运动规划 (Motion Planning): MoveIt! 与 OMPL---44
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei
最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错误怎么解决。表面上看,解决这些问题的方法就是提供正确的代码,正确的编译方法,正确的运行步骤。
然而,这种解决方法只能解决这个特定的问题,而且解决之后我们也无法学到一些实际的东西。要想彻底明白,需要从源头入手,也就是说,不要问“MoveIt! 怎么把机械手从空间一个点移到另一个点?“,而是要问”MoveIt! 为什么能把机械手从空间一个点移到另一个点?“。 这一点明白之后,遇到类似的问题,才能从容应对。同理,这不仅适用于MoveIt,也同样适用于其他任何ROS功能。
所以,下文中我们会见到一些具体的例子,但整体上,更倾向于宏观的概念和一些基础的方法,希望对大家能有所帮助。这里的帮助指的是增强对运动规划和Moveit, OMPL的整体理解,而非局限于完成某一个功能,编译运行某一个文件。
RRT) 和 Probabilistic Roadmap (PRM)了, 当然,这两个是比较老的,还有很多其他新算法。
- OMPL能做什么?
简单说,就是提供一个运动轨迹。给定一个机器人结构(假设有N个关节),给定一个目标(比如终端移到xyz),给定一个环境,那么OMPL会提供给你一个
轨迹,包含M个数组,每一个数组长度是N,也就是一个完整的关节位置。沿着这个轨迹依次移动关节,就可以最终把终端移到xyz,当然,这个轨迹应当不与环
境中的任何障碍发生碰撞。 - 为什么用OMPL? 运动规划的软件库和算法有很多,而OMPL由于其模块化的设计和稳定的更新,成为最流行的规划软件库之一。很多新算法都在OMPL开发。很多其他软件(包括ROS/MoveIt)都使用OMPL做运动规划。
1.3. 逆运动学 (Inverse Kinematics)
- 什么是逆运动学(IK)?简单说,就是把终端位姿变成关节角度,q=IK(p)。p是终端位姿(xyz),q是关节角度。
cd path_to_catkin_ws/src
catkin_create_pkg lwr_description
cd lwr_description
mkdir urdf将下载好的lwr_simplified.urdf放入urdf文件夹中,这样一个urdf package便创建好了。
2.2 MoveIt!配置助手 (MoveIt! Setup Assistant)
2.2.1 打开MoveIt! Setup Assistantroslaunch moveit_setup_assistant setup_assistant.launch

MoveIt! Setup Assistant 是一个图形界面,可以让我们不用写代码看代码,直接用鼠标点击就可以配置机器人的运动规划所需要的信息。点击Create New MoveIt Configuration Package来创建新的配置包,选择刚刚下载的urdf,然后点击Load Files 载入文件。
2.2.2 创建碰撞免检矩阵(ACM)
点击Setup
Assisant的左边第二项'Self-Collisions',在这里我们将创建碰撞免检矩阵(Avoid Collision Matrix,
ACM)。再次强调,怎么创建很简单,点击一下'Regenerate Default Collision Matrix'就可以了,问题是,为什么?ACM是做什么的?
我们知道,碰撞检测是非常复杂的运算过程。对于多关节机械臂或者类人机器人来说,机械结构复杂,肢体多,碰撞检测
需要涉及很多的空间几何计算。但是对于刚体机器人来说,有些肢体之间是不可能发生碰撞的,比如原本就相邻的肢体,比如类人机器人的脚和头。这里生成的
ACM就是告诉我们,这个URDF所描述的机器人,哪些肢体之间是不会发生碰撞的。那么在之后的碰撞检测算法中,我们就可以略过对这些肢体之间的检测,以
提高检测效率。2.2.3 创建虚拟关节 (Virtual Joints)
在Setup Assistant 第三项Virtual Joints里面,我们要创建所谓的虚拟关节。这个虚拟关节,可以理解为一个连接机器人和世界的关节。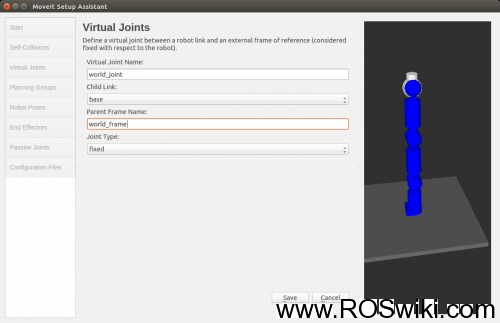
一般来说,Virtual Joint
Name我们命名为‘world_joint’,而'Child
Link'指的是我们要把‘世界’和机器人的那个部位连接,那么很显然我们选择基座'base'。‘Parent Frame
Name’,是世界坐标的名字,在ROS中一般叫'world_frame'。关节类型 Joint Type, 很显然这里我们选择固定Fixed.
代表机器人相对于世界是固定的。而另外两种, Planar指的是平面移动底座(xy平面+角度),用于移动机器人比如PR2;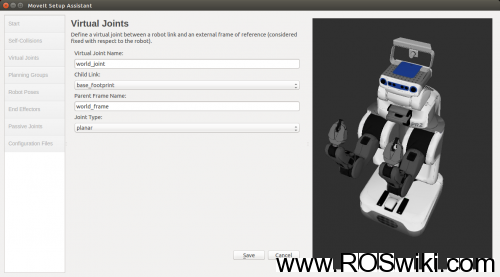 还有一种Floating, 指的是浮动基座(xyz position+orientation),比如类人机器人。2.2.4 创建规划群 (Planning Groups)创建Planning Group是MoveIt的核心之一。首先,点击Add Group, 我们会看到一个界面,如下图,
还有一种Floating, 指的是浮动基座(xyz position+orientation),比如类人机器人。2.2.4 创建规划群 (Planning Groups)创建Planning Group是MoveIt的核心之一。首先,点击Add Group, 我们会看到一个界面,如下图,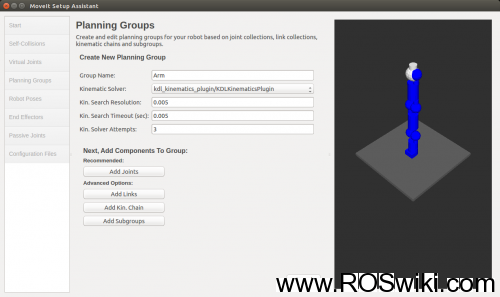
那么这些都是什么呢?- Group Name: 不用多说,名字。。。我们就叫Arm。
- Kinematic Solver: 运动学求解工具,这个就是负责求解正向运动学(Forward Kinematics)和逆运动学(IK, 见1.3节)的。 一般我们选用KDL, The Kinematics and Dynamics Library。这是一个运动学与动力学的库,可以很好的解决6自由度以上的单链机械结构的正逆运动学问题。当然你也可以用其他IK Solver, 比如SRV或者IK_FAST,甚至你可以自己开发新的Solver然后插入进来,如果有空,我以后会发帖讲解如何创建新的运动学求解库并插入到MoveIt。
- Kin. Search Resolution: 关节空间的采样密度
- Kin. Search TImeout: 求解时间
- Kin. Solver Attempts: 求解失败尝试次数,一般来说这三项使用默认值就可以。你也可以根据具体需要做出适当调整。
接下来,我们要正式创建这个组群,有很多不同的方法,Add Joints, Add Links, Add Kin. Chain, Add Subgroups。我们这里选择'Add Kin. Chain',这样我们可以清楚的看到整个机器人的机械机构,
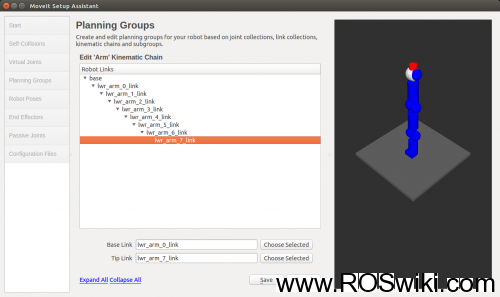
在正中方我们可以看到这个机械臂的结构,一个link接着一个
link。下方我们可以看到有'Base Link'和'Tip
Link',我们选择'lwr_arm_0_link'作为Base,选择'lwr_arm_7_link'作为Tip.
然后点击Save,这样一个规划组群就创建好了。同样的,我们可以再创建一个手的组群(Hand),这一次我们用Add
Links,然后选择'lwr_arm_7_link'。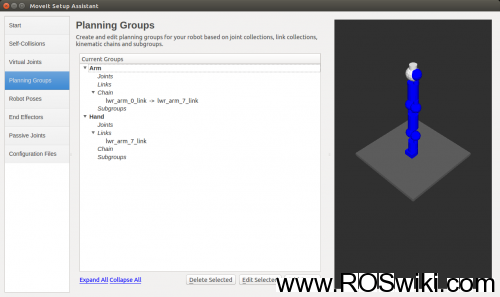
2.2.5 创建机器人预设位姿 (Robot Poses)
在Setup
Assistant 第五项, ‘Robot Poses’,我们创建预设的机器人位姿。点击‘Add
Pose’,我们为机械臂创建一个向上直立的位姿UpRight,选择Planning
Group为Arm。可以看到很多滚动条,全设为0就是垂直向上的位姿。然后点击保存。当然,你可以根据需要设置其他不同位姿。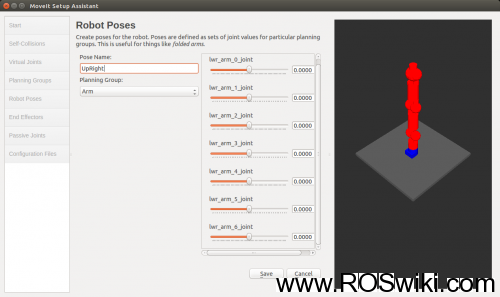
2.2.6 配置终端控制器(End Effectors)
终
端控制器,就是机械臂的手,以后用来在工作环境中直接控制的部位。我们添加一个叫做HandEff的终端控制器,End Effector
Group选择之前创建好的Hand,Parent_Link选择机械臂的最后一个肢体lwr_arm_7_link。Parent
Group选择Arm。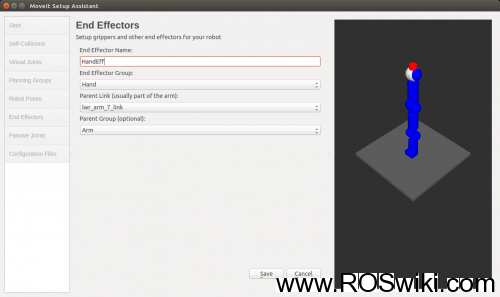
2.2.7 配置被动关节(Passive Joints)
所谓被动关节,就是指现实中不配置电机的关节,也就是不会出现在机器人的Joint State Msg里,以避免MoveIt与JointState出现匹配错误。这里我们的LWR机械臂并没有此类被动关节,所以可以直接跳过。2.2.8 生成配置文件(Configuration Files)
最后一步,在Configuration Package Save Path里面选择一个保存地址,一般我们把他放在path_to_catkin_ws/src/lwr_moveit_config然后点击Generate Package,这样一个完整的MoveIt Configuration Package就创建好了!先不要急着运行,我们先来看看都生成了哪些东西,还有一些重要的配置参数都是在哪定义的。三. MoveIt 配置包详解
打开刚刚创建好的lwr_moveit_config文件夹,我们发现有config和launch两个文件夹。3.1 MoveIt! 配置文件先看config,里面有- fake_controllers.yaml:这是虚拟控制器配置文件,方便我们在没有实体机器人,甚至没有任何模拟器(如gazebo)开启的情况下也能运行MoveIt。
- joint_limits.yaml:这里记录了机器人各个关节的位置速度加速度的极限,这些都会被用于以后的规划中。
- kinematics.yaml:这里就是上一章2.2.4里面设置的东西,用于初始化运动学求解库
- lwr.srdf:这个是一个重要的MoveIt配置文件,我们将在下一节详解。
- ompl_planning.yaml:这里是配置OMPL各种算法的各种参数。
3.2 SRDF文件
SRDF是moveit的配置文件,配合URDF使用。打开lwr.srdf,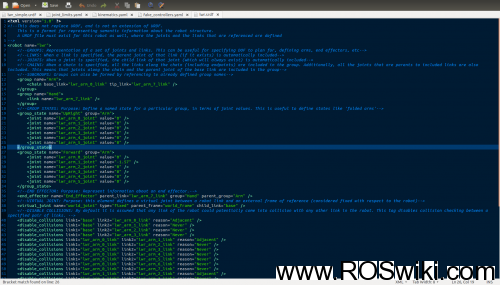 我
我
们可以看到这是一个xml格式的配置文件,根是robot,并有一个属性值name='lwr'。下面各个项目应该很明显,就是我们刚刚在Setup
Assistant里面所设置的东西,包含了组群,位姿,终端控制器,虚拟关节,以及碰撞免测矩阵ACM的定义。理论上,只要有了srdf和urdf,我
们就可以完全定义一个机器人moveit信息。3.3 Launch文件下面,我们看看launch文件夹,一打开发现有很多文件,瞬间不想看了。。不要急,我们来看看几个重要的文件。
3.3.1 demo.launch
demo是运行的总结点,打开我们可以看到他include了其他的launch文件。其中第14行说,如果有需
要,发布静态的tf。比如说,你的机器人基座不在世界坐标的原点,你可以发布一个静态tf来描述机器人在世界坐标中的位置。第17-21行,就是我们发布
虚拟机器人状态的地方了,当然,如果你有实体机器人或者有gazebo之类的模拟器,你需要去掉这一部分,有其他相应的节点来发布机器人状态。26-32
行运行了另一个moveit重要的节点,move group。3.3.2 move_group.launch
顾名思义,move
group的功能是让一个规划组群动起来。怎么动,那就要做运动规划了,在move_group.launch第24-26行定义了运动规划库的使用,我
们可以看到,默认的是使用ompl运动规划库。同样的,如果以后有时间,我会发帖详解如何创建新的运动规划库插件并让moveit使用其他的运动规划算
法。其他的都是设置一些基本参数,暂时可以略过。3.3.3 planning_context.launch
这里我们可以看到,定义了所使用的urdf和srdf文件,以及运动学求解库。不建议手动更改这些,但是如果你需要使用不同的urdf,srdf,可以在这里更改。3.3.4 setup_assistant.launch
如果你需要更改一些配置,那么可以直接运行roslaunch lwr_moveit_config setup_assistant.launch
这样就可以基于当前设置做更改,而不是重新设置。
四. 运行MoveIt!
4.1 Launch Demo
现在我们可以来尝试运行moveit了!roslaunch lwr_moveit_config demo.launch
等待几秒,当看到 All is well! Everyone is happy! You can start planning now! 的时候,就代表启动成功了。我们可以看到一个Rivz窗口,左下角有一个运动规划MotionPlanning模块。
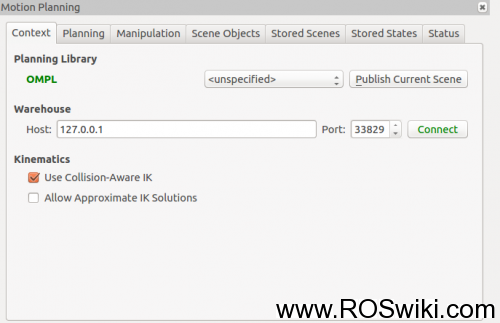 第一个进入视野的就是Planning Library, OMPL。没错,这里告诉你当前用的是OMPL运动规划算法。在中间的下来菜单里面有很多的具体算法,之后你可以尝试不同的算法,看看他们的区别。4.2 选择目标位姿如果如上文第二章中设置,你会在rviz主窗口中看到一个互动标记位于机械臂终端位置。移动这个标记到另外一个地方,你可以看到一个橙色的目标位姿(每一次移动标记,就运行了一次逆运动学IK求解过程)。
第一个进入视野的就是Planning Library, OMPL。没错,这里告诉你当前用的是OMPL运动规划算法。在中间的下来菜单里面有很多的具体算法,之后你可以尝试不同的算法,看看他们的区别。4.2 选择目标位姿如果如上文第二章中设置,你会在rviz主窗口中看到一个互动标记位于机械臂终端位置。移动这个标记到另外一个地方,你可以看到一个橙色的目标位姿(每一次移动标记,就运行了一次逆运动学IK求解过程)。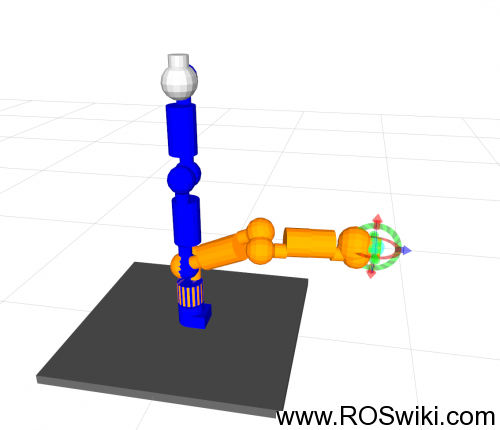 同样的,你也可以在MotionPlanning模块下的Planning子模块写的Query子模块里面设置随机的或者预设的目标位置。
同样的,你也可以在MotionPlanning模块下的Planning子模块写的Query子模块里面设置随机的或者预设的目标位置。4.3 运动规划终于,到了运动规划的时候了。。在Planning子模块中单击
[ INFO] [1453481861.884163555]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884336258]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884489778]: LBKPIECE1: Starting planning with states already in datastructure
[ INFO] [1453481861.884523826]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884547702]: LBKPIECE1: Starting planning with states already in datastructure
[ INFO] [1453481861.884564358]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884587404]: LBKPIECE1: Starting planning with states already in datastructure
[ INFO] [1453481861.884604829]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884626253]: LBKPIECE1: Starting planning with states already in datastructure
[ INFO] [1453481861.905034917]: LBKPIECE1: Created ( start + goal) states in cells ( start ( on boundary) + goal ( on boundary))
[ INFO] [1453481861.905633020]: LBKPIECE1: Created ( start + goal) states in cells ( start ( on boundary) + goal ( on boundary))
[ INFO] [1453481861.913846457]: LBKPIECE1: Created ( start + goal) states in cells ( start ( on boundary) + goal ( on boundary))
[ INFO] [1453481861.914639489]: LBKPIECE1: Created ( start + goal) states in cells ( start ( on boundary) + goal ( on boundary))
[ INFO] [1453481861.948016518]: ParallelPlan::solve(): Solution found by one or more threads in 0.063719 seconds我们可以看到,本次运动规划使用了LBKPIECE算法,并且使用了4线程并行规划,规划时间为1
(noname)+++++
* obs1.dae mesh -0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 0.0315993 0.7 0.8
0.706825 0.707388
0.5
* obs2.dae mesh -0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 0.0315993 0.6 0.5 0.8
0.706825 0.707388
0.5
* obs3.dae mesh -0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 0.0315993 0.3 0.8
0.999784 0.0207948
0.5
* table.dae mesh -0.420619 0.0420619 -0.841237
-0.420619 -0.0420619 -0.841237
-0.420619 0.0420619 0.841237
-0.420619 -0.0420619 0.841237
0.420619 0.0420619 0.841237
0.420619 -0.0420619 -0.841237
0.420619 0.0420619 -0.841237
0.420619 -0.0420619 0.841237
-0.420619 0.0420619 0.841237
-0.420619 -0.0420619 0.841237
0.420619 -0.0420619 0.841237
0.420619 0.0420619 0.841237
0.420619 -0.0420619 -0.841237
-0.420619 -0.0420619 -0.841237
-0.420619 0.0420619 -0.841237
0.420619 0.0420619 -0.841237
-0.420619 -0.0420619 0.841237
-0.420619 -0.0420619 -0.841237
0.420619 -0.0420619 -0.841237
0.420619 -0.0420619 0.841237
0.420619 0.0420619 -0.841237
-0.420619 0.0420619 -0.841237
-0.420619 0.0420619 0.841237
0.420619 0.0420619 0.841237 0.7 0.63
0.706825 0.707388
0.5 0.5
* target mesh -0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 0.0315993 0.6 0.2 0.8
0.706825 0.707388 .然后在SceneObjects模块中点击ImportFromText,选择刚刚创建的demo.scene文件,一个简单的桌面环境就被导入进了rviz。你可以通过选择各个物体,来调整他们的位置。回到Context子模块,点击Publish Current Scene,将当前的环境发布出去。然后再次点击Plan,你会看到一条不同的轨迹,这一轨迹应该绕过所有障碍物并且达到目标位姿。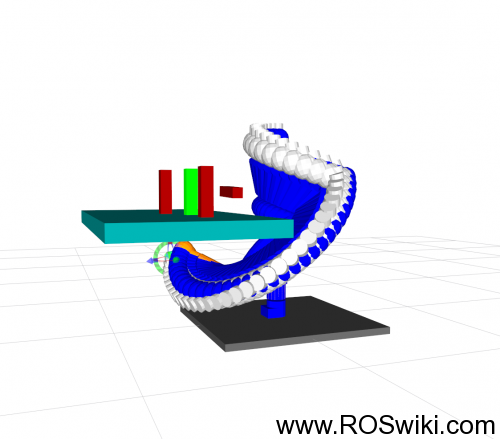
因为OMPL是采样算法,由于其随机采样的特性,每次的路径是不同的,如下图。而且有可能失败。
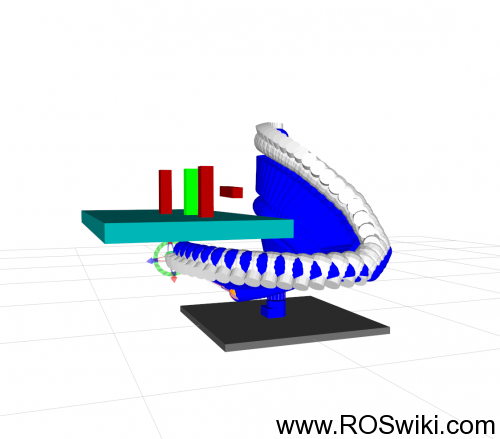
接下来可以尝试不同的OMPL算法,不同的目标位姿和不同的环境。来看看MoveIt的鲁棒性如何。
那么,MoveIt!和OMPL的运动规划就差不多讲完了,当然这是很浅显的,与实用性的东西都还有距离。以上都是纯手打,现做的例子,希望有所帮助。接下来该讲什么,你们可以在下面留言,是更深入的讲MoveIt!,还是讲OMPL运动规划算法,还是讲如何模拟具体实例。
运动规划 (Motion Planning): MoveIt! 与 OMPL---44的更多相关文章
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 运动规划(Motion Planning)
相关介绍: https://mp.weixin.qq.com/s?__biz=MzA5MDE2MjQ0OQ==&mid=2652786406&idx=1&sn=f937dd6a ...
- MoveIt运动规划-1
按照帮助文档Setup Assistant Tutorial中的描述,用moveit_setup_assistant图形界面一步步配置机器人,最后生成机器人的配置文件保存到指定的文件夹中. 以UR5机 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- Grassfire算法- 运动规划(Motion planning)
Grassfire算法: 一.概念 这个算法是做图像处理的抽骨架处理,目的是求出图像的骨架,可以想象一片与物体形状相同的草,沿其外围各点同时点火.当火势向内蔓延,向前推进的火线相遇处各点的轨迹就是中 ...
- 如何用MoveIt快速搭建机器人运动规划平台?
MoveIt = RobotGo,翻译成中文就是“机器人,走你!”所以,MoveIt的主要就是一款致力于让机器人能够自主运动及其相关技术的软件,它的所有模块都是围绕着运动规划的实现而设计的. 两个月前 ...
- 泡泡一分钟:Automatic Parameter Tuning of Motion Planning Algorithms
Automatic Parameter Tuning of Motion Planning Algorithms 运动规划算法的自动参数整定 Jos´e Cano, Yiming Yang, Brun ...
- 泡泡一分钟:Motion Planning for a Small Aerobatic Fixed-Wing Unmanned Aerial Vehicle
Motion Planning for a Small Aerobatic Fixed-Wing Unmanned Aerial Vehicle Joshua Levin, Aditya Paranj ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
随机推荐
- anconda使用---使用conda管理python环境
一.动机 最近打算折腾vn.py,但只有py27版本的,因为一向习惯使用最新稳定版的,所以不得不装py27的环境,不得不说 Python的全局锁真的很烦. 身为懒癌患者,必然使用全功能的anacond ...
- "No user exists for uid 501"
"No user exists for uid 501" 问题表现:git操作远端失败. iterm2的问题,更改了配置可能导致这个问题,最简单的解决办法,退出客户端后重启.重 ...
- JS 二维数组排序
<script> //测试方法 var a = [ {name:'hdj', age:128}, {name:'hdj1', age:28}, {name:'hdj1', age:78}, ...
- Java设计模式(12)迭代模式(Iterator模式)
上了这么多年学,我发现一个问题,好象老师都很喜欢点名,甚至点名都成了某些老师的嗜好,一日不点名,就饭吃不香,觉睡不好似的,我就觉得很奇怪,你的课要是讲的好,同学又怎么会不来听课呢,殊不知:“误人子弟, ...
- JAVA多线程笔试题
一.题目内容 二.我的答案 利用了线程池.考虑了超时处理.不知道这样写是否还有其他问题,或者更好更优的解决方案? import java.util.*; import java.util.concur ...
- Python 类的多继承
#类的多继承 ''' 与c++不同,python的类经过优化,多继承时不会产生方法二义性 ''' #python中所有的类都是默认继承于object类 class A(object): def tes ...
- USB2.0学习笔记连载(五):EZ-USB重要寄存器的配置
本篇博客主要讲解EZ-USB一些重要寄存器的配置,首先对于本篇博客所讲的内容,读者应该到官网上去下载相关的手册,其中包括<EZ-USB Technical Reference Manual> ...
- android下通过app名字打开程序(activity)链接
Version:0.9 StartHTML:-1 EndHTML:-1 StartFragment:00000099 EndFragment:00004599 1.手机遥控器模拟快捷键启动app 刚开 ...
- Python之生成二面体群元素
from sympy.combinatorics.named_groups import DihedralGroup from collections import Counter n = 12 G ...
- 【转】【Centos】Centos下用upstart管理自己的服务程序
Upstart是Ubuntu用来进行服务进程管理的服务,本文介绍如何利用upstart来通过Centos操作系统管理我们自己开发的应用程序. 什么时候要管理我们的应用程序?当我们开发出服务类的应用程序 ...