TRIO-basic指令--CAM
大家好,今天更新TRIO的运动指令CAM(也就是CAM函数),CAM指令是控制器直接发送编码器脉冲形成的运动曲线,比如:正弦,余弦曲线,根据自己的精度需求进行描点,但并不一定点数越多精度就越高,以实际为准。
下面是指令及简单的小例子:
CAM
Type:
Axis Command
Syntax:
CAM(start point, end point, table multiplier, distance) CAM(开始点,结束点,table(table是临时寄存器) 倍率,距离)
Description:
The CAM command is used to generate movement of an axis according to a table of positions which define a movement profile. The table of values is specified with the TABLE command. The movement may be defined with any number of points from 3 up to the maximum table size available. The controller performs linier interpolation between the values in the table to allow small numbers of points to define a smooth profile.
CAM命令用于根据定义运动轮廓的位置表生成轴的运动。使用TABLE命令指定值表。可以使用从3到最大可用表大小的任意数量的点来定义移动。控制器在表格中的值之间执行线性插值,以允许少量点定义平滑轮廓。
The TABLE values are translated into positions by offsetting them by the first value and then multiplying them by the multiplier parameter. This means that a non-zero starting profile will be offset so that the first point is zero and then all values are scaled with the multiplier. These are then used as absolute positions from the start position.
通过将它们偏移第一个值然后将它们乘以乘数参数,将TABLE值转换为位置。这意味着非零起始轮廓将被偏移,以便第一个点为零,然后使用乘数缩放所有值。然后将它们用作起始位置的绝对位置。
Two or more CAM commands executing simultaneously can use the same values in the table.
同时执行的两个或多个CAM命令可以使用表中的相同值。
The speed of the CAM profile is defined through the SPEED of the BASE axis and the distance parameter. You can use these two values to determine the time taken to execute the CAM profile.
CAM轮廓的速度通过BASE轴的SPEED和距离参数定义。您可以使用这两个值来确定执行CAM配置文件所需的时间。
As with any motion command the SPEED may be changed at any time to any positive value. The SPEED is ramped up to using the current ACCEL value.
与任何运动命令一样,SPEED可以随时更改为任何正值。 SPEED逐渐增加到使用当前ACCEL值。
To obtain a CAM shape where ACCEL has no effect the value should be set to at least 1000 times the SPEED value (assuming the default SERVO_PERIOD of 1ms).
要获得ACCEL无效的CAM形状,应将该值设置为SPEED值的至少1000倍(假设默认SERVO_PERIOD为1ms)。
When the CAM command is executing, the ENDMOVE parameter is set to the end of the PREVIOUS move
执行CAM命令时,ENDMOVE参数设置为PREVIOUS移动的结束
Parameters:
|
start point: |
The start position of the cam profile in the TABLE |
|
end point: |
The end position of the cam profile in the TABLE |
|
multiplier: |
The table values are multiplied by this value to generate the positions. |
|
distance: |
The distance parameter relates the speed of the axis to the time taken to complete the cam profile. The time taken can be calculated using the current axis speed and this distance parameter (which are in user units). |
|
起始点: |
表中凸轮轮廓的起始位置 |
|
结束点: |
表格中凸轮轮廓的终点位置 |
|
乘值: |
表值乘以该值以生成位置。 |
|
距离: |
距离参数将轴的速度与完成凸轮轮廓所花费的时间相关联。可以使用当前轴速度和该距离参数(以用户单位)计算所花费的时间。 |
Examples:
1、需求:用CAM做一个位置弧形的曲线。 网上找的图片 ^_^
position:

CAM没有跟随轴的概念,所以我们可以直接运行一个虚轴或者实际的轴直接生成你要的位置曲线图。
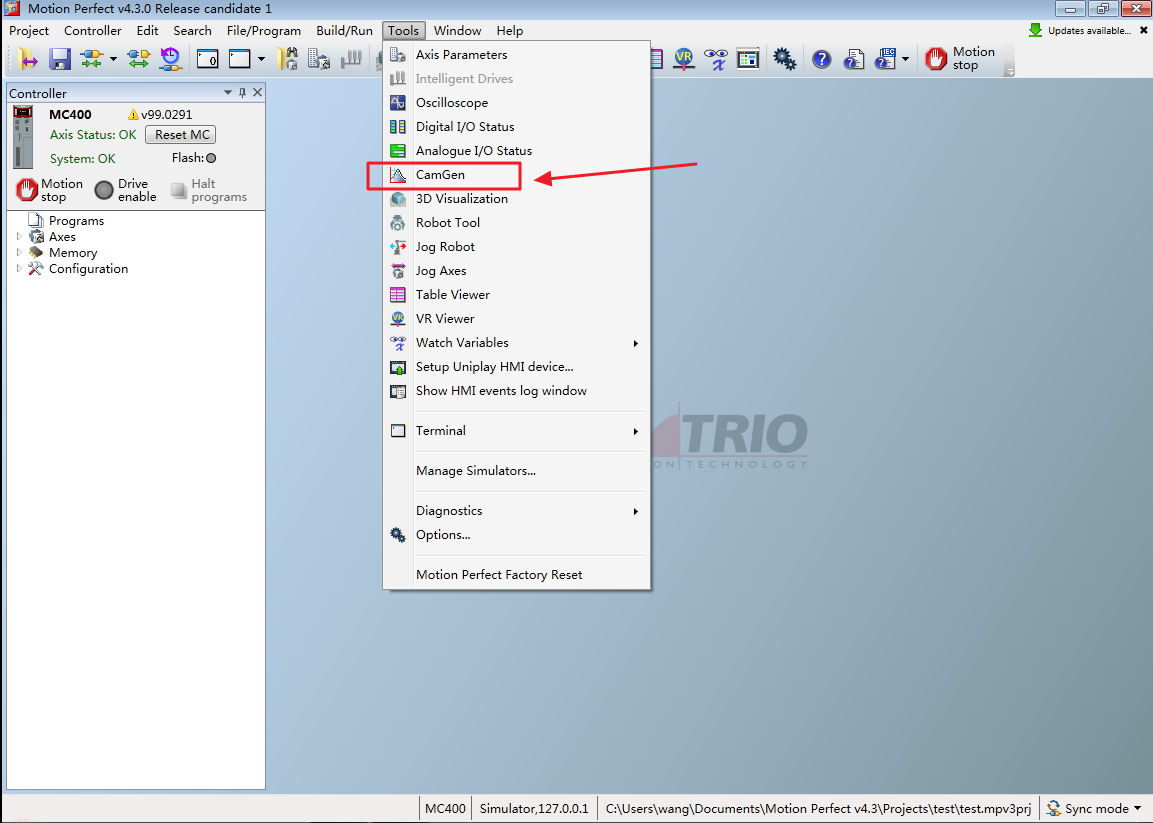
打开TRIO编程界面,然后在工具栏 => CamGen => 然后创建一个名称,如下图:

或者:
下一步:

点击OK进入的界面:
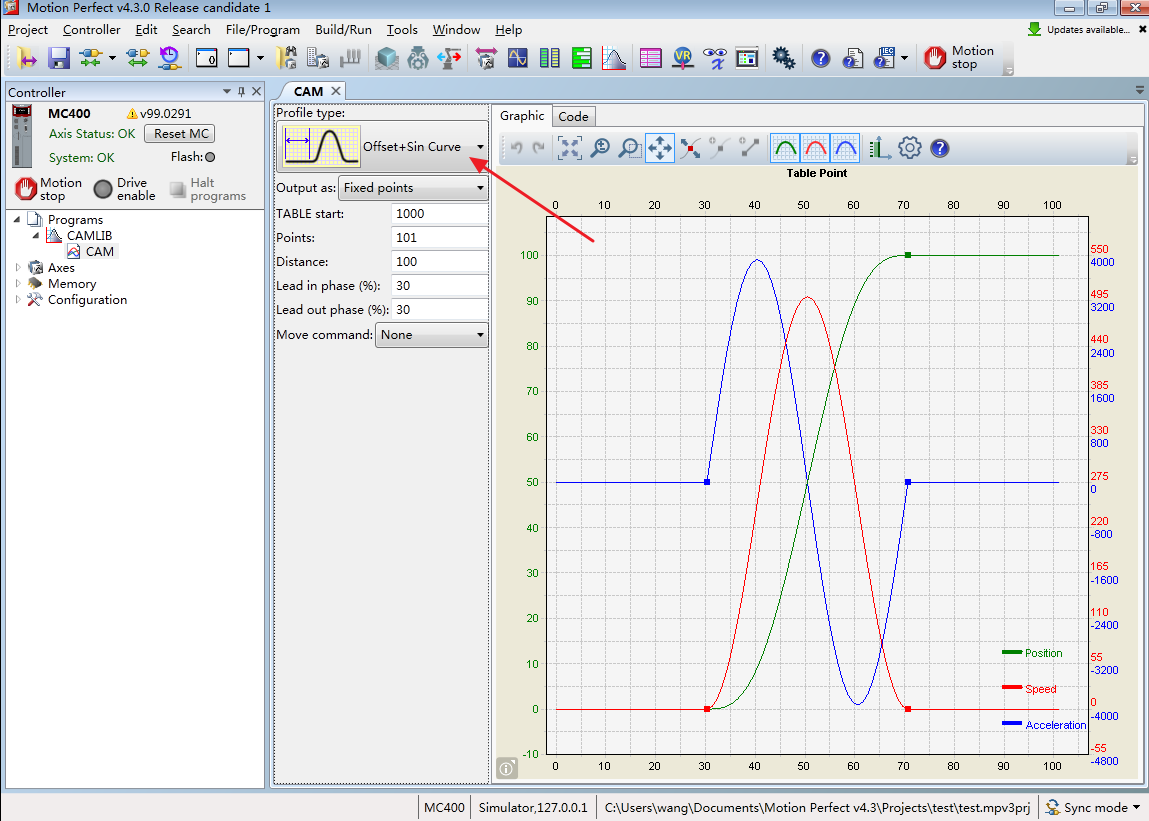
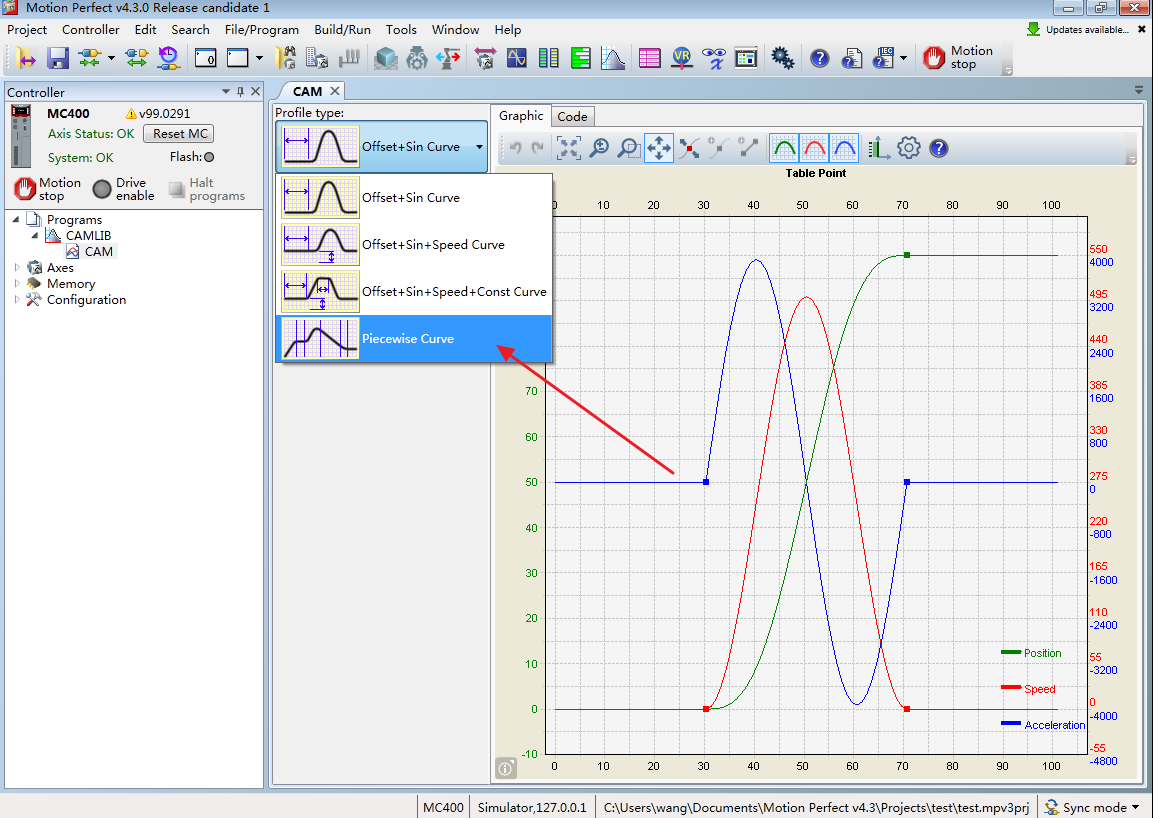
点击:选择
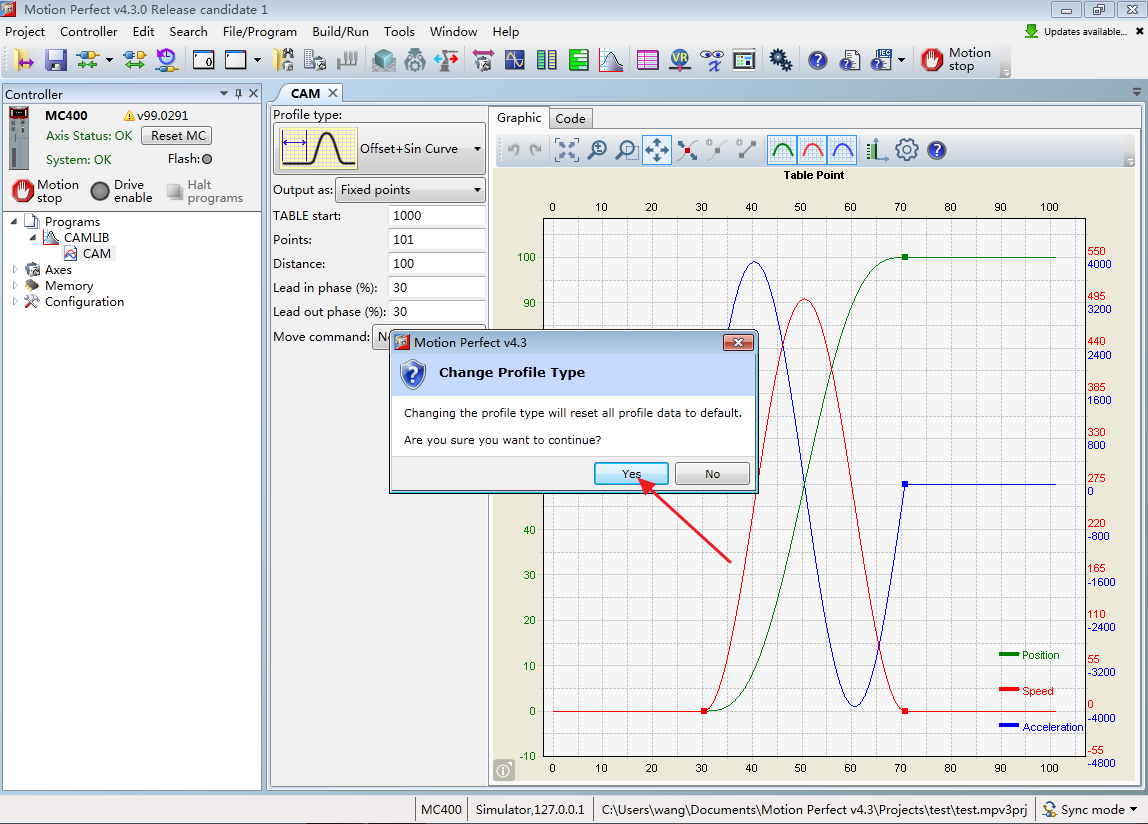
选择:yes
注意看下图标注的位置:
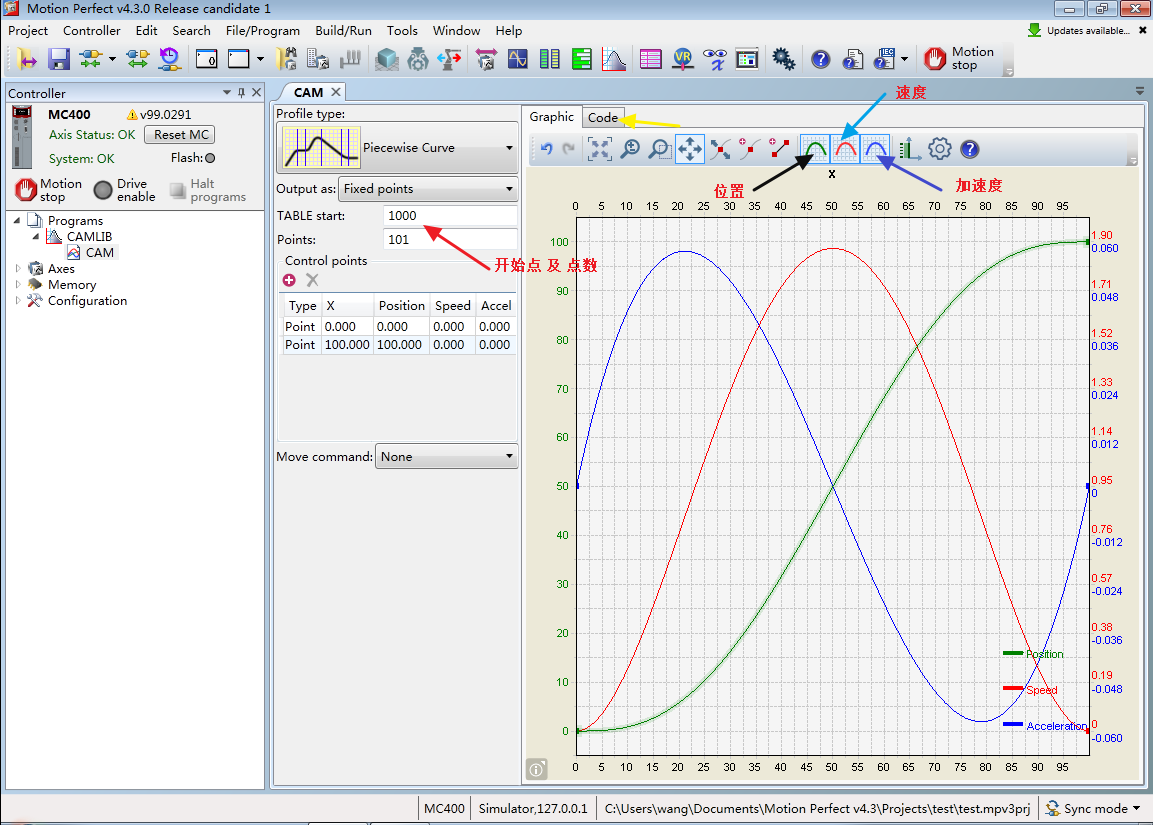
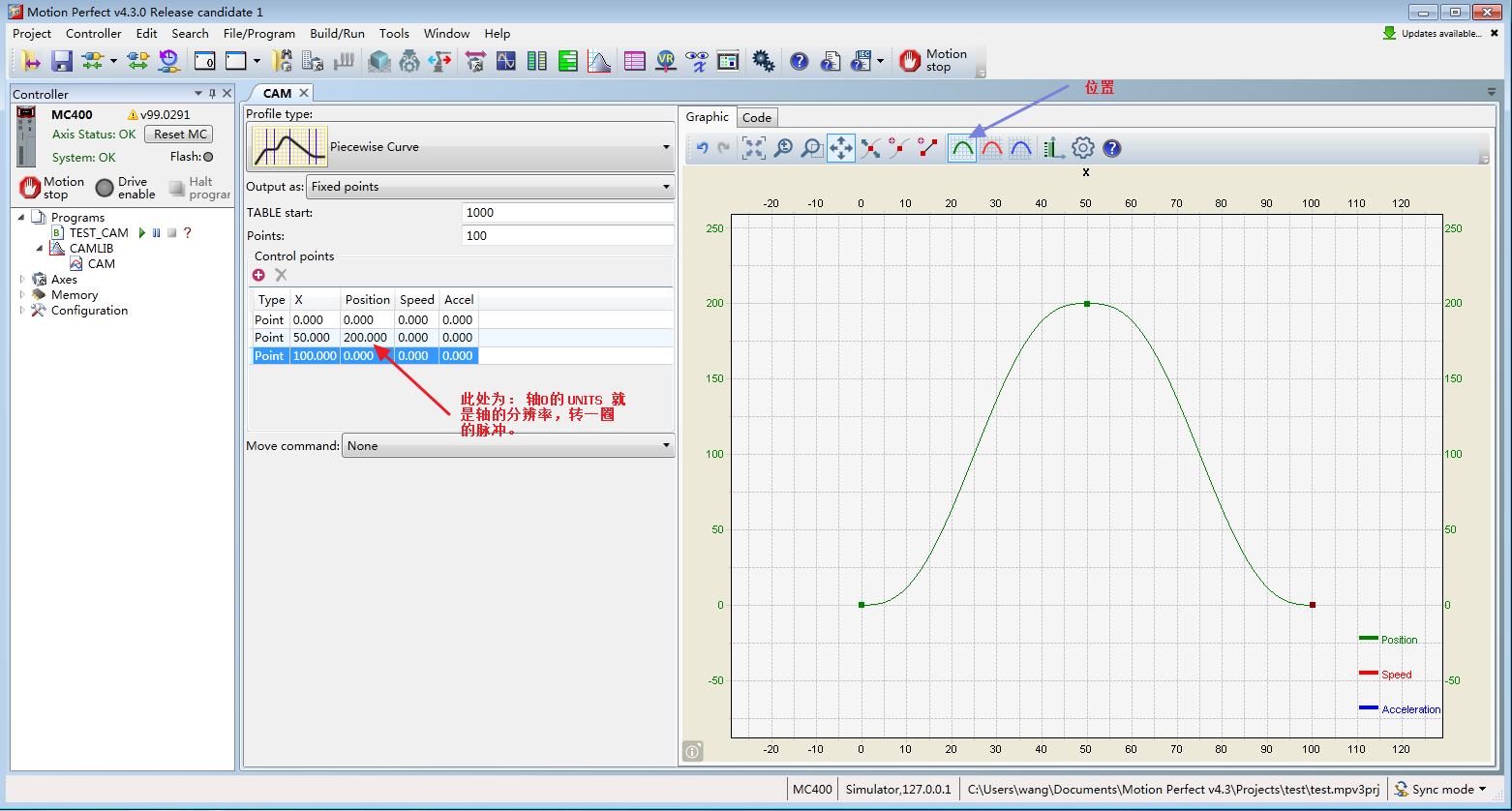
上面是简单的介绍,下面我们先规划一条抛物线的位置曲线。
下面即可直接复制生成的代码,直接运动。

把上面复制的代码放在运行的程序中,运行即可。
DIM tablestart, points AS INTEGER
'Start CamGen Sector1
'->ProfileClass=PiecewiseCurve
'->ProfileName=CAM
'->OutputType=Points
'->MinLogicalX=0
'->MaxLogicalX=100
'->CamLinkInput=500
'->Segment=0;0;0.0000;0.0000;0.0000;Point
'->Segment=1;0.5;200.0000;0.0000;0.0000;Point
'->Segment=2;1;0.0000;0.0000;0.0000;Point
'->TableStart=1000
'->TableLength=100
' set the variables
tablestart =
points =
' store the table points
TABLE(tablestart,0.0000,0.0160,0.1241,0.4057,0.9316,1.7615,2.9456,4.5241)
TABLE(tablestart + ,6.5283,8.9810,11.8967,15.2822,19.1375,23.4556,28.2235)
TABLE(tablestart + ,33.4224,39.0284,45.0129,51.3427,57.9814,64.8890,72.0227)
TABLE(tablestart + ,79.3375,86.7865,94.3217,101.8938,109.4536,116.9518)
TABLE(tablestart + ,124.3396,131.5696,138.5958,145.3741,151.8632,158.0247)
TABLE(tablestart + ,163.8238,169.2295,174.2156,178.7606,182.8486,186.4694)
TABLE(tablestart + ,189.6196,192.3025,194.5286,196.3166,197.6934,198.6948)
TABLE(tablestart + ,199.3659,199.7615,199.9468,199.9980,199.9980,199.9468)
TABLE(tablestart + ,199.7615,199.3659,198.6948,197.6934,196.3166,194.5286)
TABLE(tablestart + ,192.3025,189.6196,186.4694,182.8486,178.7606,174.2156)
TABLE(tablestart + ,169.2295,163.8238,158.0247,151.8632,145.3741,138.5958)
TABLE(tablestart + ,131.5696,124.3396,116.9518,109.4536,101.8938,94.3217)
TABLE(tablestart + ,86.7865,79.3375,72.0227,64.8890,57.9814,51.3427,45.0129)
TABLE(tablestart + ,39.0284,33.4224,28.2235,23.4556,19.1375,15.2822,11.8967)
TABLE(tablestart + ,8.9810,6.5283,4.5241,2.9456,1.7615,0.9316,0.4057,0.1241)
TABLE(tablestart + ,0.0160,0.0000)
'Stop CamGen Sector1 'test_cam position
BASE()
ATYPE =
UNITS =
SPEED =
ACCEL =
DECEL =
FE_LIMIT =
FE_RANGE =
DEFPOS()
SERVO = WHILE TRUE
WA() 'yan shi 1s
TRIGGER 'catch curve
CAM(,,,)AXIS()
WA() 'yan shi 1s
WEND
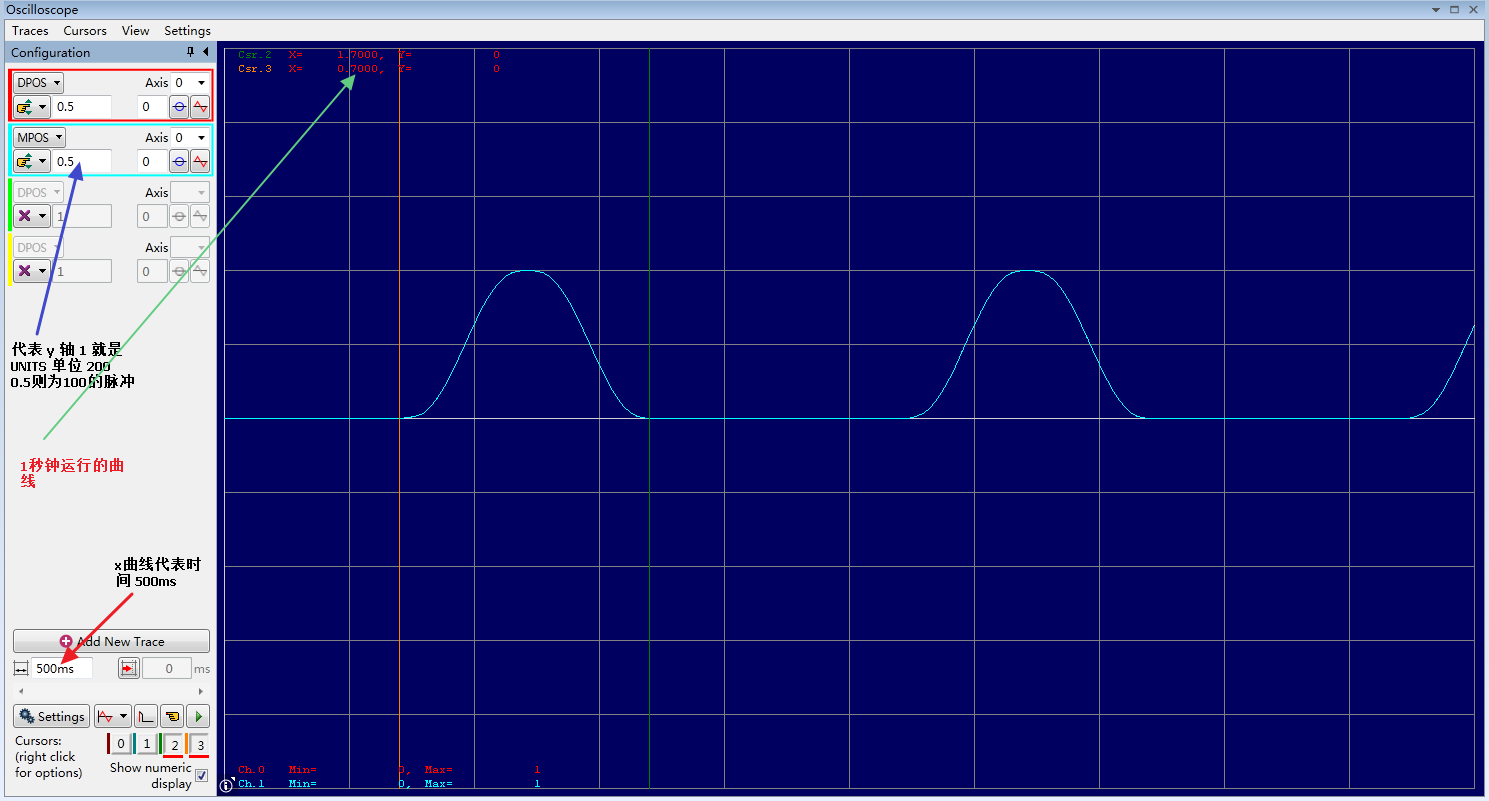
运行的曲线结果:
下面是详细介绍 CAM 参数值
CAM(,,,)AXIS(0)
CAM(“规划曲线的时候,我们填的 TABLE start的值”,
“Points 里面的值,相当于 从 1000开始 100个TABLE表 1000~1099”,
“倍率:相当于轴的脉冲数 * 当前的值。上面我们测试的脉冲是 200 * 1 实际电机走的位置为200 ,如果填 2 就相当于 200 * 2 实际电机走的位置就是 400 ”,
“此值就是:时间 * 当前的速度值,更据测试解释 我希望 1s完成 200的速度,1*200 = 200. 如果我希望0.5s完成200的速度,就是 0.5 * 200 = 100,上面的值就可以填写100,更据实际情况而定”
) 运动的轴号 上面是一个简单的应用,如果大家用项目用到,可以当做一个简单的参考,大神请路过。上面有表述有问题的地方,可在评论区留言,本人会更据实际情况进行修改。后期会介绍一些项目中其他的指令,如:MOVELINK , REGIST等指令。
TRIO-basic指令--CAM的更多相关文章
- 杂项-软件: VBA(Visual Basic for Applications)
ylbtech-杂项-软件: VBA(Visual Basic for Applications) VBA (Visual Basic宏语言) Visual Basic for Application ...
- Nginx模块参考手册:HTTP核心模块
FROM: http://blog.chinaunix.net/xmlrpc.php?r=blog/article&uid=17238776&id=2982697 这些模块默认会全部编 ...
- nginx 参数详解
nginx的http web功能 必须使用虚拟机来配置站点:每个虚拟主机使用一个server{}段来配置 非虚拟主机的配置.公共选项,需要定义在server之外,http之内 ...
- 我在知乎上关于Laser200/310电脑的文章。
我是30年前从Laser-310起步的,我来回答这个问题. 主要硬件规格: CPU:Z-80A/4.7MHz主频 16K RAM + 2K Video RAM 16K ROM 磁带输出:波特率300 ...
- Nginx HTTP 核心模块
原文链接:http://blog.chinaunix.net/xmlrpc.php?r=blog/article&uid=17238776&id=2982697aio 语法:aio [ ...
- TRIO-basic指令--函数FUNCTION
TRIO-basic支持函数(强类型)编程,与PLC来相比较的话类似于定义的功能块可以重复调用,和C,C#......等一些高级的编程语言的函数类似.上一次的demo中决定尝试TRIO的函数来做一些例 ...
- IL指令详细表
名称 说明 Add 将两个值相加并将结果推送到计算堆栈上. Add.Ovf 将两个整数相加,执行溢出检查,并且将结果推送到计算堆栈上. Add.Ovf.Un 将两个无符号整数值相加,执行溢出检查,并且 ...
- IL指令汇总
名称 说明 名称 说明 Add 将两个值相加并将结果推送到计算堆栈上. Ldelem.I1 将位于指定数组索引处的 int8 类型的元素作为 int32 加载到计算堆栈的顶部. Add.Ovf ...
- [.NET逆向] .net IL 指令速查(net破解必备)
.net的破解比较特殊,很多人看见IL就头疼,最近在研究的时候发现了这个东东 相信对广大学习net破解的人一定有帮助 .对上指令表一查,跟读原代码没什么区别了, 名称 说明 Add 将两个值相加并将结 ...
随机推荐
- javascript之DOM(一节点类型Node)
DOM(Document Object Model)是针对HTML和XML文档的一个API.DOM描述的是一个层次化的节点树,允许开发人员添加.移除和修改页面的某一部分.起源于DHML,现为W3C的推 ...
- Java期末复习——主观题
JDK 和 JRE 有什么区别? JDK:Java Development Kit 的简称,java 开发工具包,提供了 java 的开发环境和运行环境. JRE:Java Runtime Envir ...
- Comet OJ - Contest #10 C.鱼跃龙门
传送门 题意: 求最小的\(x\),满足\(\frac{x(x+1)}{2}\% n=0,n\leq 10^{12}\). 多组数据,\(T\leq 100\). 思路: 直接考虑模运算似乎涉及到二次 ...
- for each 语句
for each 语句是java5新增,在遍历数组.集合的时候,for each拥有不错的性能. for each 虽然能遍历数组或者集合,但是只能用来遍历,无法在遍历的过程中对数组或者集合进行修改. ...
- linux防止恶意采集攻防战
这两天ytkah开发的一个中大型项目被人盯上了,网站打开非常慢,查看了一下cpu.内存使用情况,30%左右占用不高,网络上下行就比较大了,IO实时流量达到40MB,IO总流量更是7TB,非常大的数据量 ...
- 04-cmake语法-STREQUAL
STREQUAL 用于比较字符串,相同返回 true .
- Python GIL、CPU密集型、IO密集型
Python GIL(Global Interpreter Lock(全局解释器锁)) 1:进程里面多个线程,线程 共享A=10 2:Python解释器,A改完值之后会传回进程容器,为了防止A和B同时 ...
- RHCE试题解析
环境准备 yum-config-manager --add-repo=ADDREPO vim /etc/yum.conf gpgcheck=0(1=on,0=off) 增加指定repo源,关闭签名 ...
- [RN] React Native 实现 多选标签
React Native 实现 多选标签 效果如下: 实现代码: import React, {Component} from 'react'; import {Button, StyleSheet, ...
- 图的遍历 | 1034 map处理输入数据,连通块判断
这题写得比较痛苦.首先有点不在状态,其次题目比较难读懂. “Gang”成立的两个条件:①成员数大于两个 ②边权总和大于阈值K 首先,在录数据的时候通过map或者字符串哈希建立string到int的映 ...