1120 机器人走方格 V3(组合数)
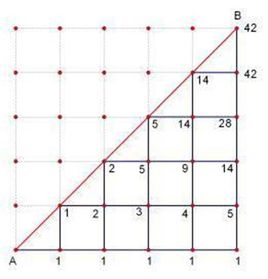
题目实际上是求catalan数的,Catalan[n] = C(2*n,n) / (n+1) = C(2*n,n) % mod * inv[n+1],inv[n+1]为n+1的逆元,根据费马小定理,可以通过快速幂快速求出。
因为n的数据范围较大,所以要用到卢卡斯定理:若p为素数,那么C(m,n)%p = C(m/p,n/p) * C(m%p,n%p) % p.从而我们可以递归的可以求出C(m,n),当n==0,返回1.
因为方格含有两个三角形,所以Catalan[n]*2 即是最终答案
#include<stdio.h>
#include<math.h>
#include<vector>
#include<stack>
#include<set>
#include<string.h>
#include<iostream>
#include<algorithm>
#define MAXSIZE 10005
#define INF 0x3f3f3f3f
using namespace std;
#define LL long long
const LL mod = 1e4+;
LL inv[mod+]; LL Pow(LL n,LL m)
{
n %= mod;
LL ans = ;
while(m>)
{
if(m%)
ans = (ans*n)%mod;
n = (n*n)%mod;
m /= ;
}
return ans;
} LL C(LL m,LL n) //对mod取模后,m,n的值均小于1e4+7,直接求组合即可
{
if(n > m)
return ;
LL ans = ;
for(int i=; i<=n; i++)
{
ans = ans*(m-i+)%mod*inv[i]%mod;
}
return ans;
} LL Lucas(LL n, LL m) //卢卡斯定理
{
if(m==)
return ;
return Lucas(n/mod,m/mod)%mod*C(n%mod,m%mod)%mod;
} LL Solve(LL n)
{
LL ans = Lucas(*n,n)%mod;
LL Inv = Pow(n+,mod-); //inv(n+1)
ans = ans%mod*Inv%mod;
return ans * % mod;
} int main()
{
for(int i=; i<=mod; i++)
inv[i] = Pow(i,mod-); //预处理求出逆元
LL n;
scanf("%lld",&n);
LL ans = Solve(n-);
printf("%lld\n",ans);
return ;
}
1120 机器人走方格 V3(组合数)的更多相关文章
- 51nod 1120 机器人走方格V3
1120 机器人走方格 V3 基准时间限制:1 秒 空间限制:131072 KB 分值: 80 难度:5级算法题 收藏 关注 N * N的方格,从左上到右下画一条线.一个机器人从左上走到右下,只 ...
- 1120 机器人走方格 V3
1120 机器人走方格 V3 基准时间限制:1 秒 空间限制:131072 KB N * N的方格,从左上到右下画一条线.一个机器人从左上走到右下,只能向右或向下走.并要求只能在这条线的上面或下面走, ...
- 51nod 1120 机器人走方格 V3 【卡特兰数+卢卡斯定理+组合数】
-我并不知道为什么事卡特兰数,反正用dp打的表就是卡特兰数,因为是两个三角所以再乘个2 卡特兰数使用\( h(n)=\frac{C_{2n}^{n}}{n+1} \)因为范围比较大所以组合数部分用卢卡 ...
- 51nod 1120 机器人走方格 V3 卡特兰数 lucas定理
N * N的方格,从左上到右下画一条线.一个机器人从左上走到右下,只能向右或向下走.并要求只能在这条线的上面或下面走,不能穿越这条线,有多少种不同的走法?由于方法数量可能很大,只需要输出Mod 100 ...
- 51nod 1120 机器人走方格 V3
N * N的方格,从左上到右下画一条线.一个机器人从左上走到右下,只能向右或向下走. 并要求只能在这条线的上面或下面走,不能穿越这条线,有多少种不同的走法? 由于方法数量可能很大,只需要输出Mod 1 ...
- 机器人走方格 V3
1120 . 机器人走方格 V3 基准时间限制:1 秒 空间限制:65536 KB 分值: 160 N * N的方格,从左上到右下画一条线.一个机器人从左上走到右下,只能向右或向下走.并要求只能在 ...
- 51nod1120 机器人走方格 V3
跟括号序列是一样的,将向右走看成是左括号向左走看成是右括号就可以了.那么就是卡特兰数了.然后由于n和m太大所以用了lucas定理 //跟括号序列是一样的,将向右走看成是左括号向左走看成是右括号就可以了 ...
- 51nod_1120:机器人走方格 V3
题目链接:https://www.51nod.com/onlineJudge/questionCode.html#!problemId=1120 Catalan数 基础题,ans=C(2n-2,n-2 ...
- 51Nod 机器人走方格 V3 —— 卡特兰数、Lucas定理
题目链接:http://www.51nod.com/onlineJudge/questionCode.html#!problemId=1120 题解: 1.看到这种题,马上就想到了卡特兰数.但卡特兰数 ...
随机推荐
- .net core iis配置
微软官方教程: https://docs.microsoft.com/en-us/aspnet/core/publishing/iis?tabs=aspnetcore2x 在vs中创建.net cor ...
- Redis详解(三)------ redis的五大数据类型详细用法
我们说 Redis 相对于 Memcache 等其他的缓存产品,有一个比较明显的优势就是 Redis 不仅仅支持简单的key-value类型的数据,同时还提供list,set,zset,hash等数据 ...
- Top Page
Top Page 由于个人的博客中涉及了几个不同的领域.今后准备设置Index页进行一番整理 : 所有其他页面都可以从这个页面遍历 Top Page
- Logstash filter 插件之 grok
本文简单介绍一下 Logstash 的过滤插件 grok. Grok 的主要功能 Grok 是 Logstash 最重要的插件.它可以解析任意文本并把它结构化.因此 Grok 是将非结构化的日志数据解 ...
- PostgreSql扩展Sql-动态加载共享库(C函数)
基于 psql (PostgreSQL) 10.4 pg_language表定义了函数实现所使用的语言.主要支持了C语言和SQL语句.一些可选的语言包括pl/pgsql.tcl和perl. ligan ...
- Oracle伪列(ROWNUM)的使用
先看一个题:查询emp表的信息,显示前5行数据,这时候我们就需要使用伪列(rownum)的概念. rownum在数据表并不是一个真实的列,其实每一行应该都有一个行号,这个伪列就是用来记录这个行号的,这 ...
- Python的各种推导式合集
推导式的套路 之前我们已经学习了最简单的列表推导式和生成器表达式.但是除此之外,其实还有字典推导式.集合推导式等等. 下面是一个以列表推导式为例的推导式详细格式,同样适用于其他推导式. variabl ...
- 第二部分之AOF持久化(第十一章)
AOF持久化是通过保存Redis服务器所执行的写命令来记录数据库状态的.被写入AOF文件的所有命令都是以Redis的命令请求协议格式(纯文本)保存的. 一,AOF持久化的实现 1.命令追加 当AOF持 ...
- mybatis 使用注解简化xml映射文件
目录 关于mybatis注解 初次简单使用mybatis注解示例 利用注解实现指定映射 使用注解实现表间关联(1对1) 关于mybatis注解 注解在java中特别常见,mybatis中也支持注解. ...
- centos7之关于时间和日期以及时间同步的应用
在CentOS 6版本,时间设置有date.hwclock命令,从CentOS 7开始,使用了一个新的命令timedatectl. 基本概念: 一.GMT.UTC.CST.DST 时间 UTC 整个地 ...