0_Simple__simpleCubemapTexture
立方体纹理贴图
▶ 源代码。用纹理方法把元素按原顺序从 CUDA3D 数组中取出来,求个相反数放入全局内存,输出。
#include <stdio.h>
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <helper_functions.h>
#include <helper_cuda.h> #define MIN_EPSILON_ERROR 5e-3f texture<float, cudaTextureTypeCubemap> tex; __global__ void transformKernel(float *g_odata, int width)
{
unsigned int x = blockIdx.x*blockDim.x + threadIdx.x;
unsigned int y = blockIdx.y*blockDim.y + threadIdx.y; float u = ((x + 0.5f) / (float)width) * .f - .f;// [0, width-1] 间隔 1 的坐标变换为 [-1+1/width,1-1/width] 间隔 1/width 的坐标
float v = ((y + 0.5f) / (float)width) * .f - .f; float cx, cy, cz; for (unsigned int face = ; face < ; face++)
{
if (face == )// x 正层
{
cx = ;
cy = -v;
cz = -u;
}
else if (face == )// x 负层
{
cx = -;
cy = -v;
cz = u;
}
else if (face == )// y 正层
{
cx = u;
cy = ;
cz = v;
}
else if (face == )// y 负层
{
cx = u;
cy = -;
cz = -v;
}
else if (face == )// z 正层
{
cx = u;
cy = -v;
cz = ;
}
else if (face == )// z 负层
{
cx = -u;
cy = -v;
cz = -;
}
g_odata[face*width*width + y*width + x] = - texCubemap(tex, cx, cy, cz);// 纹理数据读取到全局内存中输出
}
} int main(int argc, char** argv)
{
unsigned int width = , num_faces = , num_layers = ;
unsigned int cubemap_size = width * width * num_faces;
unsigned int size = cubemap_size * num_layers * sizeof(float);
float *h_data = (float *)malloc(size);
float *h_data_ref = (float *)malloc(size); // 理论输出
float *d_data = NULL;
cudaMalloc((void **)&d_data, size); for (int i = ; i < (int)(cubemap_size * num_layers); i++)
h_data[i] = (float)i;
for (unsigned int layer = ; layer < num_layers; layer++)
{
for (int i = ; i < (int)(cubemap_size); i++)
h_data_ref[layer*cubemap_size + i] = -h_data[layer*cubemap_size + i] + layer;
} printf("\n\t\Input data.n\t");
for (int i = ; i < width * num_faces * num_layers; i++)
{
printf("%2.1f ", h_data[i]);
if ((i + ) % width == )
printf("\n\t");
if ((i + ) % (width *width) == )
printf("\n\t");
}
printf("\n\tIdeal output data\n\t");
for (int i = ; i < width * num_faces * num_layers; i++)
{
printf("%2.1f ", h_data_ref[i]);
if ((i + ) % width == )
printf("\n\t");
if ((i + ) % (width *width) == )
printf("\n\t");
} // 设置 CUDA 3D 数组参数和数据拷贝
cudaChannelFormatDesc channelDesc = cudaCreateChannelDesc(, , , , cudaChannelFormatKindFloat);
cudaArray *cu_3darray;
cudaMalloc3DArray(&cu_3darray, &channelDesc, make_cudaExtent(width, width, num_faces), cudaArrayCubemap);
cudaMemcpy3DParms myparms = { };
myparms.srcPos = make_cudaPos(, , );
myparms.dstPos = make_cudaPos(, , );
myparms.srcPtr = make_cudaPitchedPtr(h_data, width * sizeof(float), width, width);
myparms.dstArray = cu_3darray;
myparms.extent = make_cudaExtent(width, width, num_faces);
myparms.kind = cudaMemcpyHostToDevice;
cudaMemcpy3D(&myparms); // 设置纹理参数并绑定
tex.addressMode[] = cudaAddressModeWrap;
tex.addressMode[] = cudaAddressModeWrap;
tex.filterMode = cudaFilterModeLinear;
tex.normalized = true;
cudaBindTextureToArray(tex, cu_3darray, channelDesc); dim3 dimBlock(, , );
dim3 dimGrid(width / dimBlock.x, width / dimBlock.y, );
printf("\n\tCubemap data of %d * %d * %d: Grid size is %d x %d, each block has 8 x 8 threads.\n", width, width, num_layers, dimGrid.x, dimGrid.y);
transformKernel << < dimGrid, dimBlock >> >(d_data, width);// 预跑
cudaDeviceSynchronize(); StopWatchInterface *timer = NULL;// 新的计时工具
sdkCreateTimer(&timer);
sdkStartTimer(&timer); transformKernel << < dimGrid, dimBlock, >> >(d_data, width);
cudaDeviceSynchronize(); sdkStopTimer(&timer);
printf("\n\Time: %.3f msec, %.2f Mtexlookups/sec\n", sdkGetTimerValue(&timer), (cubemap_size / (sdkGetTimerValue(&timer) / 1000.0f) / 1e6));
sdkDeleteTimer(&timer); // 返回计算结果并检验
memset(h_data, , size);
cudaMemcpy(h_data, d_data, size, cudaMemcpyDeviceToHost);
if (checkCmdLineFlag(argc, (const char **)argv, "regression"))
sdkWriteFile<float>("./data/regression.dat", h_data, width * width, 0.0f, false);
else
printf("Comparing kernel output to expected data return %d\n", compareData(h_data, h_data_ref, cubemap_size, MIN_EPSILON_ERROR, 0.0f)); printf("\n\tActual output data\n\t");
for (int i = ; i < width * num_faces * num_layers; i++)
{
printf("%2.1f ", h_data[i]);
if ((i + ) % width == )
printf("\n\t");
if ((i + ) % (width * width) == )
printf("\n\t");
} free(h_data);
free(h_data_ref);
cudaFree(d_data);
cudaFreeArray(cu_3darray); getchar();
return ;
}
▶ 输出结果
Input data.n 0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0 9.0 10.0 11.0 12.0 13.0 14.0 15.0 16.0 17.0 18.0 19.0 20.0 21.0 22.0 23.0 24.0 25.0 26.0 27.0 28.0 29.0 30.0 31.0 32.0 33.0 34.0 35.0 36.0 37.0 38.0 39.0 40.0 41.0 42.0 43.0 44.0 45.0 46.0 47.0 48.0 49.0 50.0 51.0 52.0 53.0 54.0 55.0 56.0 57.0 58.0 59.0 60.0 61.0 62.0 63.0
64.0 65.0 66.0 67.0 68.0 69.0 70.0 71.0 72.0 73.0 74.0 75.0 76.0 77.0 78.0 79.0 80.0 81.0 82.0 83.0 84.0 85.0 86.0 87.0 88.0 89.0 90.0 91.0 92.0 93.0 94.0 95.0 96.0 97.0 98.0 99.0 100.0 101.0 102.0 103.0 104.0 105.0 106.0 107.0 108.0 109.0 110.0 111.0 112.0 113.0 114.0 115.0 116.0 117.0 118.0 119.0 120.0 121.0 122.0 123.0 124.0 125.0 126.0 127.0
128.0 129.0 130.0 131.0 132.0 133.0 134.0 135.0 136.0 137.0 138.0 139.0 140.0 141.0 142.0 143.0 144.0 145.0 146.0 147.0 148.0 149.0 150.0 151.0 152.0 153.0 154.0 155.0 156.0 157.0 158.0 159.0 160.0 161.0 162.0 163.0 164.0 165.0 166.0 167.0 168.0 169.0 170.0 171.0 172.0 173.0 174.0 175.0 176.0 177.0 178.0 179.0 180.0 181.0 182.0 183.0 184.0 185.0 186.0 187.0 188.0 189.0 190.0 191.0
192.0 193.0 194.0 195.0 196.0 197.0 198.0 199.0 200.0 201.0 202.0 203.0 204.0 205.0 206.0 207.0 208.0 209.0 210.0 211.0 212.0 213.0 214.0 215.0 216.0 217.0 218.0 219.0 220.0 221.0 222.0 223.0 224.0 225.0 226.0 227.0 228.0 229.0 230.0 231.0 232.0 233.0 234.0 235.0 236.0 237.0 238.0 239.0 240.0 241.0 242.0 243.0 244.0 245.0 246.0 247.0 248.0 249.0 250.0 251.0 252.0 253.0 254.0 255.0
256.0 257.0 258.0 259.0 260.0 261.0 262.0 263.0 264.0 265.0 266.0 267.0 268.0 269.0 270.0 271.0 272.0 273.0 274.0 275.0 276.0 277.0 278.0 279.0 280.0 281.0 282.0 283.0 284.0 285.0 286.0 287.0 288.0 289.0 290.0 291.0 292.0 293.0 294.0 295.0 296.0 297.0 298.0 299.0 300.0 301.0 302.0 303.0 304.0 305.0 306.0 307.0 308.0 309.0 310.0 311.0 312.0 313.0 314.0 315.0 316.0 317.0 318.0 319.0
320.0 321.0 322.0 323.0 324.0 325.0 326.0 327.0 328.0 329.0 330.0 331.0 332.0 333.0 334.0 335.0 336.0 337.0 338.0 339.0 340.0 341.0 342.0 343.0 344.0 345.0 346.0 347.0 348.0 349.0 350.0 351.0 352.0 353.0 354.0 355.0 356.0 357.0 358.0 359.0 360.0 361.0 362.0 363.0 364.0 365.0 366.0 367.0 368.0 369.0 370.0 371.0 372.0 373.0 374.0 375.0 376.0 377.0 378.0 379.0 380.0 381.0 382.0 383.0 Ideal output data
0.0 -1.0 -2.0 -3.0 -4.0 -5.0 -6.0 -7.0 -8.0 -9.0 -10.0 -11.0 -12.0 -13.0 -14.0 -15.0 -16.0 -17.0 -18.0 -19.0 -20.0 -21.0 -22.0 -23.0 -24.0 -25.0 -26.0 -27.0 -28.0 -29.0 -30.0 -31.0 -32.0 -33.0 -34.0 -35.0 -36.0 -37.0 -38.0 -39.0 -40.0 -41.0 -42.0 -43.0 -44.0 -45.0 -46.0 -47.0 -48.0 -49.0 -50.0 -51.0 -52.0 -53.0 -54.0 -55.0 -56.0 -57.0 -58.0 -59.0 -60.0 -61.0 -62.0 -63.0
-64.0 -65.0 -66.0 -67.0 -68.0 -69.0 -70.0 -71.0 -72.0 -73.0 -74.0 -75.0 -76.0 -77.0 -78.0 -79.0 -80.0 -81.0 -82.0 -83.0 -84.0 -85.0 -86.0 -87.0 -88.0 -89.0 -90.0 -91.0 -92.0 -93.0 -94.0 -95.0 -96.0 -97.0 -98.0 -99.0 -100.0 -101.0 -102.0 -103.0 -104.0 -105.0 -106.0 -107.0 -108.0 -109.0 -110.0 -111.0 -112.0 -113.0 -114.0 -115.0 -116.0 -117.0 -118.0 -119.0 -120.0 -121.0 -122.0 -123.0 -124.0 -125.0 -126.0 -127.0
-128.0 -129.0 -130.0 -131.0 -132.0 -133.0 -134.0 -135.0 -136.0 -137.0 -138.0 -139.0 -140.0 -141.0 -142.0 -143.0 -144.0 -145.0 -146.0 -147.0 -148.0 -149.0 -150.0 -151.0 -152.0 -153.0 -154.0 -155.0 -156.0 -157.0 -158.0 -159.0 -160.0 -161.0 -162.0 -163.0 -164.0 -165.0 -166.0 -167.0 -168.0 -169.0 -170.0 -171.0 -172.0 -173.0 -174.0 -175.0 -176.0 -177.0 -178.0 -179.0 -180.0 -181.0 -182.0 -183.0 -184.0 -185.0 -186.0 -187.0 -188.0 -189.0 -190.0 -191.0
-192.0 -193.0 -194.0 -195.0 -196.0 -197.0 -198.0 -199.0 -200.0 -201.0 -202.0 -203.0 -204.0 -205.0 -206.0 -207.0 -208.0 -209.0 -210.0 -211.0 -212.0 -213.0 -214.0 -215.0 -216.0 -217.0 -218.0 -219.0 -220.0 -221.0 -222.0 -223.0 -224.0 -225.0 -226.0 -227.0 -228.0 -229.0 -230.0 -231.0 -232.0 -233.0 -234.0 -235.0 -236.0 -237.0 -238.0 -239.0 -240.0 -241.0 -242.0 -243.0 -244.0 -245.0 -246.0 -247.0 -248.0 -249.0 -250.0 -251.0 -252.0 -253.0 -254.0 -255.0
-256.0 -257.0 -258.0 -259.0 -260.0 -261.0 -262.0 -263.0 -264.0 -265.0 -266.0 -267.0 -268.0 -269.0 -270.0 -271.0 -272.0 -273.0 -274.0 -275.0 -276.0 -277.0 -278.0 -279.0 -280.0 -281.0 -282.0 -283.0 -284.0 -285.0 -286.0 -287.0 -288.0 -289.0 -290.0 -291.0 -292.0 -293.0 -294.0 -295.0 -296.0 -297.0 -298.0 -299.0 -300.0 -301.0 -302.0 -303.0 -304.0 -305.0 -306.0 -307.0 -308.0 -309.0 -310.0 -311.0 -312.0 -313.0 -314.0 -315.0 -316.0 -317.0 -318.0 -319.0
-320.0 -321.0 -322.0 -323.0 -324.0 -325.0 -326.0 -327.0 -328.0 -329.0 -330.0 -331.0 -332.0 -333.0 -334.0 -335.0 -336.0 -337.0 -338.0 -339.0 -340.0 -341.0 -342.0 -343.0 -344.0 -345.0 -346.0 -347.0 -348.0 -349.0 -350.0 -351.0 -352.0 -353.0 -354.0 -355.0 -356.0 -357.0 -358.0 -359.0 -360.0 -361.0 -362.0 -363.0 -364.0 -365.0 -366.0 -367.0 -368.0 -369.0 -370.0 -371.0 -372.0 -373.0 -374.0 -375.0 -376.0 -377.0 -378.0 -379.0 -380.0 -381.0 -382.0 -383.0 Cubemap data of * * : Grid size is x , each block has x threads. Time: 0.098 msec, 249.50 Mtexlookups/sec
Comparing kernel output to expected data return Actual output data
-0.0 -1.0 -2.0 -3.0 -4.0 -5.0 -6.0 -7.0 -8.0 -9.0 -10.0 -11.0 -12.0 -13.0 -14.0 -15.0 -16.0 -17.0 -18.0 -19.0 -20.0 -21.0 -22.0 -23.0 -24.0 -25.0 -26.0 -27.0 -28.0 -29.0 -30.0 -31.0 -32.0 -33.0 -34.0 -35.0 -36.0 -37.0 -38.0 -39.0 -40.0 -41.0 -42.0 -43.0 -44.0 -45.0 -46.0 -47.0 -48.0 -49.0 -50.0 -51.0 -52.0 -53.0 -54.0 -55.0 -56.0 -57.0 -58.0 -59.0 -60.0 -61.0 -62.0 -63.0
-64.0 -65.0 -66.0 -67.0 -68.0 -69.0 -70.0 -71.0 -72.0 -73.0 -74.0 -75.0 -76.0 -77.0 -78.0 -79.0 -80.0 -81.0 -82.0 -83.0 -84.0 -85.0 -86.0 -87.0 -88.0 -89.0 -90.0 -91.0 -92.0 -93.0 -94.0 -95.0 -96.0 -97.0 -98.0 -99.0 -100.0 -101.0 -102.0 -103.0 -104.0 -105.0 -106.0 -107.0 -108.0 -109.0 -110.0 -111.0 -112.0 -113.0 -114.0 -115.0 -116.0 -117.0 -118.0 -119.0 -120.0 -121.0 -122.0 -123.0 -124.0 -125.0 -126.0 -127.0
-128.0 -129.0 -130.0 -131.0 -132.0 -133.0 -134.0 -135.0 -136.0 -137.0 -138.0 -139.0 -140.0 -141.0 -142.0 -143.0 -144.0 -145.0 -146.0 -147.0 -148.0 -149.0 -150.0 -151.0 -152.0 -153.0 -154.0 -155.0 -156.0 -157.0 -158.0 -159.0 -160.0 -161.0 -162.0 -163.0 -164.0 -165.0 -166.0 -167.0 -168.0 -169.0 -170.0 -171.0 -172.0 -173.0 -174.0 -175.0 -176.0 -177.0 -178.0 -179.0 -180.0 -181.0 -182.0 -183.0 -184.0 -185.0 -186.0 -187.0 -188.0 -189.0 -190.0 -191.0
-192.0 -193.0 -194.0 -195.0 -196.0 -197.0 -198.0 -199.0 -200.0 -201.0 -202.0 -203.0 -204.0 -205.0 -206.0 -207.0 -208.0 -209.0 -210.0 -211.0 -212.0 -213.0 -214.0 -215.0 -216.0 -217.0 -218.0 -219.0 -220.0 -221.0 -222.0 -223.0 -224.0 -225.0 -226.0 -227.0 -228.0 -229.0 -230.0 -231.0 -232.0 -233.0 -234.0 -235.0 -236.0 -237.0 -238.0 -239.0 -240.0 -241.0 -242.0 -243.0 -244.0 -245.0 -246.0 -247.0 -248.0 -249.0 -250.0 -251.0 -252.0 -253.0 -254.0 -255.0
-256.0 -257.0 -258.0 -259.0 -260.0 -261.0 -262.0 -263.0 -264.0 -265.0 -266.0 -267.0 -268.0 -269.0 -270.0 -271.0 -272.0 -273.0 -274.0 -275.0 -276.0 -277.0 -278.0 -279.0 -280.0 -281.0 -282.0 -283.0 -284.0 -285.0 -286.0 -287.0 -288.0 -289.0 -290.0 -291.0 -292.0 -293.0 -294.0 -295.0 -296.0 -297.0 -298.0 -299.0 -300.0 -301.0 -302.0 -303.0 -304.0 -305.0 -306.0 -307.0 -308.0 -309.0 -310.0 -311.0 -312.0 -313.0 -314.0 -315.0 -316.0 -317.0 -318.0 -319.0
-320.0 -321.0 -322.0 -323.0 -324.0 -325.0 -326.0 -327.0 -328.0 -329.0 -330.0 -331.0 -332.0 -333.0 -334.0 -335.0 -336.0 -337.0 -338.0 -339.0 -340.0 -341.0 -342.0 -343.0 -344.0 -345.0 -346.0 -347.0 -348.0 -349.0 -350.0 -351.0 -352.0 -353.0 -354.0 -355.0 -356.0 -357.0 -358.0 -359.0 -360.0 -361.0 -362.0 -363.0 -364.0 -365.0 -366.0 -367.0 -368.0 -369.0 -370.0 -371.0 -372.0 -373.0 -374.0 -375.0 -376.0 -377.0 -378.0 -379.0 -380.0 -381.0 -382.0 -383.0
▶ 涨姿势
● helper_time.h 中新定义的计时函数
// 关键步骤
StopWatchInterface *timer = NULL;
sdkCreateTimer(&timer);
sdkStartTimer(&timer); sdkStopTimer(&timer);
sdkGetTimerValue(&timer);
sdkDeleteTimer(&timer); // helper_time.h
class StopWatchInterface
{
public:
StopWatchInterface() {};
virtual ~StopWatchInterface() {}; public:
virtual void start() = ;
virtual void stop() = ;
virtual void reset() = ;
virtual float getTime() = ;// 获取计时(计时器不停)
virtual float getAverageTime() = ;
}; inline bool sdkCreateTimer(StopWatchInterface **timer_interface)
{
#if defined(WIN32) || defined(_WIN32) || defined(WIN64) || defined(_WIN64)
*timer_interface = (StopWatchInterface *)new StopWatchWin();
#else
*timer_interface = (StopWatchInterface *)new StopWatchLinux();
#endif
return (*timer_interface != NULL) ? true : false;
} inline bool sdkDeleteTimer(StopWatchInterface **timer_interface)
{
if (*timer_interface)
{
delete *timer_interface;
*timer_interface = NULL;
}
return true;
} inline bool sdkStartTimer(StopWatchInterface **timer_interface)
{
if (*timer_interface)
(*timer_interface)->start();
return true;
} inline bool sdkStopTimer(StopWatchInterface **timer_interface)
{
if (*timer_interface)
(*timer_interface)->stop();
return true;
} inline float sdkGetTimerValue(StopWatchInterface **timer_interface)
{
if (*timer_interface)
return (*timer_interface)->getTime();
else
return 0.0f;
}
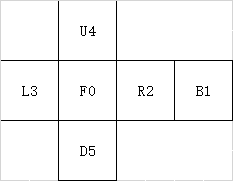
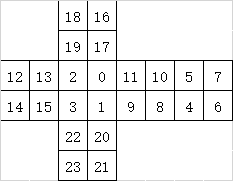
● 立方体纹理贴图。六个面分别为 x = 1 正面、x = -1 轴负面、y = 1 正面、y = -1 负面、z = 1 正面、x = -1 负面,对应前、后、右、左、上、下。按照线性下标 [0, width * width * 6 - 1] 顺序访问时,各元素存储位置如下图所示(width == 2 为例)。
0_Simple__simpleCubemapTexture的更多相关文章
随机推荐
- BZOJ5340: [Ctsc2018]假面【概率+期望】【思维】
LINK 思路 首先考虑减血,直接一个dp做过去,这个部分分不难拿 然后是\(op=1\)的部分 首先因为要知道每个人被打的概率,所以需要算出这个人活着的时候有多少个人活着时概率是什么 那么用\(g_ ...
- VLOOKUP函数的使用方法
VLOOKUP(lookup_value,table_array,col_index_num,range_lookup) lookup_value:为在查找范围的第一列中要查找的值.比如下图的 C2 ...
- smarty中调用php内置函数
http://blog.csdn.net/clevercode/article/details/50373633
- STORJ 有实际应用
STORJ 有实际应用,Filezilla 支持 STORJ 的分布式协议.
- 【转】每天一个linux命令(15):tail 命令
原文网址:http://www.cnblogs.com/peida/archive/2012/11/07/2758084.html tail 命令从指定点开始将文件写到标准输出.使用tail命令的-f ...
- spring 使用 maven profile
先看看 maven 定义 profile 的写法 <!-- profiles --> <profiles> <profile> <activation> ...
- jp@gc - Stepping Thread Group 字段说明
1. 安装好插件 参考文档“扩展Jmeter插件获取更多监听器” 2. 添加线程组 右键测试计划->添加->Threads(Users)->jp@gc - Stepping ...
- linux 标准I/O (二)
<Uinx 环境高级编程笔记> 以前经常遇到两种I/O操作 一类是f打头的fopen, fread, fwrite 一类是没有f打头的open, read, fwrite 原来一个是U ...
- linux 守护进程(daemon process)代码-详细注释
1. 进程组 组长不能创建新的 会话. 其它进程可以创建新的会话,创建后既成为会话首领,同时失去控制终端. 2. 会话首领可以重新打开控制终端 1 #include <stdio.h> 2 ...
- 2018-2019 网络对抗技术 20165226 Exp4:恶意代码分析
2018-2019 网络对抗技术 20165226 Exp4:恶意代码分析 目录 一.实验内容说明及基础问题回答 二.实验过程 Task1 系统运行监控 结合windows计划任务与netstat命令 ...