OpenCV中基于HOG特征的行人检测
目前基于机器学习方法的行人检测的主流特征描述子之一是HOG(Histogram of Oriented Gradient, 方向梯度直方图)。HOG特征是用于目标检测的特征描述子,它通过计算和统计图像局部区域的梯度方向直方图来构成特征,用这些特征描述原始图像。
HOG的核心思想是所检测的局部物体外形能够被光强梯度或边缘方向的分布所描述。通过将整幅图像分割成小的连接区域(称为cells),每个cell生成一个方向梯度直方图或者cell中pixel的边缘方向,这些直方图的组合可表示出(所检测目标的目标)描述子。
为改善准确率,局部直方图可以通过计算图像中一个较大区域(称为block)的光强作为measure被对比标准化,然后用这个值(measure)归一化这个block中的所有cells.这个归一化过程完成了更好的照射/阴影不变性。与其他描述子相比,HOG得到的描述子保持了几何和光学转化不变性(除非物体方向改变)。因此HOG描述子尤其适合人的检测。
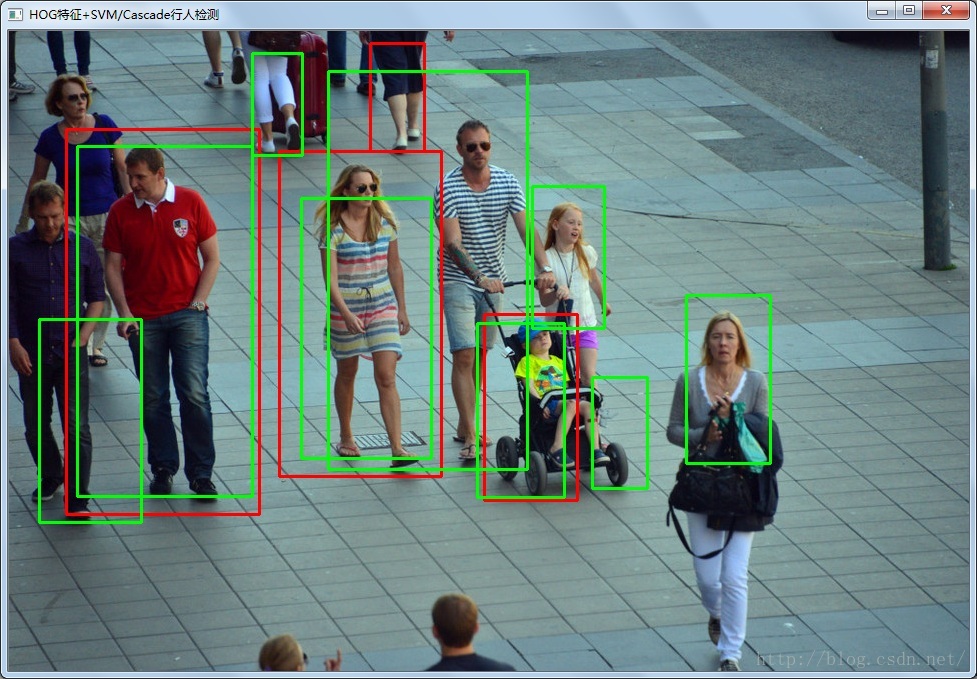
OpenCV实现了两种类型的基于HOG特征的行人检测,分别是SVM和Cascade,下边这个小程序是这两种分类器的简单使用。OpenCV自带的级联分类器的文件的位置在“XX\opencv\sources\data\hogcascades”
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/objdetect/objdetect.hpp>
#include <opencv2/ml/ml.hpp>
#include <Windows.h>
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("E:\\Picture\\person01.jpg",1);
vector<Rect> personSVM, personCasc,personListSVM, personListCacs;//检测结果矩形框向量
DWORD SVMTimeBegin,SVMTimeEnd,CascTimeBegin,CascTimeEnd; //耗时统计
//方法1,Hog+svm
SVMTimeBegin = GetTickCount();
HOGDescriptor hog;//HOG特征检测器
hog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector());//设置SVM分类器为默认参数
hog.detectMultiScale(src, personSVM, 0, Size(2,2), Size(0,0), 1.05, 2);//对图像进行多尺度检测
SVMTimeEnd=GetTickCount();
cout<<"HOG+SVM行人检测耗时:\n"<<(SVMTimeEnd-SVMTimeBegin)<<endl;
//方法2.Hog+cascade
CascTimeBegin=GetTickCount();
CascadeClassifier *cascade = new CascadeClassifier;
cascade->load("D:\\ProgramFilesD\\opencv\\sources\\data\\hogcascades\\hogcascade_pedestrians.xml");
cascade->detectMultiScale(src, personCasc);
CascTimeEnd=GetTickCount();
cout<<"HOG+Cascade行人检测耗时:\n"<<(CascTimeEnd-CascTimeBegin)<<endl;
//不重合的直接放入List,重合的选取最外侧结果
for(int i=0; i < personSVM.size(); i++)
{
Rect r = personSVM[i];
int j=0;
for(; j < personSVM.size(); j++)
if(j != i && (r & personSVM[j]) == r)
break;
if( j == personSVM.size())
personListSVM.push_back(r);
}
for(int i=0; i < personCasc.size(); i++)
{
Rect r = personCasc[i];
int j=0;
for(; j < personCasc.size(); j++)
if(j != i && (r & personCasc[j]) == r)
break;
if( j == personCasc.size())
personListCacs.push_back(r);
}
//画矩形框,缩放检测到的矩形框
for(int i=0; i<personListSVM.size(); i++)
{
Rect r = personListSVM[i];
r.x += cvRound(r.width*0.1);
r.width = cvRound(r.width*0.8);
r.y += cvRound(r.height*0.07);
r.height = cvRound(r.height*0.8);
rectangle(src, r.tl(), r.br(), Scalar(0,0,255), 2);
}
for(int i=0; i<personListCacs.size(); i++)
{
Rect r = personListCacs[i];
r.x += cvRound(r.width*0.1);
r.width = cvRound(r.width*0.8);
r.y += cvRound(r.height*0.07);
r.height = cvRound(r.height*0.8);
rectangle(src, r.tl(), r.br(), Scalar(0,255,0), 2);
}
imshow("HOG特征+SVM/Cascade行人检测",src);
waitKey();
return 0;
} SVM和Cascade的检测结果分别用红色和蓝色矩形框标注,检测结果:

OpenCV中基于HOG特征的行人检测的更多相关文章
- opencv+树莓PI的基于HOG特征的行人检测
树莓PI远程控制摄像头请参考前文:http://www.cnblogs.com/yuliyang/p/3561209.html 参考:http://answers.opencv.org/questio ...
- OpenCV中基于Haar特征和级联分类器的人脸检测
使用机器学习的方法进行人脸检测的第一步需要训练人脸分类器,这是一个耗时耗力的过程,需要收集大量的正负样本,并且样本质量的好坏对结果影响巨大,如果样本没有处理好,再优秀的机器学习分类算法都是零. 今年3 ...
- Opencv学习之路—Opencv下基于HOG特征的KNN算法分类训练
在计算机视觉研究当中,HOG算法和LBP算法算是基础算法,但是却十分重要.后期很多图像特征提取的算法都是基于HOG和LBP,所以了解和掌握HOG,是学习计算机视觉的前提和基础. HOG算法的原理很多资 ...
- 基于Haar特征Adaboost人脸检测级联分类
基于Haar特征Adaboost人脸检测级联分类 基于Haar特征Adaboost人脸检测级联分类,称haar分类器. 通过这个算法的名字,我们能够看到这个算法事实上包括了几个关键点:Haar特征.A ...
- 利用HOG+SVM实现行人检测
利用HOG+SVM实现行人检测 很久以前做的行人检测,现在稍加温习,上传记录一下. 首先解析视频,提取视频的每一帧形成图片存到磁盘.代码如下 import os import cv2 videos_s ...
- 基于HOG特征的Adaboost行人检测
原地址:http://blog.csdn.net/van_ruin/article/details/9166591 .方向梯度直方图(Histogramof Oriented Gradient, HO ...
- Hog SVM 车辆 行人检测
HOG SVM 车辆检测 近期需要对卡口车辆的车脸进行检测,首先选用一个常规的检测方法即是hog特征与SVM,Hog特征是由dalal在2005年提出的用于道路中行人检测的方法,并且取的了不错的识别效 ...
- [OpenCV-Python] OpenCV 中计算摄影学 部分 IX 对象检测 部分 X
部分 IX计算摄影学 OpenCV-Python 中文教程(搬运)目录 49 图像去噪目标 • 学习使用非局部平均值去噪算法去除图像中的噪音 • 学习函数 cv2.fastNlMeansDenoisi ...
- 基于虚拟数据的行人检测研究(Expecting the Unexpected: Training Detectors for Unusual Pedestrians with Adversarial Imposters)
Paper Link : https://arxiv.org/pdf/1703.06283 Github: https://github.com/huangshiyu13/RPNplus 摘要: 这篇 ...
随机推荐
- 搭建MHA问题汇总
1,Can't exec "mysqlbinlog": No such file or directory at /usr/share/perl5/vendor_perl/MHA/ ...
- percona-toolkit源码编译安装
安装依赖软件yum install perl-ExtUtils-CBuilder perl-ExtUtils-MakeMakeryum install perl-Time-HiRes perl-DB ...
- 向 Windows 高级用户进阶,这 10 款效率工具帮你开路 | 新手问号
原文地址:https://sspai.com/post/41411 编注:「新手问号」是少数派的一个全新栏目.它面向完全「零基础」的新手用户,通过最简单易懂的方式,帮助你快速掌握关于系统和软硬件的入门 ...
- sed学习总结
sed学习总结 sed工作流 测试文件:cat employee.txt 101,John Doe,CEO 102,Jason Smith,IT Manager 103,Raj Reddy,Sysad ...
- SAP ABAP编程 字符串加密-MD5_CALCULATE_HASH_FOR_CHAR
DATA: str1 TYPE c LENGTH 12 VALUE 'zxcv', str2 TYPE c LENGTH 32, str3 TYPE c LENGTH 32. ...
- Qt5 编译 & 打包依赖dll发布
十年前学C++的时候,无聊到把windows 文件夹下几乎所有的*.dll 都看过一遍.偶尔在程序运行时看到缺少 *.dll 的提示,都会直接找出来解决. 随着“开发平台”和“编译器”版本的逐年升级, ...
- 小梦词典WP8.1应用发布
这几天一直在做这款应用,今天终于发布了! 小梦词典简介: 小梦词典是一款永久免费无广告的网络词典. 支持英汉单词查询: 支持中,英,法,韩,德,俄,日七国语言翻译,多语言极致体验: 支持生词本记忆,查 ...
- 【u211】编码
Time Limit: 1 second Memory Limit: 128 MB [问题描述] 假设phi(W)得到是按照以下算法编码后的结果: 1. 如果W的长度为1那么phi(W)即为W: 2. ...
- Linux下使用Python的Tkinter库出现的No module named _tkinter问题
这是由于python的版本没有包含tkinter的模块,只需要把tk的package安装就可以了. 一般在linux才出现,windows版本一般已经包含了tkinter模块.
- 真机测试时出现 could not find developer disk image问题
解决Xcode在ipad/iphone 系统真机测试时出现could not find developer disk image问题 原因:手机系统版本比xcode版本高,sdk不支持 方法:更新Xc ...