Linux性能优化实战学习笔记:第三十讲
一、性能指标

二、文件系统I/O性能指标
1、存储空间的使用情况

文件系统向外展示的空间使用,而非磁盘空间的真是用量,因为文件系统的元数据也会占用磁盘空间
2、索引节点的使用情况
如果存储过多的小文件、就可能碰到索引节点容量已满的问题
3、缓存使用情况
如果存储过多的小文件、就可能碰到索引节点容量已满的问题,从而可以减少访问慢速磁盘的次数
4、文件IO
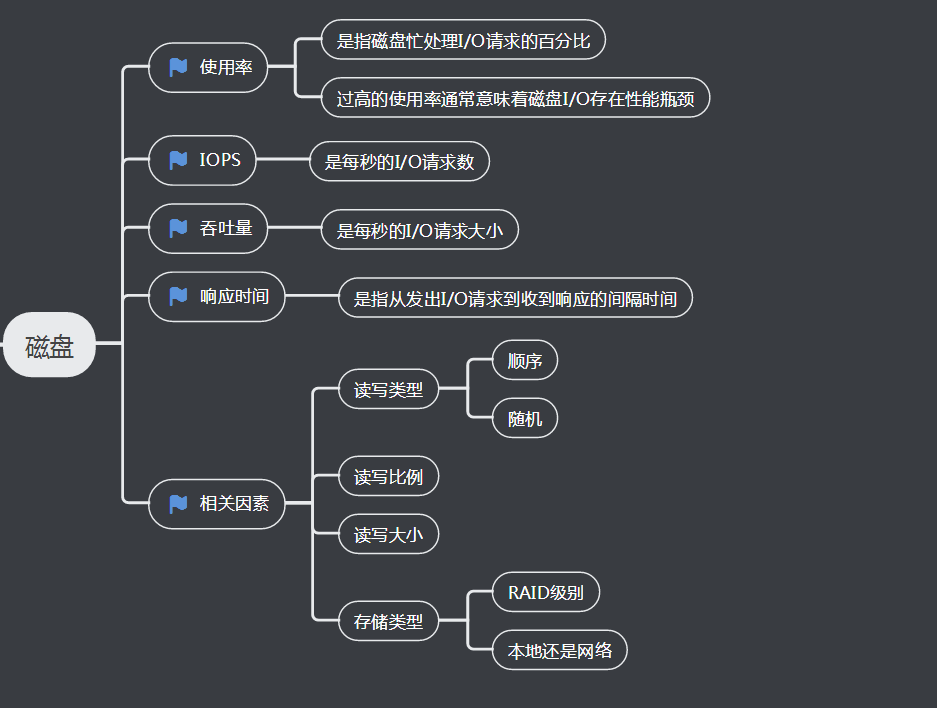
三、磁盘I/O性能指标
四、性能工具
1、文件系统原理

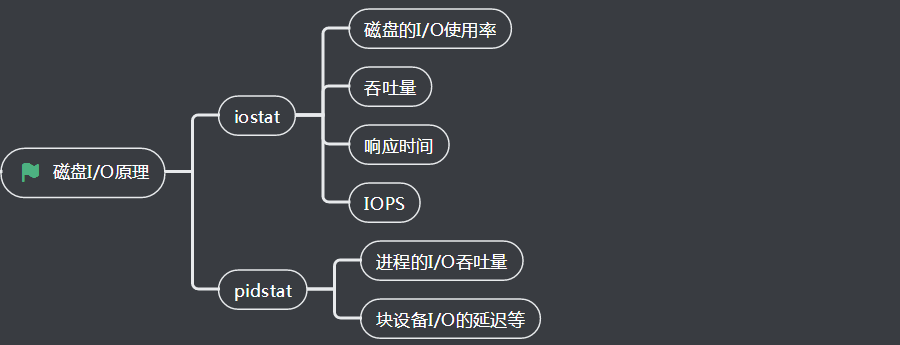
2、磁盘I/O原理
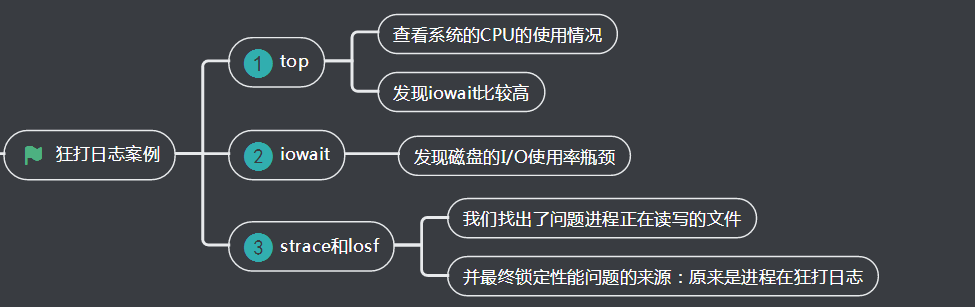
3、狂打日志案例
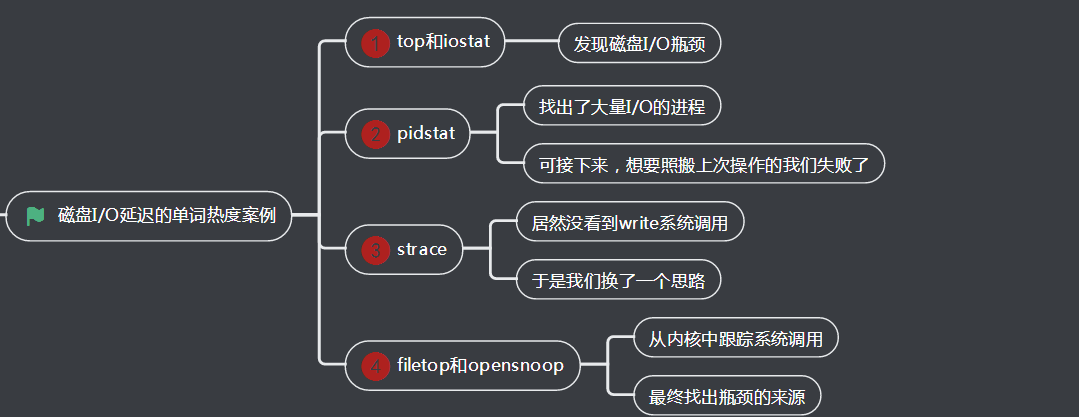
4、磁盘I/O延迟的单词热度案例
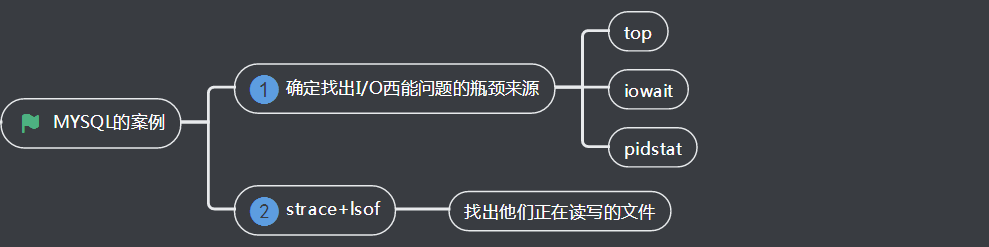
5、MYSQL的案例
6、redis的案例

五、性能指标和工具的联系
第一个维度、从文件系统和磁盘 I/O 的性能指标出发。换句话说,当你想查看某个性能指标时,要清楚知道,哪些工具可以做到
根据指标找工具

第二个维度,从工具出发。也就是当你已经安装了某个工具后,要知道这个工具能提供哪些指标
根据指标找工具

根据指标招工
六、如何迅速分析 I/O 的性能瓶颈
那有没有什么方法,可以又快又准地找出系统的 I/O 瓶颈呢?
还是那句话,找关联。多种性能指标间都有一定的关联性,不要完全孤立的看待他们。想弄清楚性能指标的关联性,
就要通晓每种性能指标的工作原理。这也是为什么我在介绍每个性能指标时,都要穿插讲解相关的系统原理,再次希望你能记住这一点。
1、先用 iostat 发现磁盘 I/O 性能瓶颈;
2、再借助 pidstat ,定位出导致瓶颈的进程;
3、随后分析进程的 I/O 行为;
4、最后,结合应用程序的原理,分析这些 I/O 的来源。
所以,为了缩小排查范围,我通常会先运行那几个支持指标较多的工具,如 iostat、vmstat、pidstat 等。然后再根据观察到的现象,结合系统和应用程序的原理,寻找下一
步的分析方向。我把这个过程画成了一张图,你可以保存下来参考使用。

图中列出了最常用的几个文件系统和磁盘 I/O 性能分析工具,以及相应的分析流程,箭头则表示分析方向。这其中,iostat、vmstat、pidstat 是最核心的几个性能工具,它们也提
供了最重要的 I/O 性能指标。举几个例子你可能更容易理解。
例如,在前面讲过的 MySQL 和 Redis 案例中,我们就是通过 iostat 确认磁盘出现 I/O性能瓶颈,然后用 pidstat 找出 I/O 最大的进程,接着借助 strace 找出该进程正在读写的
文件,最后结合应用程序的原理,找出大量 I/O 的原因。
再如,当你用 iostat 发现磁盘有 I/O 性能瓶颈后,再用 pidstat 和 vmstat 检查,可能会发现 I/O 来自内核线程,如 Swap 使用大量升高。这种情况下,你就得进行内存分析了,
先找出占用大量内存的进程,再设法减少内存的使用。
另外注意,我在这个图中只列出了最核心的几个性能工具,并没有列出前面表格中的所有工具。这么做,一方面是不想用大量的工具列表吓到你。在学习之初就接触所有核心或小
众的工具,不见得是好事。另一方面,也是希望你能先把重心放在核心工具上,毕竟熟练掌握它们,就可以解决大多数问题。
所以,你可以保存下这张图,作为文件系统和磁盘 I/O 性能分析的思路图谱。从最核心的这几个工具开始,通过我提供的那些案例,自己在真实环境里实践,拿下它们。
七、小结
今天,我们一起复习了常见的文件系统和磁盘 I/O 性能指标,梳理了常见的 I/O 性能观测工具,并建立了性能指标和工具的关联。最后,我们还总结了快速分析 I/O 性能问题的思路。
还是那句话,虽然 I/O 的性能指标很多,相应的性能分析工具也有不少,但熟悉了各指标含义后,你就会自然找到它们的关联。顺着这个思路往下走,掌握常用的分析套路也并不难。
Linux性能优化实战学习笔记:第三十讲的更多相关文章
- Linux性能优化实战学习笔记:第十讲
一.坏境准备 1.拓扑图 2.安装包 在第9节的基础上 在VM2上安装hping3依奈包 wget http://www.tcpdump.org/release/libpcap-1.9.0.tar.g ...
- Linux性能优化实战学习笔记:第十八讲
一.内存的分配和回收 1.管理内存的过程中,也很容易发生各种各样的“事故”, 对应用程序来说,动态内存的分配和回收,是既核心又复杂的一的一个逻辑功能模块.管理内存的过程中,也很容易发生各种各样的“事故 ...
- Linux性能优化实战学习笔记:第十二讲
一.性能优化方法论 不可中断进程案例 二.怎么评估性能优化的效果? 1.评估思路 2.几个为什么 1.为什么要选择不同维度的指标? 应用程序和系统资源是相辅相成的关系 2.性能优化的最终目的和结果? ...
- Linux性能优化实战学习笔记:第六讲
一.环境准备 1.安装软件包 终端1 机器配置:2 CPU,8GB 内存 预先安装 docker.sysstat.perf等工具 [root@luoahong ~]# docker -v Docker ...
- Linux性能优化实战学习笔记:第十六讲
一.free数据的来源 1.碰到看不明白的指标时该怎么办吗? 不懂就去查手册.用 man 命令查询 free 的文档.就可以找到对应指标的详细说明.比如,我们执行 man fre... 2.free数 ...
- Linux性能优化实战学习笔记:第十七讲
一.缓存命中率 1.引子 1.我们想利用缓存来提升程序的运行效率,应该怎么评估这个效果呢? 用衡量缓存好坏的指标 2.有没有哪个指标可以衡量缓存使用的好坏呢? 缓存命中率 3.什么是缓存命中率? 所谓 ...
- Linux性能优化实战学习笔记:第四讲
一.怎么查看系统上下文切换情况 通过前面学习我么你知道,过多的上下文切换,会把CPU时间消耗在寄存器.内核栈以及虚拟内存等数据的保存和回复上,缩短进程真正运行的时间,成了系统性能大幅下降的一个元凶 既 ...
- Linux性能优化实战学习笔记:第二十七讲
一.案例环境描述 1.环境准备 2CPU,4GB内存 预先安装docker sysstat工具 2.温馨提示 案例中 Python 应用的核心逻辑比较简单,你可能一眼就能看出问题,但实际生产环境中的源 ...
- Linux性能优化实战学习笔记:第六讲1
一.环境准备 1.安装软件包 终端1 机器配置:2 CPU,8GB 内存 预先安装 docker.sysstat.perf等工具 [root@luoahong ~]# docker -v Docker ...
- Linux性能优化实战学习笔记:第七讲
一.进程的状态 1.命令查看 top PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND 28961 root 20 0 43816 3148 ...
随机推荐
- Luogu P3577 [POI2014]TUR-Tourism
Luogu P3577 [POI2014]TUR-Tourism 题目链接 题目大意:给出一张\(n\)个点,\(m\)条边的无向图,保证任意两点之间没有点数超过\(10\)的简单路径.选择第\(i\ ...
- APP兼容性测试 (二) 最新 iPhone 机型分辨率总结
iPhone手机发布时间及iOS发布 iPhone是美国苹果公司研发的智能手机系列,搭载苹果公司研发的iOS操作系统. 第一代iPhone于2007年1月9日由苹果公司前首席执行官史蒂夫·乔布斯发布, ...
- Vue.js 源码分析(四) 基础篇 响应式原理 data属性
官网对data属性的介绍如下: 意思就是:data保存着Vue实例里用到的数据,Vue会修改data里的每个属性的访问控制器属性,当访问每个属性时会访问对应的get方法,修改属性时会执行对应的set方 ...
- thymeleaf入门
controller层添加实体 html <!DOCTYPE html> <html xmlns:th="http://www.thymeleaf.org"> ...
- jre、jdk、jvm之间的关系
很多Java的程序员在写了很多代码之后,你问他JRE和JDK是是什么关系,JVM又是什么东西,他是不知道的. JVM(Java Virtual Machine) Java 虚拟机.它只认识 xxx.c ...
- 云原生生态周报 Vol.9| K8s v1.15 版本发布
本周作者 | 衷源.心贵 业界要闻 1.Kubernetes Release v1.15 版本发布,新版本的两个主题是持续性改进和可扩展性.(https://github.com/kubernetes ...
- Jms规范学习
1.什么是消息中间件? 关注于数据的发送和接受,利用高效可靠的异步消息传递机制集成分布式系统. 2.什么是JMS? Java消息服务(java Message Service)即JMS,是一个java ...
- .net Dapper 学习系列(1) ---Dapper入门
目录 写在前面 为什么选择Dapper 在项目中安装Dapper 在项目中使用Dapper 在项目中使用Dapper 进行单表增删改数据操作 总结 写在前面 Dapper 是一款轻量级ORM架构.为解 ...
- 解决 Windows Server 2008 R2 上 Windows Update 无法失败,提示 8024402F
1.同步服务器时间 2.打开 services.msc,停止 Windows Update Service 3.手动下载 KB3138615 补丁:https://support.microsoft. ...
- C#中一行代码实现18位数字时间戳转换为DateTime
场景 存取的时间戳数据为: 636728674347302002 怎样将其转换为DateTime时间. 目前大多数的策略是,转换成string,然后 DateTime dateTimeStart = ...