OMPL RRTConnet 生成路径和可视化
默认规划路径算法和RRTConnet路径规划算法生成路径
1. 源代码
#include <ompl/base/SpaceInformation.h>
#include <ompl/base/spaces/SE3StateSpace.h>
#include <ompl/geometric/planners/rrt/RRTConnect.h>
#include <ompl/geometric/SimpleSetup.h>
#include <ompl/config.h>
#include <iostream>
#include <fstream>
#include <ostream>
namespace ob = ompl::base;
namespace og = ompl::geometric;
bool isStateValid(const ob::State *state)
{
// cast the abstract state type to the type we expect
const auto *se3state = state->as<ob::SE3StateSpace::StateType>();
// extract the first component of the state and cast it to what we expect
const auto *pos = se3state->as<ob::RealVectorStateSpace::StateType>(0);
// extract the second component of the state and cast it to what we expect
const auto *rot = se3state->as<ob::SO3StateSpace::StateType>(1);
// check validity of state defined by pos & rot
// return a value that is always true but uses the two variables we define, so we avoid compiler warnings
return (const void*)rot != (const void*)pos;
}
void planWithSimpleSetup()
{
// construct the state space we are planning in
auto space(std::make_shared<ob::SE3StateSpace>());
// set the bounds for the R^3 part of SE(3)
ob::RealVectorBounds bounds(3);
bounds.setLow(-1);
bounds.setHigh(1);
space->setBounds(bounds);
// define a simple setup class
og::SimpleSetup ss(space);
// set state validity checking for this space
ss.setStateValidityChecker([](const ob::State *state) { return isStateValid(state); });
// create a random start state
ob::ScopedState<> start(space);
start.random();
// create a random goal state
ob::ScopedState<> goal(space);
goal.random();
// set the start and goal states
ss.setStartAndGoalStates(start, goal);
// this call is optional, but we put it in to get more output information
ss.setup();
ss.print();
// set planner
ob::PlannerPtr planner(new og::RRTConnect(ss.getSpaceInformation()));
ss.setPlanner(planner);
// attempt to solve the problem within one second of planning time
ob::PlannerStatus solved = ss.solve(1.0);
if (solved)
{
std::cout << "Found solution:" << std::endl;
std::ofstream ofs0("../plot/path0.dat");
ss.getSolutionPath().printAsMatrix(ofs0);
// print the path to screen
ss.simplifySolution();
ss.getSolutionPath().print(std::cout);
std::ofstream ofs("../plot/path.dat");
ss.getSolutionPath().printAsMatrix(ofs);
}
else
std::cout << "No solution found" << std::endl;
}
int main(int /*argc*/, char ** /*argv*/)
{
std::cout << "OMPL version: " << OMPL_VERSION << std::endl;
planWithSimpleSetup();
return 0;
}
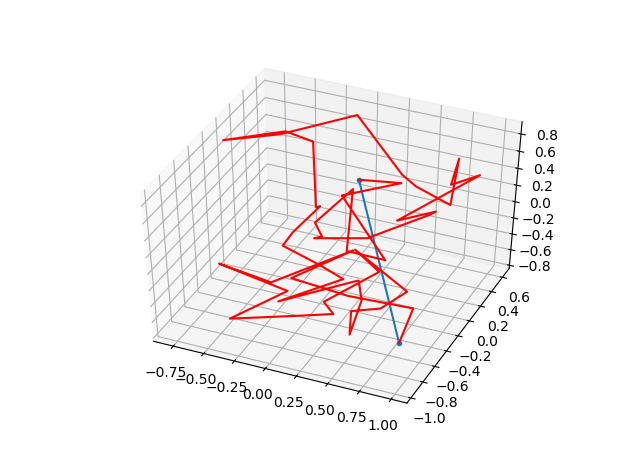
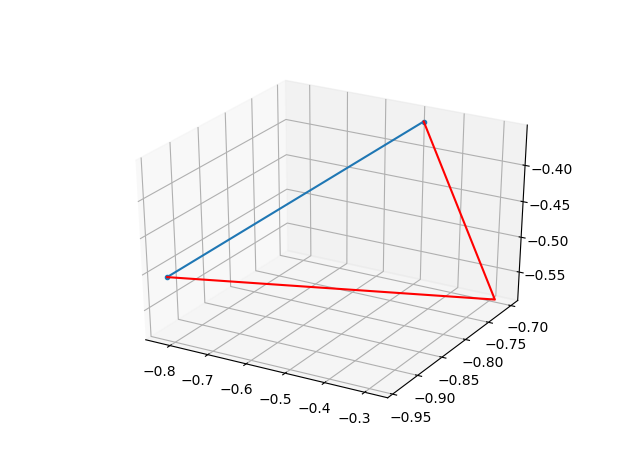
2. Python可视化生成的原始路径和简化路径
from mpl_toolkits.mplot3d import Axes3D
import numpy
import matplotlib.pyplot as plt
data = numpy.loadtxt('path.dat')
data1 = numpy.loadtxt('path0.dat')
fig = plt.figure()
ax = fig.gca(projection='3d')
ax.plot(data[:,0],data[:,1],data[:,2],'.-')
plt.hold('on')
plt.grid('on')
ax.plot(data1[:,0],data1[:,1],data1[:,2],'r-')
plt.show()
路径可视化方法可以参考官网 http://ompl.kavrakilab.org/pathVisualization.html
OMPL 参考列表
1. http://ompl.kavrakilab.org/group__demos.html
2. http://ompl.kavrakilab.org/tutorials.html
3. http://ompl.kavrakilab.org/gui.html#gui_paths
OMPL RRTConnet 生成路径和可视化的更多相关文章
- (转载)phpcms v9两步实现专题栏目生成路径去掉html和special
相信很多人都知道,phpcms v9专题是不支持自定义URL的,生成的专题路径是以/HTML/special/开头的.那么如何实现专题栏目生成路径去掉html和special呢?通过修改程序的PHP源 ...
- Xcode如何找到默认的生成路径?
我最近刚刚入门ObjectiveC,在研习<Objective C程序设计(第6版)>一书. 今天看到有关文件和归档的章节,但是我对XCode的生成文件路径并不了解,然后,在调试代码的时候 ...
- npm run build生成路径问题
vue项目中可以使用npm run build 命令生成静态文件夹dist,开发者可以直接点击dist文件夹下面的index.html问价来访问自己的项目,但是用vue-cli生成的项目,当运行npm ...
- mac自动生成路径问题
使用myBatis的逆向工程,一直无法生成.最后找同事帮忙,最终发现是 :路径前面少加一个反斜杠... 也就是 mac的绝对路径 前面需要加上 反斜杠.
- Linux下设置Core文件生成路径及文件名
修改core dump文件路径: 方法1:临时修改: 修改/proc/sys/kernel/core_pattern文件/proc目录本身动态加载每次系统重启都会重新加载因此种方法只能作临时修改/p ...
- Cadence Allegro小技巧之指定Gerber生成路径
Allegro生成Gerber数据时,默认会保存在与pcb文件相同目录路径下,Gerber数据本身就会生成好几个文件,然后与pcb文件,log文件,临时文件等混杂在一起,不易整理打包Gerber数据, ...
- 修改maven的war包生成路径
因为要配合jenkins,所以控制了war包的生成目录: <plugins> <!--打war包到指定的目录下 --> <plugin> <groupId&g ...
- symfony中模板生成路径两种方式
1. 使用url('route_a_b_c') 这种方式会是全路径 : http://www.test.com/a/b/c 2. 使用path('route_a_b_c') 这种方式只是路径: /a ...
- .NetCore利用Swagger生成 XML文档需要注意生成路径的地址
发布的时候如果用 release dotnet publish --configuration release dotnet publish 默认都是debug 会出现 XML丢失问题,其实可以看下工 ...
随机推荐
- 安装k8s,使用root帐号的初始化脚本
现在稳定性差不多了.可以总结一下了. 真正使用时,有几个地方,还是确认一下,再正式运行吧. #!/bin/bash # Version V0. ---: ;fi K8S_VERSION="1 ...
- P1169 [ZJOI2007]棋盘制作[悬线法/二维dp]
题目描述 国际象棋是世界上最古老的博弈游戏之一,和中国的围棋.象棋以及日本的将棋同享盛名.据说国际象棋起源于易经的思想,棋盘是一个8 \times 88×8大小的黑白相间的方阵,对应八八六十四卦,黑白 ...
- Caused by: java.nio.charset.MalformedInputException: Input length = 1
java.lang.IllegalStateException: Failed to load property source from location 'classpath:/applicatio ...
- 安装 uwsgi报错解决
背景: 安装 uwsgi时报错如下,查阅相关资料说是 python-devel的问题,于是安装之后python-devel后问题解决 报错如下: (venv) [xxxxxxx]# pip insta ...
- C# 6.0 中的新增功能(.NET Framework 4.6 与 Visual Studio 2015 )
C#6.0 在 2015 年7月随着.NET Framework 4.6 一同发布,后期发布了.NET Framework 4.6.1,4.6.2. 一.自动属性初始化(Auto-property i ...
- 结构型模式(五) 外观模式(Facade)
一.动机(Motivate) 在软件系统开发的过程中,当组件的客户(即外部接口,或客户程序)和组件中各种复杂的子系统有了过多的耦合,随着外部客户程序和各子系统的演化,这种过多的耦合面临很多变化的挑战. ...
- 【JS】基础知识
引言 在互联网的演化过程中,网页制作是Web1.0时代的产物,那时网站的主要内容都是静态的,用户使用网站的行为也以浏览为主. 2005年以后,互联网进入了Web2.0时代,各类似桌面软件的Web应用大 ...
- Bzoj 2818: Gcd(莫比乌斯反演)
2818: Gcd Time Limit: 10 Sec Memory Limit: 256 MB Description 给定整数N,求1<=x,y<=N且Gcd(x,y)为素数的 数对 ...
- (2)React的开发
实例: import React from 'react'; class TodoList extends React.Component { constructor(props){ super(pr ...
- WAMP本地环境升级php版本操作步骤(详细)
php版本下载地址:http://windows.php.net/download/ 步骤:下载php版本-解压文件-放到bin/php目录下-更改文件 图片教程: 更改文件内容: 1.从已存在的ph ...