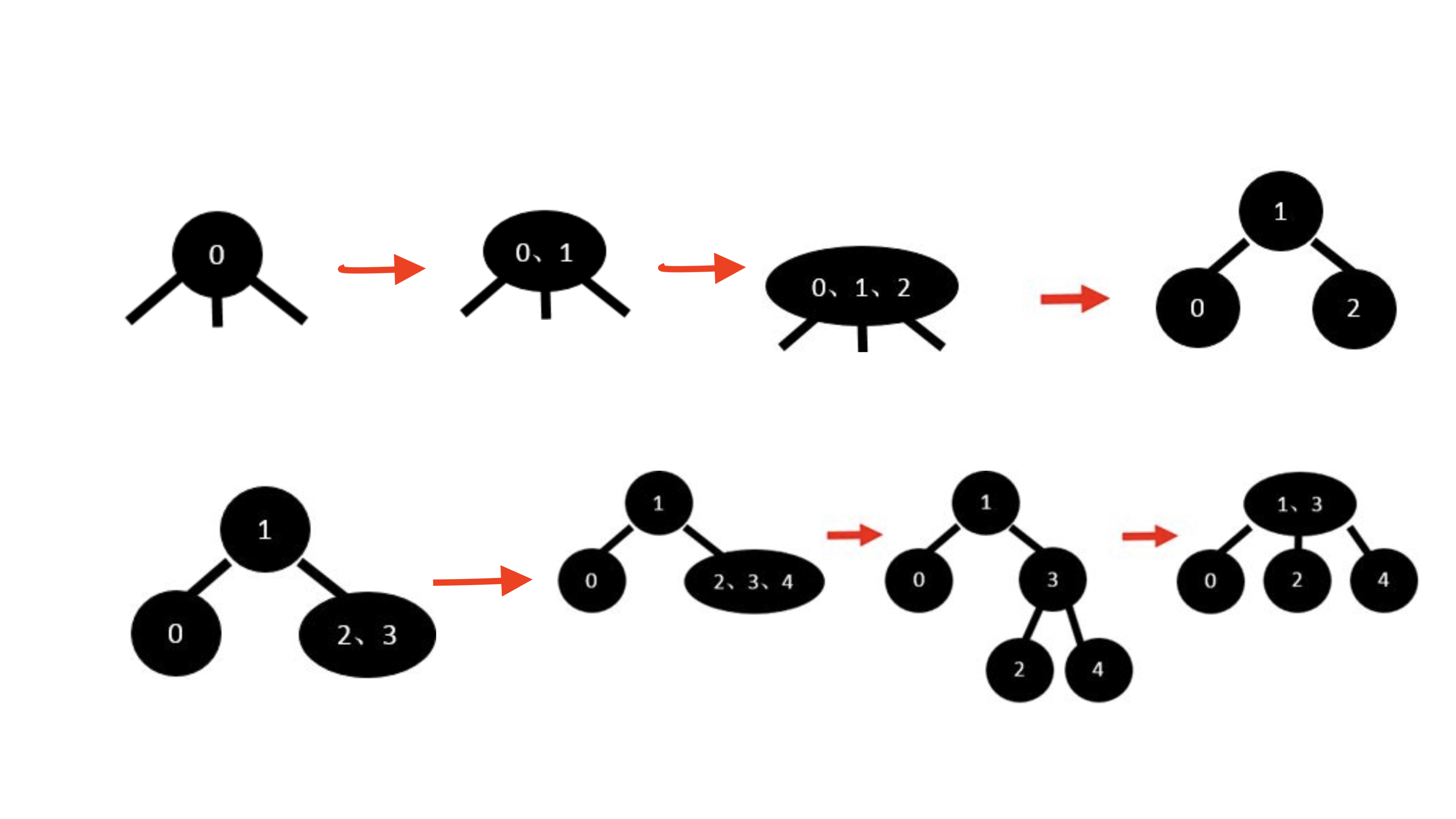
2-3树是自平衡的树,例如插入一组从小到大的key值的元素:
- 首先2-3树已经构建一个根节点
- 然后插入值为1的key。(⚠️2-3树允许一个节点储存两个key值)
- 插入2。成为了临时的3key节点,这是2-3树不允许的,需要分裂,并把1上传,形成二叉树结构。
- 插入3。⚠️这时的2-3树是左右平衡的。
- 再插入4。形成了3-key节点,需要分解它,并导致树的不平衡。(⚠️定义所有叶节点都在同一层)
- 重构,把节点3和节点1合并。成为一个2-3树。
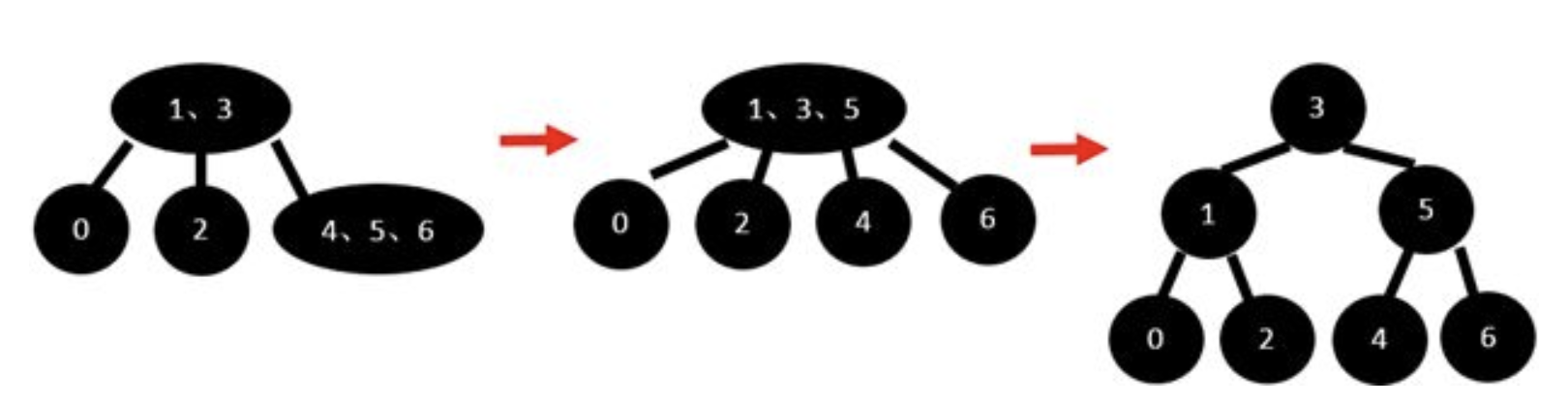
- 再插入5。然后插入6,形成一个3key节点。分解它,上传5节点。根节点形成3-key节点,树虽然平衡,但不符合2-3树的定义:每个节点最多有2个数据key。
- 分解root节点:最后的树是左右平衡的。
由此可知,2-3树可以避免二叉搜索树的不平衡导致的效率低下的问题。
总结-插入方法:
- 如果2-3树已存在当前插入的key,则插入失败,正确的插入一定是在叶子节点内插入。
- 如果等待插入的节点内只有一个节点,则直接插入。
- 如果等待插入的节点内有2个节点,插入后,需要对节点分裂。形成一个二叉树结构,然后将父节点再向上传递。
- 重复2和3的步骤,直到满足2-3树的定义。
删除方法:
比较复杂,未细看。参考:https://blog.csdn.net/u012152619/article/details/84332165
首先找到所在要删除的关键字(假设是K)所在的节点。
如果这个节点不是叶节点,就要找到中序排列时K后面的关键字所在的节点,这个节点一定是叶节点(因为它在右子树中是最小的)。然后交换这两个节点,那么所删除的关键字最终还是在一个叶节点中。
如果这个节点是叶节点,分叶节点和非叶节点,再根据key的数量分为4种:
- 1key的叶节点
- 2key的叶节点
- 1key的非叶节点
- 2key的非叶节点
下面从简单到复杂情况分析:
1. 如果删除的节点是2key的叶节点,只需删除目标key即可。2key叶节点变为1key叶节点,仍是2-3树。
10 10
/ \ => / \
4,6 18 4,x 18
2. 如果删除的节点属于2key非叶节点,则中序遍历找到待删除节点的后继节点,然后将后继节点和待删除节点位置交换。 此时问题转化为删除节点为叶子节点了。这时有2种情况:
- 待删除节点位于一个2-key叶节点内。删除方法见方法1。
10, 20 12,20
/ | \ => / | \
4 12, 15 25 4 x ,15 25
#直接删除10即可。
- 待删除节点是一个独立的叶子节点。 删除方法见
从二叉查找树到平衡树:avl, 2-3树,左倾红黑树(含实现代码),传统红黑树的更多相关文章
- 二叉查找树、平衡二叉树(AVL)、B+树、联合索引
1. [定义] 二叉排序树(二拆查找树)中,左子树都比节点小,右子树都比节点大,递归定义. [性能] 二叉排序树的性能取决于二叉树的层数 最好的情况是 O(logn),存在于完全二叉排序树情况下,其访 ...
- 有了二叉查找树、平衡树(AVL)为啥还需要红黑树?
序言 二叉查找树的缺点 平衡二叉树 虽然平衡树解决了二叉查找树退化为近似链表的缺点,能够把查找时间控制在 O(logn),不过却不是最佳的,因为平衡树要求每个节点的左子树和右子树的高度差至多等于1,这 ...
- Algorithms: 二叉平衡树(AVL)
二叉平衡树(AVL): 这个数据结构我在三月份学数据结构结构的时候遇到过.但当时没调通.也就没写下来.前几天要用的时候给调好了!详细AVL是什么,我就不介绍了,维基百科都有. 后面两月又要忙了. ...
- 平衡树初阶——AVL平衡二叉查找树+三大平衡树(Treap + Splay + SBT)模板【超详解】
平衡树初阶——AVL平衡二叉查找树 一.什么是二叉树 1. 什么是树. 计算机科学里面的树本质是一个树状图.树首先是一个有向无环图,由根节点指向子结点.但是不严格的说,我们也研究无向树.所谓无向树就是 ...
- (4) 二叉平衡树, AVL树
1.为什么要有平衡二叉树? 上一节我们讲了一般的二叉查找树, 其期望深度为O(log2n), 其各操作的时间复杂度O(log2n)同时也是由此决定的.但是在某些情况下(如在插入的序列是有序的时候), ...
- 树-二叉平衡树AVL
基本概念 AVL树:树中任何节点的两个子树的高度最大差别为1. AVL树的查找.插入和删除在平均和最坏情况下都是O(logn). AVL实现 AVL树的节点包括的几个组成对象: (01) key -- ...
- AVL排序二叉树树
AVL树第一部分,(插入) AVL树是一种自平衡二叉搜索树(BST),其中对于所有节点,左右子树的高度差不能超过1. 一个AVL树的示例 上面的树是AVL树,因为每个节点的左子树和右子树的高度之间的差 ...
- 二叉平衡树AVL的插入与删除(java实现)
二叉平衡树 全图基础解释参考链接:http://btechsmartclass.com/data_structures/avl-trees.html 二叉平衡树:https://www.cnblogs ...
- 【BZOJ】1146: [CTSC2008]网络管理Network(树链剖分+线段树套平衡树+二分 / dfs序+树状数组+主席树)
http://www.lydsy.com/JudgeOnline/problem.php?id=1146 第一种做法(时间太感人): 第二种做法(rank5,好开心) ================ ...
随机推荐
- 【无线安全实践入门】破解WiFi密码的多个方法
本文希望可以帮助到想要学习接触此方面.或兴趣使然的你,让你有个大概的印象. 文中可能存在错误操作或错误理解,望大家不吝指正. !阅前须知! 本文是基于我几年前的一本笔记本,上面记录了我学习网络基础时的 ...
- 函数节流之debounce
浏览器中某些计算和处理要比其他的昂贵很多.例如, DOM 操作比起非 DOM 交互需要更多的内存和 CPU 时间.连续尝试进行过多的 DOM 相关操作可能会导致浏览器挂起,有时候甚至会崩溃.尤其在 I ...
- docker-配置网桥-自定义网络
容器网络访问原理 桥接宿主机网络 临时生效: # 网桥名称 br_name=br0 # 添加网桥 brctl addbr $br_name # 给网桥设置IP ip addr add 192.168 ...
- tensorflow零起点快速入门(4) --入门常用API
tf.reduce_mean https://blog.csdn.net/he_min/article/details/78694383 计算均值,全部数字的均值,纵向一维的均值,横向一维的均值 tf ...
- 怎样通过id属性快速从HTMLCollection对象中获取到目标元素节点
方法1: 直接使用id或name属性: 比如我想获取 id 为 img1 的图片元素节点, 则可以这样写: document.images.img1 如果没有对应节点, 则返回undefined; 方 ...
- 13-Perl 子程序(函数)
1.Perl 子程序(函数)Perl 子程序也就是用户定义的函数.Perl 子程序即执行一个特殊任务的一段分离的代码,它可以使减少重复代码且使程序易读.Perl 子程序可以出现在程序的任何地方,语法格 ...
- 关闭钩子(shutdown hook)的作用以及在Tomcat中的使用
在很多实际应用环境中,当用户关了应用程序时,需要做一些善后清理工作,但问题是,用户有时并不会按照推荐的方法关闭应用程序,很有可能不做清理工作,例如在Tomcat的部署应用中,通过实例化一个Server ...
- python 小数精度控制
可以用:round(数值,保留小数位数) 详情参考 https://www.cnblogs.com/herbert/p/3402245.html
- [转载]flex中的正则表达式
原文:https://blog.csdn.net/hczhiyue/article/details/20483209 (1)单字符匹配* ‘x’ 匹配字符 x.* ‘.’ 匹配任意一个字符(字节),除 ...
- 谷歌浏览器禁用JS步骤
前奏: 当你想访问一个页面,因为不符合访问条件,而被JS阻拦:或者你打开的页面特效太多,干扰视线:亦或者JS的某个功能禁止了你的某些行为: 是不是很难受, 好办,咱给他禁了不就好啦,大胆地屏蔽它,不管 ...
- 二叉查找树、平衡二叉树(AVL)、B+树、联合索引