Probabilistic PCA、Kernel PCA以及t-SNE
Probabilistic PCA
在之前的文章PCA与LDA介绍中介绍了PCA的基本原理,这一部分主要在此基础上进行扩展,在PCA中引入概率的元素,具体思路是对每个数据$\vec{x}_i$,假设$\vec{x}_{i} \sim N\left(W{\vec{z}_{i}}, \sigma^{2} I\right)$,其中$\vec{z}_{i}$是一个低维向量,它的先验分布满足$\vec{z}_{i} \sim N(0, I)$,$W$以及所有的$\vec{z}_i$均是要计算的量。$\sigma^2$可以为已知量,也可以作为未知量一同参与计算,这里为了简化计算过程,将$\sigma^2$作为已知量处理。Probabilistic PCA相对于PCA能够更好地处理数据中的噪音,具有更高的扩展性。接下来使用最大似然估计和EM算法对该问题进行求解,EM算法的详细介绍可参考文章EM算法和高斯混合模型GMM介绍。
矩阵$W$的最大似然估计值可以写为$$W_{\mathrm{ML}}=\arg \max _{W} \ln p\left(\vec{x}_{1}, \ldots, \vec{x}_{n} | W\right)=\arg \max _{W} \sum_{i=1}^{n} \ln p\left(\vec{x}_{i} | W\right)=\arg \max_{W} \sum_{i=1}^{n} \int q\left(\vec{z}_i\right) \ln p\left(\vec{x}_{i} | W\right) d \vec{z}_{i}$$将其写成EM算法可以求解的形式:$$\begin{aligned} \sum_{i=1}^{n} \int q\left(\vec{z}_i\right) \ln p\left(\vec{x}_{i} | W\right) d \vec{z}_{i} & = \sum_{i=1}^{n} \int q\left(\vec{z}_{i}\right) \ln \frac{p\left(\vec{x}_{i}, \vec{z}_{i} | W\right)}{q\left(\vec{z}_{i}\right)} d \vec{z}_{i} \quad \leftarrow \quad \mathcal{L} \\ &+\sum_{i=1}^{n} \int q\left(\vec{z}_{i}\right) \ln \frac{q\left(\vec{z}_{i}\right)}{p\left(\vec{z}_{i} | \vec{x}_{i}, W\right)} d \vec{z}_{i} \quad \leftarrow \mathrm{KL} \end{aligned}$$
E-step:令KL=0,即令$q_t\left(\vec{z}_{i}\right)$等于$p\left(\vec{z}_{i} | \vec{x}_{i}, W_t\right)$,根据贝叶斯定理,有公式$$p\left(\vec{z}_{i} | \vec{x}_{i}, W_t\right)=\frac{p(\vec{x}_i | \vec{z}_i,W_t) \cdot p(\vec{z}_i)}{\int p(\vec{x}_i | \vec{z}_i,W_t) \cdot p(\vec{z}_i) d\vec{z}_i}=N(\vec{\mu}_i^{(t)},C_{i}^{(t)})$$其中$p(\vec{z}_i)=N(0,I),\text{ }p(\vec{x}_i | \vec{z}_i,W_t)=N\left(W_t{\vec{z}_{i}}, \sigma^{2} I\right),\text{ }C_{i}^{(t)}=\left(I+W_t^{T} W_t / \sigma^{2}\right)^{-1},\text{ }\vec{\mu}_{i}^{(t)}=C_{i}^{(t)} W_t^{T} \vec{x}_{i} / \sigma^{2}$
M-step:更新$W$使得从E-step得到的目标函数$\mathcal{L}$最大化,$\mathcal{L}$可写为如下形式:$$\mathcal{L}= \sum_{i=1}^{n} \int q_t\left(\vec{z}_{i}\right) \ln \frac{p\left(\vec{x}_{i}, \vec{z}_{i} | W\right)}{q_t\left(\vec{z}_{i}\right)} d \vec{z}_{i}=\sum_{i=1}^{n} \int q_t\left(\vec{z}_{i}\right) [\ln p(\vec{z}_i) + \ln p(\vec{x}_i | \vec{z}_i,W) - \ln q_t\left(\vec{z}_{i}\right)] d \vec{z}_{i}$$由上述公式可以得到(省略了$\mathcal{L}$中的常数项):$$W_{t+1}=\arg\max_{W}\sum_{i=1}^{n} \int q_t\left(\vec{z}_{i}\right) \ln p(\vec{x}_i | \vec{z}_i,W) d \vec{z}_{i}=\left[\sum_{i=1}^{n} \vec{x}_{i} \vec{\mu}_{i}^{(t)T}\right]\left[\sigma^{2} I+\sum_{i=1}^{n}\left(\vec{\mu}_{i}^{(t)} \vec{\mu}_{i}^{(t)T}+C_{i}^{(t)}\right)\right]^{-1}$$
Iterate E-step以及M-step直到$\sum_{i=1}^{n} \ln p\left(\vec{x}_{i} | W\right)$的增加很少为止,此时得到的$W$以及$\vec{z}_i$的后验分布$p\left(\vec{z}_{i} | \vec{x}_{i}, W\right)$即是最终的结果。
Kernel PCA
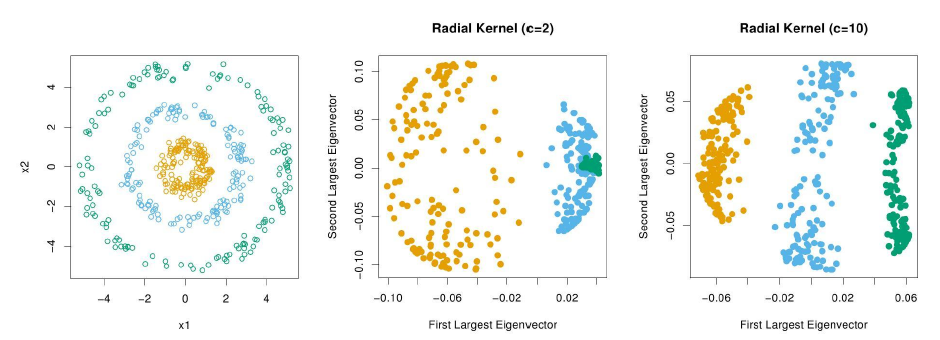
类似于Kernel SVM(参考文章支持向量机SVM介绍),Kernel PCA在PCA的基础上引入了核的思想,即先对数据集$X$进行非线性的特征变换,映射到更高维的空间中,获取关于数据的更多信息,再从高维空间上使用PCA降维,去除数据的冗余特征。由文章PCA与LDA介绍可知PCA的求解过程就是求解协方差矩阵$Q=\tilde{X}^{T} \tilde{X}$的特征值和单位特征向量。假设特征变换函数为$\vec{\phi}(\vec{x})=\left[\begin{array} {c} {\phi_1(\vec{x})} & {\phi_2(\vec{x})} & {\cdots} & {\phi_P(\vec{x})}\end{array}\right]^T$,则经过特征变换后的协方差矩阵的形式为$$Q_{K}=\sum_{i=1}^n[\vec{\phi}(\vec{x}_i)-\vec{\mu}_K][\vec{\phi}(\vec{x}_i)-\vec{\mu}_K]^T=\sum_{i=1}^n\vec{\psi}(\vec{x}_i)\vec{\psi}(\vec{x}_i)^T,\text{ where }\vec{\mu}_K=\frac{\sum_{i=1}^n\vec{\phi}(\vec{x}_i)}{n}$$矩阵$Q_K$的特征值和单位特征向量可写为$\sum_{i=1}^n\vec{\psi}(\vec{x}_i)[\vec{\psi}(\vec{x}_i)^T\vec{p}]=\lambda\vec{p}$,将$\vec{p}$的形式改写为$$\vec{p}=\sum_{i=1}^na_i\vec{\psi}(\vec{x}_i),\text{ where }a_i=\frac{\vec{\psi}(\vec{x}_i)^T\vec{p}}{\lambda}$$将该形式重新带入特征值和特征向量的公式:$$\sum_{i=1}^{n} \vec{\psi}\left(\vec{x}_{i}\right) \sum_{j=1}^{n} a_{j} \underbrace{\vec{\psi}\left(\vec{x}_{i}\right)^{T} \vec{\psi}\left(\vec{x}_{j}\right)}_{=\bar{K}_{ij}}=\lambda \sum_{j=1}^{n} a_{j} \vec{\psi}\left(\vec{x}_{j}\right)$$其中$\bar{K}$表示中心化的核矩阵。将上式两边同时左乘向量$ \vec{\psi}\left(\vec{x}_{l}\right)^T$,有$\sum_{j=1}^{n}[\sum_{i=1}^n\bar{K}_{li}\bar{K}_{ij}]a_j=\lambda\sum_{j=1}^n\bar{K}_{lj}a_j$。令$l=1,2,\cdots,n$,可以看出$\bar{K}^2\vec{a}=\lambda\bar{K}\vec{a}$,即$$\bar{K}\vec{a}=\lambda\vec{a},\text{ where }\vec{a}=\left[\begin{array} {c} a_1 & a_2 & {\cdots} & a_n\end{array}\right]^T \text{ is the eigenvector of }\bar{K}$$总结一下上述过程,即通过求解中心化的核矩阵$\bar{K}$的特征值$\lambda$和特征向量$\vec{a}$,得到经过特征变换后的协方差矩阵$Q_K$的特征值$\lambda$以及特征向量$\vec{p}=\sum_{i=1}^na_i\vec{\psi}(\vec{x}_i)$。另外由于$\vec{p}$为单位向量,$\vec{a}$需满足$\vec{p}^T\vec{p}=\sum_{i=1}^n\sum_{j=1}^na_i\vec{\psi}\left(\vec{x}_{i}\right)^{T} \vec{\psi}\left(\vec{x}_{j}\right)a_j=\vec{a}^T\bar{K}\vec{a}=\lambda\vec{a}^T\vec{a}=1$。
因此Kernel PCA的求解就转化为了两个问题的求解:求解中心化的核矩阵$\bar{K}$以及求解数据在$\vec{p}$上的投影(即坐标值):
- 假设使用高斯核函数,则核矩阵$K$中的元素$K_{ij}=\vec{\phi}\left(\vec{x}_{i}\right)^{T} \vec{\phi}\left(\vec{x}_{j}\right)=kernel(\vec{x}_i,\vec{x}_j)= \exp \left(-\frac{\left\|\vec{x}_{i}-\vec{x}_{j}\right\|^{2}}{c}\right)$,有公式$$\bar{K}_{ij}=K_{ij}-\frac{1}{n}\sum_{m=1}^nK_{mj}-\frac{1}{n}\sum_{m=1}^nK_{im}+\frac{1}{n^2}\sum_{s=1}^n\sum_{t=1}^nK_{st}$$转化为矩阵形式,可以得到$$\bar{K}=K-\frac{1}{n}IK-\frac{1}{n}KI+\frac{1}{n^2}IKI,\text{ where }I_{ij}=1,i\in\{1,2,\cdots,n\},j\in\{1,2,\cdots,n\}$$
- 数据$\vec{x}$在$\vec{p}$上的投影可以表示为$\vec{\phi}(\vec{x})^T\vec{p}=\sum_{i=1}^na_i[\vec{\phi}(\vec{x})^T\vec{\phi}(\vec{x}_i)-\frac{1}{n}\sum_{j=1}^n\vec{\phi}(\vec{x})^T\vec{\phi}(\vec{x}_j)]$。由$a_i=\frac{\vec{\psi}(\vec{x}_i)^T\vec{p}}{\lambda}$可知$\sum_{i=1}^na_i=0$,投影可表示为$\sum_{i=1}^na_i\vec{\phi}(\vec{x})^T\vec{\phi}(\vec{x}_i)$。若$\vec{x}=\vec{x}_m,\text{ }m\in\{1,2,\cdots,n\}$,则上述投影变为$\sum_{i=1}^na_iK_{mi}$;若$\vec{x}$为新的数据,则上述投影可写为$\sum_{i=1}^na_i\exp \left(-\frac{\left\|\vec{x}-\vec{x}_{i}\right\|^{2}}{c}\right)$
实际计算中通常先将数据集$X$进行标准化,再按照上述这些步骤进行计算,需要注意的是标准化后的$X$经过特征变换后的特征均值不一定仍为0,即$\frac{\sum_{i=1}^n\vec{\phi}(\vec{x}_i)}{n}\neq\vec{0}$。
t-SNE
相比于PCA等降维算法,t-SNE(t-distributed stochastic neighbor embedding)的一个主要优点是在从高维到低维的映射中尽可能保留了数据集的局地结构,即在高维空间相似的两个数据点,映射到低维空间也是相似的。
高维空间的相似性
常规的做法是用欧式距离表示这种相似性,而t-SNE使用高斯分布在高维空间中把这种距离关系转换为条件概率来表示相似性:$$p_{j | i}=\frac{\exp \left(-\left\|\vec{x}_{j}-\vec{x}_{i}\right\|^{2} / 2 \sigma_{i}^{2}\right)}{\sum_{k \neq i} \exp \left(-\left\|\vec{x}_{k}-\vec{x}_{i}\right\|^{2} / 2 \sigma_{i}^{2}\right)}$$针对方差$\sigma_{i}^{2}$的确定,首先提前给定perpexility的值,由信息论可知:$$perpexility=2^{H_i}=2^{-\sum_{j \neq i}p_{j | i}\log_2 p_{j | i}},\text{ where }H_i \text{ is the entropy of distribution } p(\cdot | i)$$通过上述公式求得对应的$\sigma_{i}^{2}$,给定的perpexility越小,求得的方差也越小。在t-SNE中可以将perpexility等价地看作每个点的邻近点个数,一般来说比较合理的取值区间为[5, 50]。此外,使用$p(i | j)$的一个问题是它不是对称的,即$p_{i | j} \neq p_{j | i}$,为了能得到一个更加通用的联合概率分布,使得$p_{ij}=p_{ji}$,定义$p_{i j}=\frac{p_{j | i}+p_{i | j}}{2 n},\text{ }p_{ii}=0$。
高维向低维的映射
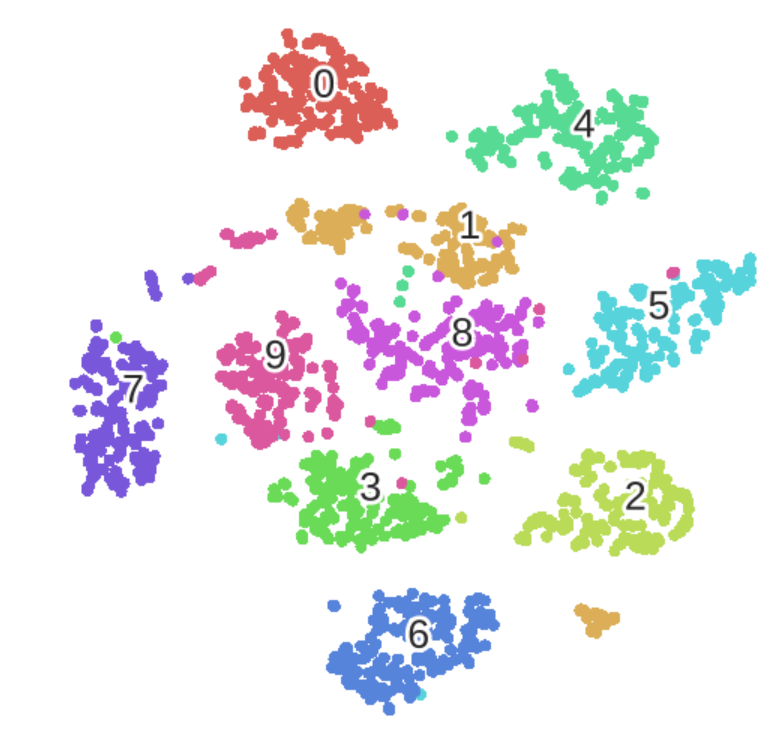
为了解决高维数据集映射到低维后产生的拥挤问题(The Crowding Problem),在低维空间中选择长尾的$t$分布(通常令自由度为1,即柯西分布)来度量相似性:$$q_{i j}=\frac{\left(1+\left\|\vec{y}_{i}-\vec{y}_{j}\right\|^{2}\right)^{-1}}{\sum_{k \neq l}\left(1+\left\|\vec{y}_{k}-\vec{y}_{l}\right\|^{2}\right)^{-1}}$$利用KL散度来衡量高维和低维两个分布的相似性,即$$C=K L(P \| Q)=\sum_{i} \sum_{j} p_{i j} \log \frac{p_{i j}}{q_{i j}}$$为了求得低维空间中的$\vec{y}_i,\text{ }i=1,2,\cdots,n$,采用梯度下降法求解$C$的最小值,梯度公式如下:$$\frac{\partial C}{\partial \vec{y}_{i}}=4 \sum_{j}\left(p_{i j}-q_{i j}\right)\left(\vec{y}_{i}-\vec{y}_{j}\right)\left(1+\left\|\vec{y}_{i}-\vec{y}_{j}\right\|^{2}\right)^{-1}$$值得注意的一点是最终在低维空间上求得的数据集,它的不同集群之间的距离并没有实际意义,因为对$t$分布来说,超出一定距离范围以后,其相似度都是很小的;另外t-SNE不适合用来寻找离群点,因为使用对称的$p_{ij}$相当于无形之中拉近了集群和离群点之间的距离。下图表示在MNIST数据集上使用t-SNE进行可视化的结果:
参考资料
针对t-SNE更详细的介绍和应用可以参考以下文章
- 从SNE到t-SNE再到LargeVis
- t-SNE使用过程中的一些坑
- How to Use t-SNE Effectively
- TSNE: T-Distributed Stochastic Neighborhood Embedding (State of the art)
Probabilistic PCA、Kernel PCA以及t-SNE的更多相关文章
- Kernel Methods (5) Kernel PCA
先看一眼PCA与KPCA的可视化区别: 在PCA算法是怎么跟协方差矩阵/特征值/特征向量勾搭起来的?里已经推导过PCA算法的小半部分原理. 本文假设你已经知道了PCA算法的基本原理和步骤. 从原始输入 ...
- Kernel PCA 原理和演示
Kernel PCA 原理和演示 主成份(Principal Component Analysis)分析是降维(Dimension Reduction)的重要手段.每一个主成分都是数据在某一个方向上的 ...
- 【模式识别与机器学习】——PCA与Kernel PCA介绍与对比
PCA与Kernel PCA介绍与对比 1. 理论介绍 PCA:是常用的提取数据的手段,其功能为提取主成分(主要信息),摒弃冗余信息(次要信息),从而得到压缩后的数据,实现维度的下降.其设想通过投影矩 ...
- Robust De-noising by Kernel PCA
目录 引 主要内容 Takahashi T, Kurita T. Robust De-noising by Kernel PCA[C]. international conference on art ...
- Kernel PCA and De-Noisingin Feature Spaces
目录 引 主要内容 Kernel PCA and De-Noisingin Feature Spaces 引 kernel PCA通过\(k(x,y)\)隐式地将样本由输入空间映射到高维空间\(F\) ...
- A ROBUST KERNEL PCA ALGORITHM
目录 引 主要内容 问题一 问题二 Lu C, Zhang T, Du X, et al. A robust kernel PCA algorithm[C]. international confer ...
- Kernel PCA for Novelty Detection
目录 引 主要内容 的选择 数值实验 矩形框 spiral 代码 Hoffmann H. Kernel PCA for novelty detection[J]. Pattern Recognitio ...
- Missing Data in Kernel PCA
目录 引 主要内容 关于缺失数据的导数 附录 极大似然估计 代码 Sanguinetti G, Lawrence N D. Missing data in kernel PCA[J]. europea ...
- 核PCA与PCA的精髓和核函数的映射实质
1.PCA简介 遭遇维度危机的时候,进行特征选择有两种方法,即特征选择和特征抽取.特征选择即经过某种法则直接扔掉某些特征,特征抽取即利用映射的方法,将高维度的样本映射至低维度.PCA(或者K-L变换) ...
随机推荐
- Ethical Hacking - Web Penetration Testing(10)
SQL INJECTION SQLMAP Tool designed to exploit SQL injections. Works with many DB types, MySQL, MSSQL ...
- C++ 深搜调错
因为前两天某网站的比赛一个深搜错了,我只得了3等奖,我找不到错误,给别的大佬看他们又嫌恶心.emm……,比赛结束后我自己反思了一下,深搜写错了该怎么办,或者说怎样避免写错. 首先,变量名不要太ex,比 ...
- 设计模式:decade模式
目的:为系统中的一组联动接口提供一个高层次的接口,从而降低系统的复杂性 优点:使用窗口模式可以使得接口变少 继承关系图: 例子: class Subsystem1 { public: void Ope ...
- ThreadLocal源码分析以及why导致内存泄露
1 ThreadLocal? This class provides thread-local variables. These variables differ from their normal ...
- 像计算机科学家一样思考Python(第2版)|百度网盘免费下载|Python新手入门资料
像计算机科学家一样思考Python(第2版)|百度网盘免费下载 提取码:01ou 内容简介 · · · · · · 本书以培养读者以计算机科学家一样的思维方式来理解Python语言编程.贯穿全书的主 ...
- Nginx安全优化与性能调优
目录 Nginx基本安全优化 隐藏Nginx软件版本号信息 更改源码隐藏Nginx软件名及版本号 修改Nginx服务的默认用户 修改参数优化Nginx服务性能 优化Nginx服务的worker进程数 ...
- 谁来教我渗透测试——VMware工具安装和使用
今天我们继续渗透测试学习系列了,昨天我们看了基础概念,今天我们来学习一下渗透测试必备的功能VMware安装. 首先我们下载好VMware workstation Pro的安装包.可以在百度上直接百度下 ...
- Centos 7下编译安装Nginx
一.下载源代码 百度云网盘下载地址:https://pan.baidu.com/s/19MQODvofRNnLV9hdAT-R6w 提取码:zi0u 二.安装依赖及插件 yum -y install ...
- Bug--WARN Please initialize the log4j system properly.
log4j:WARN No appenders could be found for logger (org.apache.ibatis.logging.LogFactory). log4j:WARN ...
- js控制语句练习(回顾)
1.一个小球从100米空中落下,每次反弹一半高度,小球总共经过多少米,请问第10次反弹的高度是多少? //定义初始下落过程高度 var sum1= 0; //定义初始上升高度 var sum2= 0; ...