一文搞懂 SLAM 中的Extension Kalman Filter 算法编程
作者 | Doreen
01 问题描述
预先知道事物未来的状态总是很有价值的!
√ 预知台风的路线可以避免或减轻重大自然灾害的损失。
√ 敌国打过来的导弹,如果能够高精度预测轨迹,就能有效拦截。
√ 操控无人机,需要知道下一刻飞机的方向、速度不断修正,才能精准控制、回避各种风险。
这是一个状态估计问题
如下图所描绘的,在 k 个(一个或多个)时间点上,
基于初始的状态信息

一系列观测数据

给定控制输入

以及系统的运动和观测模型,力求预测系统在每一时刻的真实状态

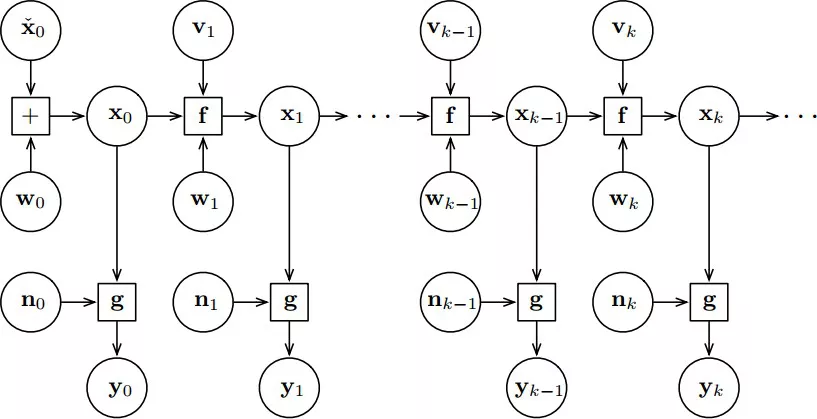
图 1.1: 状态估计问题示意图
以自动驾驶为例,图中符号的含义如下:
● xˇ: 设计的轨迹,比如预先计算得出的理想轨迹。
● w: 驾驶过程中各种操作引入的噪声,称为过程噪声。
● x: 在理想轨迹之上混入了过程噪声的真实轨迹。
● t 下标表示时间。
● n: 观测噪声。
● y: 观测数据:对真实轨迹的观测,其中包含观测噪声。
每一个 t − 1 时刻,系统处于

状态,输入控制信号

状态变为

这一过程用运动模型描述

此时观测到

这一个过程用观测模型描述

可以看出 t 时刻状态,在时间序列上只与 t − 1 时刻的状态有关,即具有一阶马尔科夫性。
02 EKF 算法
最开始人们对这一问题做了简化,假设模型是线性的,噪声符合高斯分布,提出了 Kalman Filter。然而总存在某些问题不符合线性与高斯假设,人们又继续探索。
2.1、Bayes Filter
由于系统状态与观测之间的因果关系,人们首先想到了贝叶斯定理。对于状态x, 由先验p(x), 后验概率 p(x|y), 推到观测对象发生的概率。
考虑到系统的马尔科夫性, t 时刻状态与 t − 1 时刻之前的状态和控制 输入都没有关系,忽略无关项,改写后如下。
2.2、算法改进
上述 Bayes Filter 是精确的模型,然而实际应用却有两个困难:
1.概率密度函数是个无穷维函数空间,需要无先的内存,置信度 p(xk|0, v1:k, y0:k) 需要近似。一般通过采样的方法解决。
2.由于积分的关系, 计算量会非常大, 一般通过将运动模型和观测模型 线性化来解决或通过蒙特卡洛积分。
有很多的科研成果聚焦在如何解决这两个问题, 代表性的如本文下面讨论 的 EKF, Particl Filter ,Sigmapoint Kalman Filter 等。另外在 Bayes Filter 近似算法中很重要一点是保持马尔科夫性。
2.3、EKF
EKF 在近似 Bayes Filter 的时候采用的近似方案是将模型线性化,假设噪声是高斯的。emmm, 捂脸,.... 说的就是因为模型非线性、噪声非高斯。
所以回到 Bayes Filter,然后 Bayes Filter 有难以克服的障碍,需要近似解,而解决方案绕一圈竟然又回到了线性高斯假设的原点,这是骗鬼呢么?
真的, 这就是著名的 EKF。在Kalman,1960发表了他的Kalman FIlter论文后, 他遇到了 NASA Ames Reserach Center 的 Stanley F.Schmidt,他们一起对 Kalman Filter 做了改进,最终应用在 NASA Apollo 项目的航空器轨迹估计上。看EKF曾经多么NB闪闪。
他们的改进主要集中在 3 个方面:
i 将原有的工作扩展到非线性模型和非高斯噪声领域。
ii 对当前最优解做线性化,以减轻非线性带来的影响。
iii 将原来的滤波器改造为现在标准的预测和校正两步。
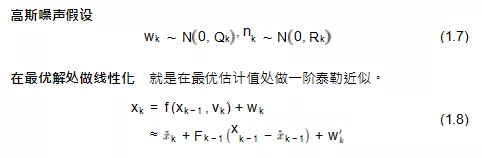
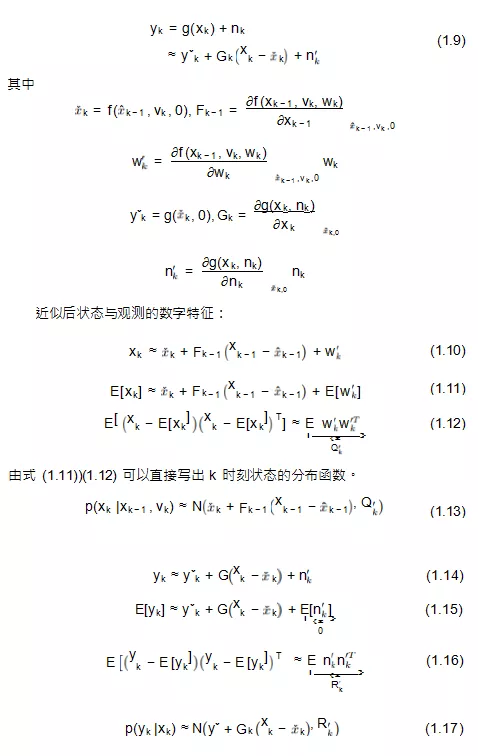
原来的 Bayes Filter 经过线性近似和高斯假设后变为:
可以看出公式 (1.18) 与公式 (1.6) 出发点是一样的, 只是 (1.18) 给出了可 性的均值方差求解公式。
对照公式 ((1.18)) 左右两边,可以得出:
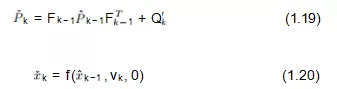
状态预测:
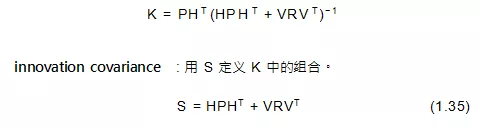
卡尔曼增益:

修正项
03 编程实现
3.1 几个重要的矩阵
本文只侧重 SLAM 中有关的应用。文末有示例代码链接。
首先简单介绍 EKF 中的几个重要矩阵。
3.2 系统状态矩阵 X
由机器人 robot 位姿和 n 个路标 landmank 的坐标组成的 (3 + 2 × n,1) 矩阵, 称为系统状态矩阵。
位移变量的单位可以是米或厘米,角度变量的单位是度或弧度。

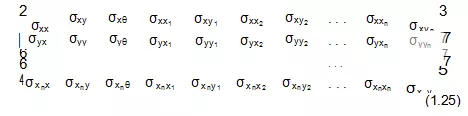
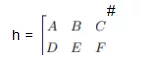
3.3 协方差矩阵 P
协方差矩阵 P 在 SLAM 中十分重要,描述了机器人位姿间的相关性,机器人位姿与路标间的相关性以及路标与路标间的相关性。P 是对称的。
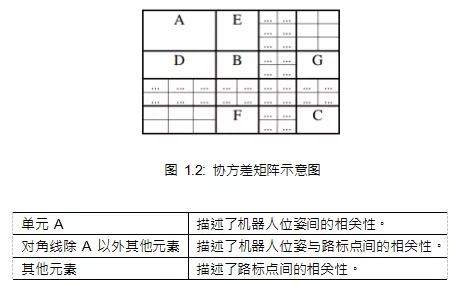
P 矩阵是对称的,E=D,F=G(代表了最后一个路标与第一个路标的协 方差项)。在增加新的路标点的时候,不仅要在对角线上增加各自的协方差项,还要增加与机器人的协方差项 (第一行、第一列),以及与其他路标的协方差项。
矩阵内容大致如下:
协方差矩阵最初如果没有观测到路标点,会只包含 A,随着新的路标点不断加入,维度会越来越大。
考虑到初始化的不确定性,即使机器人位姿是精确的,给 A 一个合适的初值也是明智的,反之可能会在求解过程中遇到一些问题。
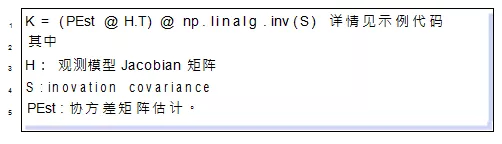
3.4 卡尔曼增益: K
卡尔曼增益供我们选择的机会,选择从观测路标点获取的信息和机器人自带的里程计信息哪个更可靠。

K 矩阵与状态矩阵是互相对应的,每一行代表一个状态变量。
第 1 行代表状态矩阵X第1行发生变化引起的增益,
其中

表示沿x轴位移引起的增益,

对应绕 x 轴旋转引起的增益。
第 2 行代表状态矩阵X第2行发生变化引起的增益,其中

表示沿y轴位移引起的增益,

对应绕y轴旋转引起的增益。
. . . 以此类推。
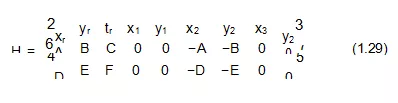
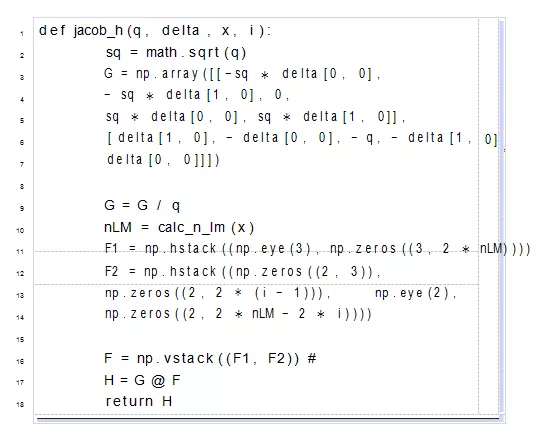
3.5 观测模型的 Jacobian 矩阵: H
机器人对路标点的观测可以表示为:

路标点坐标保存在系统状态矩阵里, 直接读取就可以:

观测模型的 Jacobian 矩阵: 路标观测向量对机器人状态估计值

的求导。

简化表示成如下形式:
具体的例子如:
如果观测的路标是

那么在

对应位置填上相反的值,

(路标没有旋转)
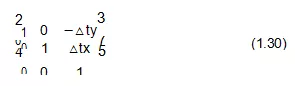
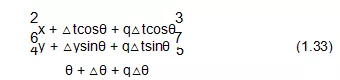
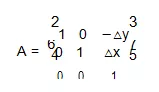
3.6 预测模型的 Jacobian 矩阵: A
预测模型:在给定机器人坐标和控制下预测机器人下一时刻将要到达的坐标。
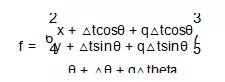
其中 (x, y) 表示当前机器人坐标,△t 表示驱动的增量,q 是误差项,f 对机器人参数求导:
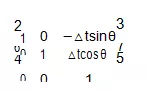
emmm …带 q 的误差那一被项被忽略掉了。用 △tcosθ 代替 △x,△tsinθ 代替 △y 就变成了
3.7 SLAM 中的 EKF 独有的 Jacobian
表达由机器人位置 (x, y) 引起的对路标预测误差误差

对路标的预测对路标坐标的 Jacobian

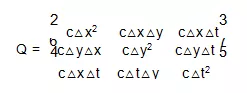
3.8 过程噪声 Q 和 W
过程噪声是与控制信号成比例的高斯噪声,记作 Q。如果
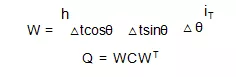
C 与里程计的准确性有关,准确性高对应的系数就大,通常是需要实验调参的。
3.9 测量噪声: R 和 V
观测噪声是与路标测量 (range,bearing)有关的 2×2 矩阵,
形如

其中 r 与 range 有关, c 是常数, 如果 range 误差 1cm, c 应该取值 0.01,表示高斯噪声方差。
如果 bearing 误差 1 度, b=1。
常数与测量设备的准确性有关。
有了上面几个关键矩阵的铺垫,下面终于 EKF 流程了:
3.10 使用里程计更新系统当前状态
更新的是状态矩阵 X(1.3.2) 前 3 个量
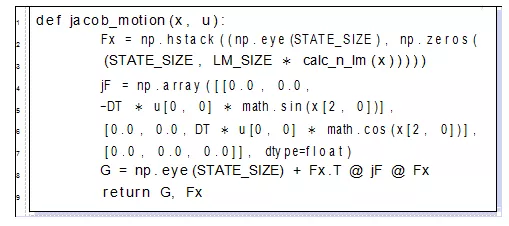
3.11 更新预测模型 Jacobian
3.12 更新过程噪声
过程噪声是与控制紧密相关的。
3.13 更新机器人位姿有关的协方差
(协方差矩阵顶部 3 × 3) 块。


3.14 用重新观测的路标数据更新当前状态
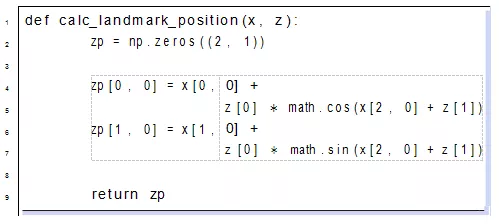
预测路标
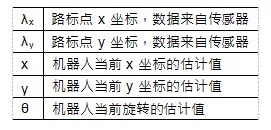
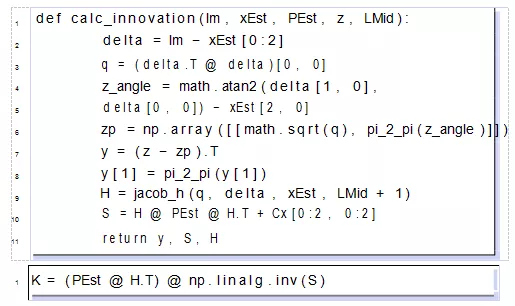
仅从机器人位置信息更新状态是不够准确的,还可以通过对路 标点的重新观测修正机器人位姿。对于机器人当前位姿 (x, y) 和上一时刻路 标坐标 (λx, λy) 可以计算距离和角度 h:
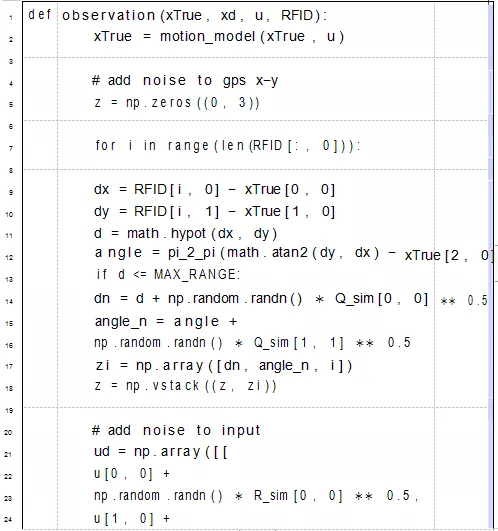
还可以直接通过传感器计算路标。
3.15 更新测量误差矩阵 R, V
其中 r = range, c = 0.01, bd = 1
3.16 计算 kalman 增益
3.17 新的状态向量

3.18 把新的路标加入状态
用新的路标点更新状态向量 X

3.19 更新协方差矩阵
更新协方差矩阵 P: 对角线元素

更新协方差矩阵 P: 机器人-路标相关元素

更新协方差矩阵 P:路标-机器人相关元素

更新协方差矩阵 P:路标-路标相关元素


3.20 实验结果
图中蓝色是理想轨迹,黑色是真实轨迹,红色是估计的结果。
04 源代码地址
h t t p s : / / g i t h u b . com/Hou−a l e x / p u b l i c S r c / b l o b /main/ ekf_slam . py
一文搞懂 SLAM 中的Extension Kalman Filter 算法编程的更多相关文章
- 一文搞懂 js 中的各种 for 循环的不同之处
一文搞懂 js 中的各种 for 循环的不同之处 See the Pen for...in vs for...of by xgqfrms (@xgqfrms) on CodePen. for &quo ...
- 一文搞懂--Java中重写equals方法为什么要重写hashcode方法?
Java中重写equals方法为什么要重写hashcode方法? 直接看下面的例子: 首先我们只重写equals()方法 public class Test { public static void ...
- 一文搞懂Python中的所有数组数据类型
关于我 一个有思想的程序猿,终身学习实践者,目前在一个创业团队任team lead,技术栈涉及Android.Python.Java和Go,这个也是我们团队的主要技术栈. Github:https:/ ...
- 一文搞懂 Java 中的枚举,写得非常好!
知识点 概念 enum的全称为 enumeration, 是 JDK 1.5 中引入的新特性. 在Java中,被 enum关键字修饰的类型就是枚举类型.形式如下: enum Color { RED, ...
- 一文搞懂js中的typeof用法
基础 typeof 运算符是 javascript 的基础知识点,尽管它存在一定的局限性(见下文),但在前端js的实际编码过程中,仍然是使用比较多的类型判断方式. 因此,掌握该运算符的特点,对于写出好 ...
- 一文搞懂│php 中的 DI 依赖注入
目录 什么是 DI / 依赖注入 依赖注入出现的原因 简单的依赖注入 高阶的依赖注入 依赖注入的应用 依赖注入高阶优化 什么是 DI / 依赖注入 依赖注入DI 其实本质上是指对类的依赖通过构造器完成 ...
- 一文搞懂│mysql 中的备份恢复、分区分表、主从复制、读写分离
目录 mysql 的备份和恢复 mysql 的分区分表 mysql 的主从复制读写分离 mysql 的备份和恢复 创建备份管理员 创建备份管理员,并授予管理员相应的权限 备份所需权限:select,r ...
- 一文彻底搞懂Java中的环境变量
一文搞懂Java环境变量 记得刚接触Java,第一件事就是配环境变量,作为一个初学者,只知道环境变量怎样配,在加上各种IDE使我们能方便的开发,而忽略了其本质的东西,只知其然不知其所以然,随着不断的深 ...
- 三文搞懂学会Docker容器技术(中)
接着上面一篇:三文搞懂学会Docker容器技术(上) 6,Docker容器 6.1 创建并启动容器 docker run [OPTIONS] IMAGE [COMMAND] [ARG...] --na ...
随机推荐
- 交换机基本原理与VRP基础及操作
交换机基本原理与VRP基础及操作 目录 交换机基本原理与VRP基础及操作 一.数据链路层 1.数据链路层的位置 2.数据链路层的功能 二.以太网(Ethernet) 1.以太网的概念 2.MAC地址( ...
- Spring 初始化流程
开始 在SpringIOC中,前面讲述了如何配置BeanDefinition和如何注册BeanDefinition,但是这些知识容器初始化的一部分,在AbstractApplicationContex ...
- HTTP缓存小结
介绍 提到页面优化,浏览器缓存必定是一个绕不过的话题,判断一个网站的性能最直观的就是看网页打开的速度,而提高网页反应速度的一个方式就是使用缓存.一个优秀的缓存策略可以缩短网页请求资源的距离,减少延迟, ...
- Linux上大文件切割以及批量并发处理
一.环境说明 某次项目需求中,在Linux上有批文本文件,文件文件都有几个G大,几千万行的数据.无论在Linux和Windows打开这么大的文件,基本上打开要卡半天,更别说编辑. 因此想到使用spli ...
- interface中setup_time和hold_time
interface中的setup_time和hold_time input:约束input信号提前T时间采样,然后在时钟沿更新到input信号上. output:约束output信号,在时钟沿T时间后 ...
- 使用 Spring Cloud Jaeger 进行分布式跟踪
在本文中,学习如何实现 Jaeger(基于 OpenTracing 和 Spring Boot 应用程序)以及如何使用 Jaeger UI 可视化跟踪. 介绍 在本文中,我们将探讨如何使用 Jaege ...
- Spring Cloud Alibaba Nacos 的 2 种健康检查机制!
Spring Cloud Alibaba Nacos 作为注册中心不止提供了服务注册和服务发现功能,它还提供了服务可用性监测的机制.有了此机制之后,Nacos 才能感知服务的健康状态,从而为服务调用者 ...
- k8s管理平台:rancher
简介 中文官网:https://docs.rancher.cn/ github:https://github.com/rancher/rancher 基础环境 https://www.cnblogs. ...
- awvas启动不起来解决方案
当双击桌面的"Acunetix图标",自动打开浏览器跳转页面,结果页面显示"无法访问此网站"按Windows+R键输入services.msc打开服务界面查看A ...
- 支持 dd 命令的简单的 GUI 实用程序
Kindd-支持 dd 命令的简单的 GUI 实用程序 "Kindd",一个属于dd 命令的图形化前端.它是自由开源的.用 Qt Quick 所写的工具.总的来说,这个工具对那些对 ...