OpenGL坐标系的理解
搬运自:
https://learnopengl-cn.github.io/01%20Getting%20started/08%20Coordinate%20Systems/#3d
为了将坐标从一个坐标系变换到另一个坐标系,我们需要用到几个变换矩阵,最重要的几个分别是模型(Model)、观察(View)、投影(Projection)三个矩阵。我们的顶点坐标起始于局部空间(Local Space),在这里它称为局部坐标(Local Coordinate),它在之后会变为世界坐标(World Coordinate),观察坐标(View Coordinate),裁剪坐标(Clip Coordinate),并最后以屏幕坐标(Screen Coordinate)的形式结束。下面的这张图展示了整个流程以及各个变换过程做了什么:
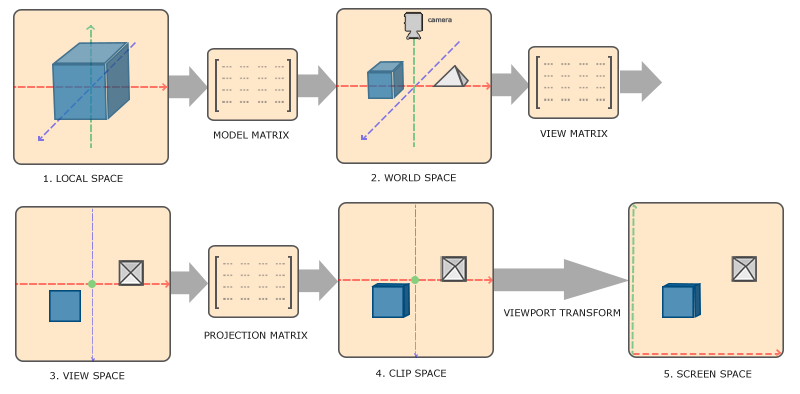
- 局部坐标是对象相对于局部原点的坐标,也是物体起始的坐标。
- 下一步是将局部坐标变换为世界空间坐标,世界空间坐标是处于一个更大的空间范围的。这些坐标相对于世界的全局原点,它们会和其它物体一起相对于世界的原点进行摆放。
- 接下来我们将世界坐标变换为观察空间坐标,使得每个坐标都是从摄像机或者说观察者的角度进行观察的。
- 坐标到达观察空间之后,我们需要将其投影到裁剪坐标。裁剪坐标会被处理至-1.0到1.0的范围内,并判断哪些顶点将会出现在屏幕上。
- 最后,我们将裁剪坐标变换为屏幕坐标,我们将使用一个叫做视口变换(Viewport Transform)的过程。视口变换将位于-1.0到1.0范围的坐标变换到由glViewport函数所定义的坐标范围内。最后变换出来的坐标将会送到光栅器,将其转化为片段。
1,局部空间(Local Space):
局部空间是指物体所在的坐标空间,即对象最开始所在的地方。想象你在一个建模软件(比如说Blender)中创建了一个立方体。你创建的立方体的原点有可能位于(0, 0, 0),即便它有可能最后在程序中处于完全不同的位置。甚至有可能你创建的所有模型都以(0, 0, 0)为初始位置(译注:然而它们会最终出现在世界的不同位置)。所以,你的模型的所有顶点都是在局部空间中:它们相对于你的物体来说都是局部的。
我们一直使用的那个箱子的顶点是被设定在-0.5到0.5的坐标范围中,(0, 0)是它的原点。这些都是局部坐标。
2,世界空间(World Space):
个人理解世界坐标就相当于我们地球的上的经纬度,每个位置都有自己的经度和纬度,也不会重复。
(1)该网站给出的理解:
如果我们将我们所有的物体导入到程序当中,它们有可能会全挤在世界的原点(0, 0, 0)上,这并不是我们想要的结果。我们想为每一个物体定义一个位置,从而能在更大的世界当中放置它们。世界空间中的坐标正如其名:是指顶点相对于(游戏)世界的坐标。如果你希望将物体分散在世界上摆放(特别是非常真实的那样),这就是你希望物体变换到的空间。物体的坐标将会从局部变换到世界空间;该变换是由模型矩阵(Model Matrix)实现的。
模型矩阵是一种变换矩阵,它能通过对物体进行位移、缩放、旋转来将它置于它本应该在的位置或朝向。你可以将它想像为变换一个房子,你需要先将它缩小(它在局部空间中太大了),并将其位移至郊区的一个小镇,然后在y轴上往左旋转一点以搭配附近的房子。你也可以把上一节将箱子到处摆放在场景中用的那个矩阵大致看作一个模型矩阵;我们将箱子的局部坐标变换到场景/世界中的不同位置。
(2)另外一种理解:世界空间相对于其他坐标空间来说是固定不变的。所以,它也被用作空间变换的参考系。我们把它的坐标系称为世界坐标系。在没有特别说明的情况下,我们用来描述一个几何对象(点、向量或坐标)的数值数据,都是基于世界坐标系来设定的。
世界坐标系用矩阵来表示就是一个单位矩阵。
3,观察空间(View Space):
观察空间就是我们肉眼所看到的,或者我们玩fps游戏时候,自己屏幕所能看到的
观察空间经常被人们称之OpenGL的摄像机(Camera)(所以有时也称为摄像机空间(Camera Space)或视觉空间(Eye Space))。观察空间是将世界空间坐标转化为用户视野前方的坐标而产生的结果。因此观察空间就是从摄像机的视角所观察到的空间。而这通常是由一系列的位移和旋转的组合来完成,平移/旋转场景从而使得特定的对象被变换到摄像机的前方。这些组合在一起的变换通常存储在一个观察矩阵(View Matrix)里,它被用来将世界坐标变换到观察空间。在下一节中我们将深入讨论如何创建一个这样的观察矩阵来模拟一个摄像机。
4,裁剪空间(Clip Space)
个人理解:由于我们肉眼所能看到的视野是有限的,所以我们在fps游戏中,所能看到的东西也是有限的,距离远的比较小的东西就会忽略掉,类似于LOD的层级?
官方网站给出来的解释:在一个顶点着色器运行的最后,OpenGL期望所有的坐标都能落在一个特定的范围内,且任何在这个范围之外的点都应该被裁剪掉(Clipped)。被裁剪掉的坐标就会被忽略,所以剩下的坐标就将变为屏幕上可见的片段。这也就是裁剪空间(Clip Space)名字的由来。
因为将所有可见的坐标都指定在-1.0到1.0的范围内不是很直观,所以我们会指定自己的坐标集(Coordinate Set)并将它变换回标准化设备坐标系,就像OpenGL期望的那样。
为了将顶点坐标从观察变换到裁剪空间,我们需要定义一个投影矩阵(Projection Matrix),它指定了一个范围的坐标,比如在每个维度上的-1000到1000。投影矩阵接着会将在这个指定的范围内的坐标变换为标准化设备坐标的范围(-1.0, 1.0)。所有在范围外的坐标不会被映射到在-1.0到1.0的范围之间,所以会被裁剪掉。在上面这个投影矩阵所指定的范围内,坐标(1250, 500, 750)将是不可见的,这是由于它的x坐标超出了范围,它被转化为一个大于1.0的标准化设备坐标,所以被裁剪掉了。
由投影矩阵创建的观察箱(Viewing Box)被称为平截头体(Frustum),每个出现在平截头体范围内的坐标都会最终出现在用户的屏幕上。将特定范围内的坐标转化到标准化设备坐标系的过程(而且它很容易被映射到2D观察空间坐标)被称之为投影(Projection),因为使用投影矩阵能将3D坐标投影(Project)到很容易映射到2D的标准化设备坐标系中。
一旦所有顶点被变换到裁剪空间,最终的操作——透视除法(Perspective Division)将会执行,在这个过程中我们将位置向量的x,y,z分量分别除以向量的齐次w分量;透视除法是将4D裁剪空间坐标变换为3D标准化设备坐标的过程。这一步会在每一个顶点着色器运行的最后被自动执行。
在这一阶段之后,最终的坐标将会被映射到屏幕空间中(使用glViewport中的设定),并被变换成片段。
5,把它们都组合到一起
我们为上述的每一个步骤都创建了一个变换矩阵:模型矩阵、观察矩阵和投影矩阵。一个顶点坐标将会根据以下过程被变换到裁剪坐标:

注意矩阵运算的顺序是相反的(记住我们需要从右往左阅读矩阵的乘法)。最后的顶点应该被赋值到顶点着色器中的gl_Position,OpenGL将会自动进行透视除法和裁剪。
6,图形学中的3D坐标系:右手坐标系(Right-handed System)
按照惯例,OpenGL是一个右手坐标系。简单来说,就是正x轴在你的右手边,正y轴朝上,而正z轴是朝向后方的。想象你的屏幕处于三个轴的中心,则正z轴穿过你的屏幕朝向你。坐标系画起来如下:
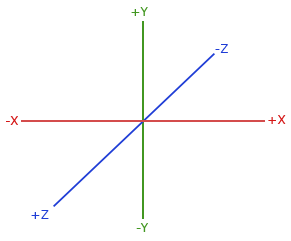
为了理解为什么被称为右手坐标系,按如下的步骤做:
- 沿着正y轴方向伸出你的右臂,手指着上方。
- 大拇指指向右方。
- 食指指向上方。
- 中指向下弯曲90度。
如果你的动作正确,那么你的大拇指指向正x轴方向,食指指向正y轴方向,中指指向正z轴方向。如果你用左臂来做这些动作,你会发现z轴的方向是相反的。这个叫做左手坐标系,它被DirectX广泛地使用。注意在标准化设备坐标系中OpenGL实际上使用的是左手坐标系(投影矩阵交换了左右手)。
OpenGL坐标系的理解的更多相关文章
- OpenGL中各种坐标系的理解[转]
OPENGL坐标系可分为:世界坐标系和当前绘图坐标系. 世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的.你面对 屏幕,你的右边是x正轴,上面是y正轴,屏幕 ...
- OpenGL中各种坐标系的理解
转载:https://blog.csdn.net/meegomeego/article/details/8686816 OPENGL坐标系可分为:世界坐标系和当前绘图坐标系. 世界坐标系以屏幕中心为原 ...
- OpenGL坐标系之间的转换 http://blog.csdn.net/sac761/article/details/52179585
1. OpenGL 渲染管线 OpenGL渲染管线分为两大部分,模型观测变换(ModelView Transformation)和投影变换(Projection Transformation).做个比 ...
- cocos2d-x 屏幕坐标系和OPenGL坐标系转换
转自:http://home.cnblogs.com/group/topic/57609.html cocos2d坐标系(OPenGL坐标系):以左下角为原点,x向右,y向上 屏幕坐标系(androi ...
- openGL 坐标系的互相转换
openGL坐标系包括旋转,平移,缩放被塞在一个矩阵里面. 坐标系之间的转换基础是矩阵的运算. 每个矩阵代表的坐标系,就是是原点坐标系通过旋转.平移,缩放得到的坐标系. 当一个矩阵右乘一个向量或是还有 ...
- OpenGL中坐标系的理解(一)
在OpenGL中,存在着至少存在着三种矩阵,对应着函数glMatrixMode()的三个参数:GL_MODELVIEW,GL_PROJECTION,GL_TEXTURE. 以下主要描述GL_MODEL ...
- opengl的矩阵理解
原文链接:http://blog.csdn.net/byhuang/article/details/1476199 矩阵真的是一个很神奇的数学工具, 虽然单纯从数学上看, 它并没有什么特别的意义, 但 ...
- [OpenGL]OpenGL坐标系和坐标变换
OpenGL通过摄像机的模拟.要实现一个三维计算机图形重大转变,这是几何变换(模型转换-查看转型(两者统称为几何变换)).投影.作物转型.口变换等.同一时候,OpenGL还实现了矩阵堆栈等.理解掌握了 ...
- OpenGL的状态机理解
OpenGL是一种状态机模式,比如你用glEnable打开一个状态,在以后的绘图中将一直保留并应用这个状态,除非你调用glDisable及同类函数来改变该状态或程序退出.例如当前颜色是一个状态变量,可 ...
随机推荐
- lua 5.3.5 安装/初体验
安装 官网http://www.lua.org/start.html 参考 https://blog.csdn.net/qq_23954569/article/details/70879672 cd ...
- react props与render成员函数
props是组件固有的属性集合,其数据由外部传入,一般在整个组件的生命周期中都是只读的,React的API顶层设计也决定了这一点.属性初值通常由React.createElement函数或者JSX中标 ...
- 2018-2019-2 网络对抗技术 20165303 Exp1 PC平台逆向破解(BOF实验)
1.实践目的 本次实践的对象是一个名为pwn1的linux可执行文件. 三个实践内容如下: 手工修改可执行文件,改变程序执行流程,直接跳转到getShell函数. 利用foo函数的Bof漏洞,构造一个 ...
- libcrypto.so.1.0.0: no version information available
openssl-1.0.1p源码安装后,依赖于openssl.so库的应用报错libcrypto.so.1.0.0: no version information available 解法:1. 创建 ...
- LDA(线性判别分类器)学习笔记
Linear Discriminant Analysis(线性判别分类器)是对费舍尔的线性鉴别方法(FLD)的归纳,属于监督学习的方法. LDA的基本思想是将高维的模式样本投影到最佳鉴别矢量空间,以达 ...
- Petrozavodsk Winter Camp, Day 8, 2014, Ship
$dp(i,j)$表示i-j这段还没运走时的状态,包括 运输了多少次,还剩多少空间 每次枚举运输左边还是右边转移 #include <bits/stdc++.h> #define rep( ...
- 因为没有安装xcode,得不到xcode证书报错
新接的一个项目.在从gitlab上clone代码的时候报错: Agreeing to the Xcode/iOS license requires admin privileges, please r ...
- css中position 定位的兼容性,以及定位的使用及层级的应用
一.首先我们来看看定位的兼容性,当然是在IE6.7但是现在大多数公司都已经不考虑了 我们就作为一个了解吧: 1.在IE67下,子元素有相对定位的话,父级的overflow:hidden包不住子元素 解 ...
- 在ibatis中时间段查询完整代码
ibatis.xml文件中的代码如下: <typeAlias alias="ServInvokeTest" type="com.entity.ServInvokeT ...
- java Comparable and Comparator
1.Comparable简介 此接口对实现它的每个类的对象强加一个总排序.这种排序被称为类的自然排序,类的compareTo方法被称为其自然比较方法.可以通过 Collections.sort(和Ar ...