中文NER的那些事儿5. Transformer相对位置编码&TENER代码实现
这一章我们主要关注transformer在序列标注任务上的应用,作为2017年后最热的模型结构之一,在序列标注任务上原生transformer的表现并不尽如人意,效果比bilstm还要差不少,这背后有哪些原因? 解决这些问题后在NER任务上transformer的效果如何?完整代码详见ChineseNER
Transformer水土不服的原因
Hang(2019)在TENER的论文中给出了两点原因
1. 三角函数绝对位置编码只考虑距离没有考虑方向
2. 距离表达在向量project以后也会消失
我们先来回顾下原生Transformer的绝对位置编码, 最初编码的设计是为了满足几个条件
- 每个绝对位置应该有独一无二的位置表征
- 相对位置表征应该和绝对位置无关以及句子长度无关
- 编码可以泛化到训练样本之外的句子长度
于是便有了基于三角函数的编码方式,在pos位置,维度是\(d_k\)的编码中,第i个元素的计算如下
\begin{cases}
sin(w_k \cdot pos)& \text{if i=2k}\\
cos(w_k \cdot pos),& \text{if i=2k+1}
\end{cases}
\]
\]
基于三角函数的绝对位置编码是常数,并不随模型更新。在Transformer中,位置编码会直接加在词向量上,输入的词向量Embedding是E,在self-attention中Q,K进行线性变换后计算attention,对value进行加权得到输出如下
q_i &= (E_i+P_i) \dot W_q^T \\
k_j &= (E_j+P_j) \dot W_k^T \\
v_j &= (E_j+P_j) \dot W_v^T \\
a_{i,j} &= softmax(q_ik_j/\sqrt{d_k}) \\
output &= \sum_{j}v_j * a_{i,j}\\
\end{align}
\]
我们来对\(q_ik_j\)部分进行展开可以得到
q_ik_ j&=E_iW_qW_K^TE_j^T(语义交互)+ P_iW_qW_K^TP_j^T (位置交互)\\
& + P_iW_qW_K^TE_j^T(query语义*key位置) + E_iW_qW_K^TP_j^T(key语义*query位置) \\
\end{align}
\]
其中位置交互是唯一可能包含相对位置信息的部分,如果不考虑线性变换\(w_k\),\(w_q\)只看三角函数位置编码,会发现位置编码内积是相对距离的函数,如下
P_iP_j^T & = P_iP_{i+\Delta}^T \\
& = \sum_{k=0}^{d_k/2-1}sin(w_k \cdot i)sin(w_k \cdot (i+\Delta)) + cos(w_k \cdot i )cos(w_k \cdot (i+\Delta))\\
& = \sum_{k=0}^{d_k/2-1}cos(w_k \cdot(i-(i+\Delta))) =\sum_{k=0}^{d_k/2-1} cos(w_k \cdot \Delta)
\end{align}
\]
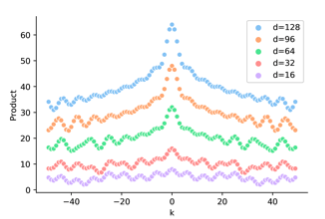
不同维度\(d_k\),\(P_iP_j^T\)和\(\Delta\)的关系如下,会发现位置编码内积是对称并不包含方向信息,而BiLSTM是可以通过双向LSTM引入方向信息的。对于需要全局信息的任务例如翻译,sentiment analysis,方向信息可能并不十分重要,但对于局部优化的NER任务,因为需要判断每个token的类型,方向信息的缺失影响更大。
看完三角函数部分,我们把线性变换加上,下图是加入随机线性变换后\(P_iw_iw_j^TP_j^T\)和\(\Delta\)的关系,会发现位置编码的相对距离感知消失了,有人会问那这位置编码有啥用,这是加了个寂寞???

个人感觉上图的效果是加入随机变换得到,而\(W_i,W_j\)本身是trainable的,所以如果相对距离信息有用,\(W_iW_j^T\)未必学不到,这里直接用随机\(W_i\)感觉并不完全合理。But Anyway这两点确实部分解释了原生transformer在NER任务上效果打不过BiLSTM的原因。下面我们来看下基于绝对位置编码的缺陷,都有哪些改良
相对位置编码
既然相对位置信息是在self-attention中丢失的,最直观的方案就是显式的在self-attention中把相对位置信息加回来。相对位置编码有很多种构建方案,这里我们只回顾TENER之前相对经典的两种(这里参考了苏神的让研究人员绞尽脑汁的Transformer位置编码再一次膜拜大神~)。为了方便对比,我们把经典的绝对位置编码计算的self-attenion展开再写一遍
q_ik_ j&=E_iW_qW_K^TE_j^T + P_iW_qW_K^TP_j^T + P_iW_qW_K^TE_j^T + E_iW_qW_K^TP_j^T \\
a_{i,j} &= softmax(q_ik_j/\sqrt{d_k}) \\
output &= \sum_{j}v_j * a_{i,j}\\
\end{align}
\]
RPR
(shaw et al,2018) 提出的RPR可以说是相对位置编码的起源,计算也最简单,只保留了以上Attention的语义交互部分,把key的绝对位置编码,替换成key&Query的相对位置编码,同时在对value加权时也同时引入相对位置,得到如下
q_ik_ j&=E_iW_qW_K^TE_j^T(语义交互)+ E_iW_qR_{ij}^T(相对位置att语义) \\
output &= \sum_{j}v_j * (a_{i,j} + R_{ij})\\
\end{align}
\]
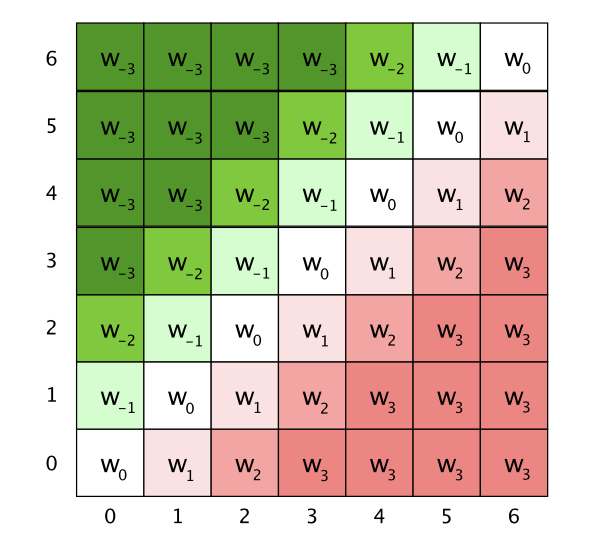
这里\(R_{ij}\)是query第i个字符和key/value第j个字符之间的相对距离j-i的位置编码,query第2个字符和key第4个字符交互对应\(R_{-2}\)的位置编码。这样的编码方式直接考虑了距离和方向信息。
这里的位置编码PE是trainable的变量,为了控制模型参数的大小,同时保证位置编码可以generalize到任意文本长度,对相对位置做了截断,毕竟当前字符确实不太可能和距离太远的字符之前存在上下文交互,所以滑动窗口的设计也很合理。如果截断长度为k,位置编码PE的dim=2k+1,下图是k=3的\(R_{ij}\)
\]
Transformer-XL/XLNET
(Dai et al,2019)在Transformer-XL中给出了一种新的相对位置编码,几乎是和经典的绝对位置编码一一对应。
- 把key的绝对位置编码\(p_j\)替换成相对位置编码\(R_{ij}\)
- 把query的绝对位置编码\(W_ip_i\),替换成learnable的两个变量u和v,分别学习key的语义bias和相对位置bias,就得到了如下的attention计算,
q_ik_ j&=E_iW_qW_K^TE_j^T(语义交互)+ E_iW_qR_{ij}^TW_R^T(相对位置att语义)\\
&+ uE_jW_k(全局语义bias) + vR_{ij}W_R(全局位置bias)
\end{align}
\]
以上计算方案也被XLNET沿用,和RPR相比,Transfromer-XL
- 只在attention计算中加入相对位置编码,在对value加权时并没有使用,之后相对位置的改良基本都只针对attention部分
- PE沿用了三角函数而非trainable变量,所以不需要截断k=max_seq_len。不过加了线性变换\(W_R\)来保留灵活性,且和绝对位置编码不同的是,位置编码和语义用不同的W来做线性变换
- 加入了全局语义bias和全局位置bias,和绝对位置编码相比每个term都有了明确的含义
TENER:相对位置编码的NER模型
TENER是transformer在NER任务上的模型尝试,文章没有太多的亮点,更像是一篇用更合适的方法来解决问题的工程paper。沿用了Transformer-XL的相对位置编码, 做了两点调整,一个是key本身不做project,另一个就是在attention加权时没用对attenion进行scale, 也就是以下的归一化不再用\(\sqrt{d_k}\)对query和key的权重进行调整,得到的attenion会更加sharp。这个调整可以让权重更多focus在每个词的周边范围,更适用于局部建模的NER任务。
\]
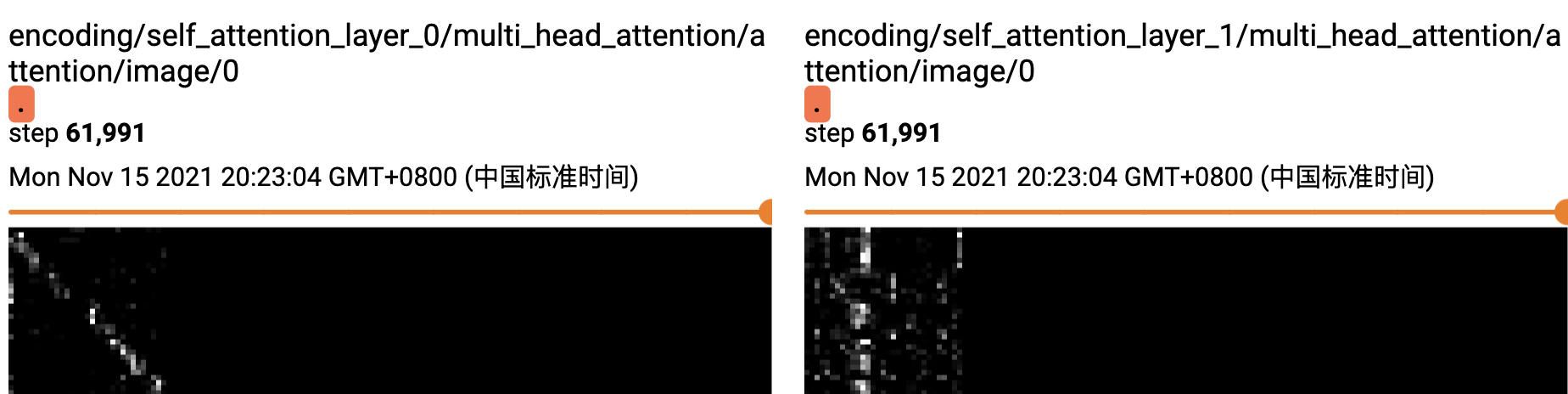
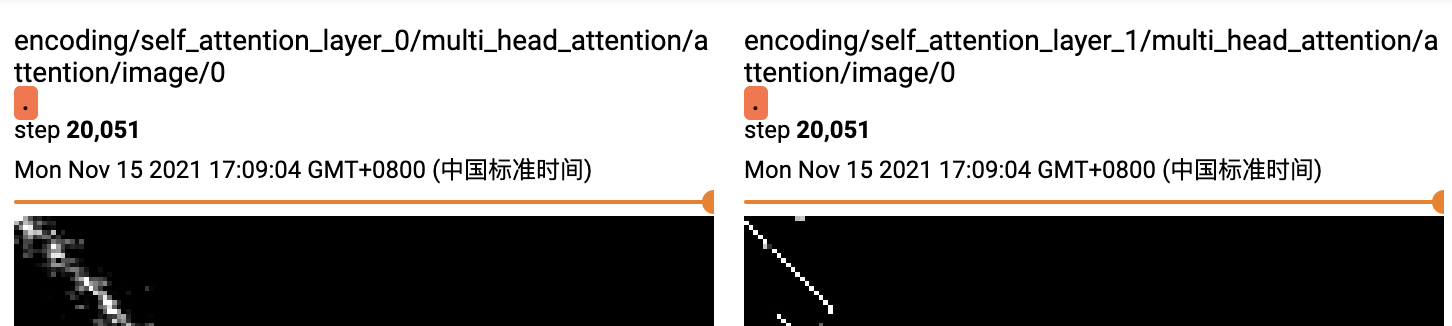
我们来直观对比下,同样的数据集和模型参数。绝对位置编码和unscale的相对位置编码attention的差异,这里都用了两层的transformer,上图是绝对位置编码,下图是unscale的相对位置编码。可以明显看到unscale的相对位置编码的权重,在第一层已经学习到部分周围信息后,第二层的attention范围进一步缩小集中在词周围(一定程度上说明可能1层transfromer就够用了),而绝对位置编码则相对分散在整个文本域。
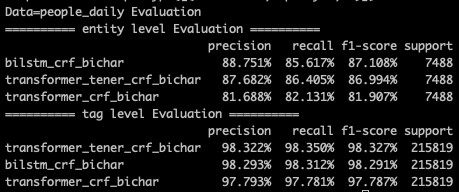
下面来对比下效果,transformer任务默认都是用的bichar输入,所以我们也和bilstm_bichar进行对比,在原paper中作者除了对句子部分使用transformer来提取信息,还在token粒度做了一层transformer,不过这里为了更公平的和bilstm对比,我们只保留了句子层面的transformer。以下是分别在MSRA和PeopleDaily两个任务上的效果对比。
只是把绝对位置编码替换成相对位置编码,在两个任务上都有4~5%的效果提升,最终效果也基本和bilstm一致。这里没做啥hyper search,参数给的比较小,整体上transformer任务扩大embedding,ffnsize效果会再有提升~

REF
- TENER: Adapting Transformer Encoder for Named Entity Recognition, 2019, Hang Yan
- Self-attention with relative position represen- tations
- Transformer-XL: Attentive Language Models Beyond a Fixed-Length Context
- XLNet: Generalized Autoregressive Pretraining for Language Understanding
- 苏剑林. (Feb. 03, 2021). 《让研究人员绞尽脑汁的Transformer位置编码 》[Blog post]. Retrieved from https://kexue.fm/archives/8130
- 工业界求解NER问题的12条黄金法则
中文NER的那些事儿5. Transformer相对位置编码&TENER代码实现的更多相关文章
- 中文NER的那些事儿1. Bert-Bilstm-CRF基线模型详解&代码实现
这个系列我们来聊聊序列标注中的中文实体识别问题,第一章让我们从当前比较通用的基准模型Bert+Bilstm+CRF说起,看看这个模型已经解决了哪些问题还有哪些问题待解决.以下模型实现和评估脚本,详见 ...
- 中文NER的那些事儿3. SoftLexicon等词汇增强详解&代码实现
前两章我们分别介绍了NER的基线模型Bert-Bilstm-crf, 以及多任务和对抗学习在解决词边界和跨领域迁移的解决方案.这一章我们就词汇增强这个中文NER的核心问题之一来看看都有哪些解决方案.以 ...
- 中文NER的那些事儿4. 数据增强在NER的尝试
这一章我们不聊模型来聊聊数据,解决实际问题时90%的时间其实都是在和数据作斗争,于是无标注,弱标注,少标注,半标注对应的各类解决方案可谓是百花齐放.在第二章我们也尝试通过多目标对抗学习的方式引入额外的 ...
- 中文NER的那些事儿2. 多任务,对抗迁移学习详解&代码实现
第一章我们简单了解了NER任务和基线模型Bert-Bilstm-CRF基线模型详解&代码实现,这一章按解决问题的方法来划分,我们聊聊多任务学习,和对抗迁移学习是如何优化实体识别中边界模糊,垂直 ...
- # 中文NER的那些事儿6. NER新范式!你问我答之MRC
就像Transformer带火了"XX is all you need"的论文起名大法,最近也看到了好多"Unified XX Framework for XX" ...
- [NLP] 相对位置编码(一) Relative Position Representatitons (RPR) - Transformer
对于Transformer模型的positional encoding,最初在Attention is all you need的文章中提出的是进行绝对位置编码,之后Shaw在2018年的文章中提出了 ...
- 采用Google预训bert实现中文NER任务
本博文介绍用Google pre-training的bert(Bidirectional Encoder Representational from Transformers)做中文NER(Name ...
- python在WIN下CMD运行中文乱码及python 2.x python 3.x编码问题
在CMD中运行python代码时,我们会发现,即使在代码中加入# -*- coding:utf-8 -*- 这段代码,中文仍然会乱码.如下: # -*- coding:utf-8 -*- conten ...
- ICCV2021 | Vision Transformer中相对位置编码的反思与改进
前言 在计算机视觉中,相对位置编码的有效性还没有得到很好的研究,甚至仍然存在争议,本文分析了相对位置编码中的几个关键因素,提出了一种新的针对2D图像的相对位置编码方法,称为图像RPE(IRPE). ...
随机推荐
- 2017年第二届广东省强网杯线上赛WEB:Musee de X writeup(模板注入漏洞)
目录 解题思路 总结 解题思路 拿到手上,有四个页面 首先按照题目要求执行,尝试注册一个名为admin的账户 这种情况,路径都给出来了,很可能就是目录遍历或者文件上传了 回到初始界面,点击链接here ...
- 洛谷3163 CQOI2014危桥 (最大流)
一开始想了一发费用流做法然后直接出负环了 首先,比较显然的思路就是对于原图中没有限制的边,对应的流量就是\(inf\),如果是危桥,那么流量就应该是\(2\). 由于存在两个起始点,我们考虑直接\(s ...
- captcha_trainer 验证码识别-训练 使用记录
captcha_trainer 验证码识别-训练 使用记录 在爬数据的时候,网站出现了验证码,那么我们就得去识别验证码了.目前有两种方案 接入打码平台(花钱,慢) 自己训练(费时,需要GPU环境,快) ...
- Bootstrap移动端导航(简易)
效果 在线查看 代码少,都在HTML里 <!DOCTYPE html> <html lang="en"> <head> <meta cha ...
- JavaCPP快速入门(官方demo增强版)
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...
- 测试小姐姐问我 gRPC 怎么用,我直接把这篇文章甩给了她
原文链接: 测试小姐姐问我 gRPC 怎么用,我直接把这篇文章甩给了她 上篇文章 gRPC,爆赞 直接爆了,内容主要包括:简单的 gRPC 服务,流处理模式,验证器,Token 认证和证书认证. 在多 ...
- C/C++ 数据类型 表示最大 最小数值 探讨
C/C++中存储数字格式有整型和浮点型 字符型数据本质上也是以整型存储 整型 对于整型数据,最大值最小值很好计算 先确定对应数据型在本地所占用的字节数,同一数据型由于系统或者编译器的不同,所占字节不同 ...
- Prometheus基于文件的服务发现
Prometheus基于文件的服务发现 一.基于文件的服务发现 1.prometheus.yml 配置文件的写法 2.file_sd 目录下的文件 3.配置结果 二.注意事项 三.参考链接 一.基于文 ...
- Linux下Zabbix5.0 LTS监控基础原理及安装部署(图文教程)
Zabbix 是什么? zabbix 是一个基于 Web 界面的提供分布式系统监视以及网络监视功能的企业级的开源解决方案.通过 C/S 模式采集数据,通过 B/S 模式在 Web 端展示和配置,能监视 ...
- Linux过来人帮你理清学习思路
很多同学接触linux不多,对linux平台的开发更是一无所知. 而现在的趋势越来越表明,作为一个优秀的软件开发人员,或计算机it行业从业人员,="" 掌握linux是一种很重要的 ...