ROS2学习之旅(12)——创建工作空间
workspace(工作空间)是包含ROS2 packages(包)的文件夹。在使用ROS 2之前,有必要在终端中source一下ROS 2的安装工作区,这样就可以在该终端中使用ROS 2的软件包。
还可以source一个“overlay”(一个次级工作区,在这里可以添加新的包,而不会干扰正在扩展的现有ROS 2工作区),或者“underlay”。underlay必须包含overlay中所有包的依赖关系。overlay中的包将覆盖underlay中的包,也可以有多个overlay和underlay,每个连续的overlay使用其父underlay的包。
1.Source ROS2环境
在本例中,主要的ROS2的安装文件为underlay(请记住,一个underlay不一定是主要的ROS2安装文件)。
将ROS2添加到环境变量中,可以参考:配置ROS2环境
2.创建一个新文件夹
在工程项目中最好的做法就是,为每个新工作空间创建一个新文件夹。名称并不重要,但是用它来表示工作区的用途是很有帮助的。创建文件夹名为dev_ws(development workspace):
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
另一个实践经验是将工作空间中的任何包放到src目录下。上面的代码在dev_ws中创建了一个src目录,然后进入其中。
3.Clone一个简单项目
现在使用来自ros_tutorials存储库(repo)中现有的包对工作空间进行了解,以后会创建自己的包。
在dev_ws/src目录下,执行以下命令:
git clone https://github.com/ros/ros_tutorials.git -b foxy-devel
现在工作空间中克隆了ros_tutorials,查看dev_ws/src的内容,将看到新的ros_tutorials目录。
要查看ros_tutorials中的包,输入以下命令:
ls ros_tutorials
终端返回:
roscpp_tutorials rospy_tutorials ros_tutorials turtlesim
忽略前三个包,turtlesim是这个仓库中唯一一个真正的ROS2包。
现在已经使用示例包填充了工作区,但它还不是功能齐全的工作空间,需要首先解析依赖项并编译工作空间。
4.解析依赖
在编译工作空间之前,需要解析包依赖项。可能已经拥有了所有依赖项,但是实践经验告诉我们最好是在每次克隆时检查依赖项。这样不会在长时间的等待之后,由于缺少依赖项而导致编译失败。
在工作空间空间(dev_ws)的根目录下,运行以下命令:
rosdep install -i --from-path src --rosdistro foxy -y
如果已经拥有了所有依赖项,控制台将返回:
#All required rosdeps installed successfully
包在package.xml文件中声明它们的依赖关系,此命令遍历这些声明,并安装缺少的依赖。
5.使用colcon编译工作空间
在工作空间的根目录下(dev_ws),可以使用以下命令编译包:
colcon build
此时,终端返回:
Starting >>> turtlesim
[Processing: turtlesim]
Finished <<< turtlesim [50.5s]
Summary: 1 package finished [50.7s]
注意:
colcon build有许多有用的参数:
--packages-up-to构建你想要的包,加上它的所有依赖项,但不是整个工作空间(节省时间)--symlink-install使你在每次调整python脚本时都不必重新编译--event-handlers console_direct+在编译时显示控制台输出(同样可以在log目录中找到)
一旦编译完成,在工作空间根目录(~/dev_ws)下输入ls(显示所有内容),会发现colcon创建了新的文件夹:
build install log src
install目录里面包含工作空间的配置文件,可以使用它来source ‘overlay’。
6.source overlay
在source overlay之前,打开一个新的终端,与编译工作空间的终端分开,这是非常重要的。在编译的同一终端中source overlay,或者类似地在已经source overlay的终端中编译,这可能会产生复杂的问题。
在新终端中,将ROS 2环境作为“underlay”,这样就可以在它之上构建“overlay”:
source /opt/ros/foxy/setup.bash
找到工作空间根目录:
cd ~/dev_ws
在根目录下,source overlay:
. install/local_setup.bash
注意:
source overlay的local_setup仅仅将overlay中可用的包添加到环境中,setup则将overlay和underlay一起添加到环境中,可以同时利用这两个工作空间。
所以,source ROS2的安装目录的setup,然后source dev_ws中的overlay的local_setup,与直接source dev_ws中的setup是一样的,因为它包含了underlay。
现在可以在overlay环境中,运行turtlesim:
ros2 run turtlesim turtlesim_node
但是怎么才能知道这是运行的overlay turtlesim,而不是主安装的turlesim ?
可以在overlay中修改turtlesim,这样就可以看到效果了:
可以在overlay中修改和重建包(与underlay区分)。
overlay优先于underlay。
7.修改overlay
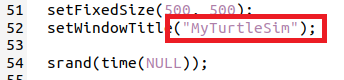
可以通过编辑turtlesim窗口的标题栏来修改overlay。为此,在~/dev_ws/src/ros_tutorials/turtlesim/src中找到turtle_frame.cpp文件。使用文本编辑器打开turtle_frame.cpp。
在52行,可以看到函数setWindowTitle("TurtleSim");,将TurtleSim修改为MyturtleSim,并保存,然后使用colcon build重新编译。
返回到第二个终端(source overlay的)并再次运行turtlesim:
ros2 run turtlesim turtlesim_node
将会看到turtlesim窗口的标题栏现在显示为“MyTurtleSim”。
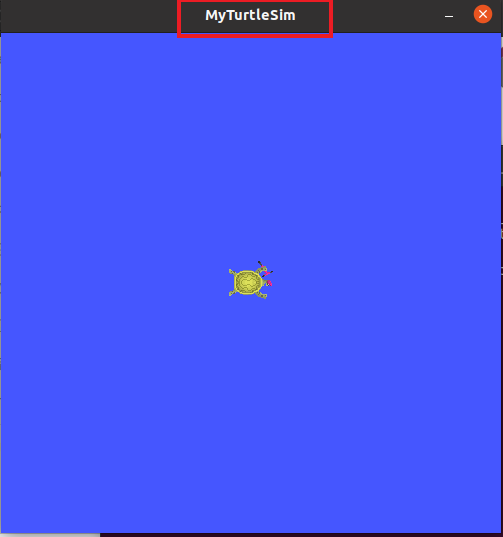
尽管ROS2安装环境在此终端已经source过了,但是dev_ws环境的overlay优先于underlay的内容。
要检查underlay是否仍然完整,打开一个全新的终端,并只source ROS2的安装环境。再次运行turtlesim:
ros2 run turtlesim turtlesim_node
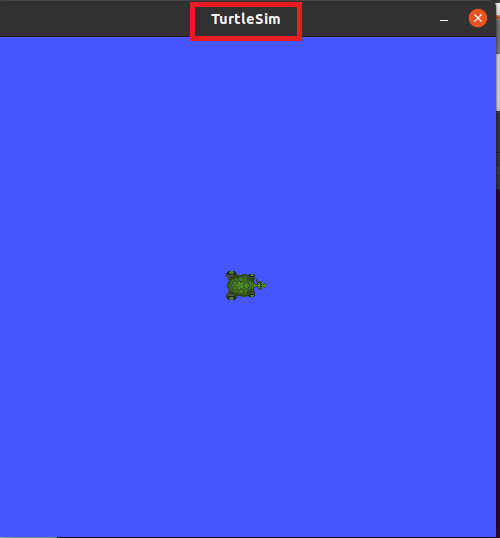
可以看到,对overlay的修改实际上并没有影响到underlay的任何东西。
8.总结
在本例中,将ROS2的安装环境作为underlay,并通过在新的工作空间中克隆和编译包来创建一个overlay,overlay优先于underlay。
对于处理少量的包,建议使用叠加,这样就不必将所有东西都放在同一个工作区中,并在每次迭代中重新编译一个巨大的工作区。
如果给您带来帮助,希望能给点个关注,以后还会陆续更新有关机器人的内容,点个关注不迷路~欢迎大家一起交流学习。
都看到这了,点个推荐再走吧~
未经允许,禁止转载。
ROS2学习之旅(12)——创建工作空间的更多相关文章
- ROS2学习之旅(4)——理解ROS2 Graph中的节点
ROS(2)图(ROS(2) graph)是一个同时处理数据的基于ROS2元素的网络,它包含了所有的可执行文件以及它们之间的连接.图中的基本元素包括:节点(nodes).话题(topics).服务(s ...
- ROS2学习之旅(13)——创建ROS2 功能包
一个功能包可以被认为是ROS2代码的容器.如果希望能够管理代码或与他人共享代码,那么需要将其组织在一个包中.通过包,可以发布ROS2工作,并允许其他人轻松地构建和使用它. 在ROS2中,创建功能包使用 ...
- ROS2学习之旅(20)——创建一个动作消息
本文用来自定义一个动作消息类型. 以下命令用来创建一个工作空间并建立一个功能包: mkdir -p action_ws/src cd action_ws/src ros2 pkg create act ...
- ROS2学习之旅(21)——创建一个动作服务和客户节点(C++)
动作是ROS中的一种异步通信形式,动作客户端向动作服务器发送目标请求,目标服务器向操作客户端发送目标反馈和结果.本文基于前一篇自定义动作博文. 1.创建一个action_turtorials_cpp包 ...
- ROS2学习之旅(14)——编写简单的发布者和订阅者(C++)
节点是通过ROS Graph进行通信的可执行进程.在本文中,节点将通过话题以字符串消息的形式相互传递信息.这里使用的例子是一个简单的"talker"和"listener& ...
- ROS2学习之旅(2)——配置ROS2环境
目录 1.source一下setup文件 2.自动source 3.自动进入工作区(不常用) 4.检查环境变量是否设置成功 5.总结 ROS2依赖于使用shell(终端)环境组合工作空间的概念.工作空 ...
- ROS2学习之旅(15)——编写简单的服务和客户节点(C++)
当节点使用服务进行通信时,发送数据请求的节点称为客户节点,响应请求的节点称为服务节点.请求和响应的结构由.srv文件决定. 本文的例子是一个简单的整数加法系统:一个节点请求两个整数的和,另一个节点响应 ...
- python学习之旅1-2(基础知识)
三,python基础初识. 1.运行python代码. 在d盘下创建一个t1.py文件内容是: print('hello world') 打开windows命令行输入cmd,确定后 写入代码pytho ...
- ROS2学习之旅(1)——初识ROS2
本系列用来记录ROS2的学习过程,有错误或者不合理的地方请大家指正.由于博主具有ROS1的学习经历,会添加一些与ROS1的一些对比,当然这对于ROS2本身的学习内容没有丝毫影响,欢迎大家积极与我在评论 ...
随机推荐
- sklearn中,数据集划分函数 StratifiedShuffleSplit.split() 使用踩坑
在SKLearn中,StratifiedShuffleSplit 类实现了对数据集进行洗牌.分割的功能.但在今晚的实际使用中,发现该类及其方法split()仅能够对二分类样本有效. 一个简单的例子如下 ...
- java 计算下面级数之和 1/3+3/5+5/7+...+97/99
代码实例图:package judgment;/** * 计算下面级数之和 * 1/3+3/5+5/7+...+97/99; */public class Judgment { public stat ...
- WebConfig配置,添加静态资源,外部可以直接访问地址
此配置是处理springboot拦截静态文件的 代码如下: @Configuration public class WebMvcConfig implements WebMvcConfigurer { ...
- [论文阅读笔记] Adversarial Learning on Heterogeneous Information Networks
[论文阅读笔记] Adversarial Learning on Heterogeneous Information Networks 本文结构 解决问题 主要贡献 算法原理 参考文献 (1) 解决问 ...
- The Superego 实验四 团队作业1:软件研发团队组建
项目 内容 课程班级博客链接 班级博客链接 这个作业要求链接 作业要求链接 团队名称 The Superego 团队的课程学习目标 (1)组建团队,建设团队文化,申请开通团队博客 (2)团队之间相互协 ...
- TVM性能评估分析(五)
TVM性能评估分析(五) Figure 3. A futher speed up with operator fusion Table 1. Performance issue of cuBLAS ...
- 蓝牙mesh网络技术的亮点
蓝牙mesh网络技术的亮点 The highlights of Bluetooth mesh networking technology 导言 蓝牙是当今最主要的低功耗无线技术之一,对无线设备用户和开 ...
- python+selenium基础篇,By定位元素
1.By定位和find_element_by_XXXXXX是一样的,如下图所示,定位元素的方法都是一样的 2.使用By定位代码如下所示 from selenium import webdriver f ...
- Netty 框架学习 —— ByteBuf
概述 网络数据的基本单位总是字节,Java NIO 提供了 ByteBuffer 作为它的字节容器,但这个类的使用过于复杂.Netty 的 ByteBuf 具有卓越的功能性和灵活性,可以作为 Byte ...
- 内核、dns、网卡配置
升级内核(安装新版软件包) rpm -ivh kernel-3.10.0-123.1.2.el7.x86_64.rpm 二.配置永久IP地址,子网掩码,网关地址 /etc/sysconfig/ne ...