第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch。
2.在虚拟机端启动 roslaunch opencv_apps edge_detection.launch 进行边缘提取采集。
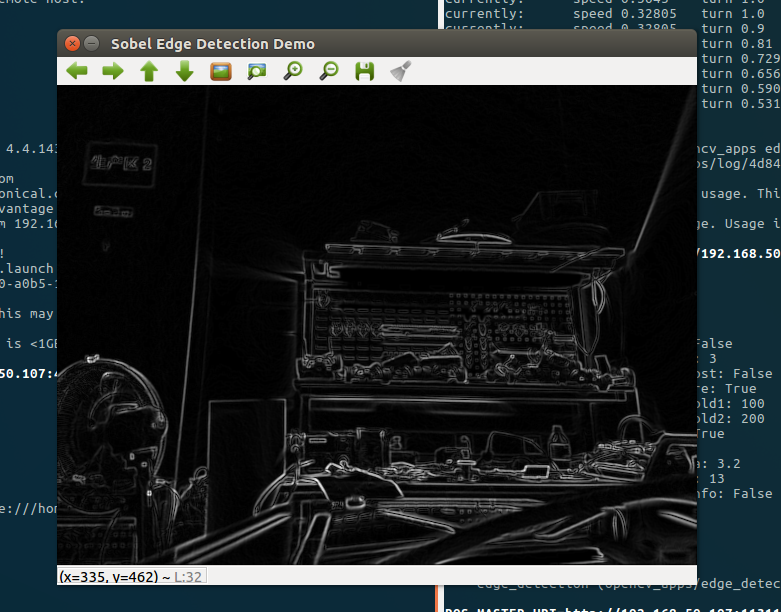
效果如下:
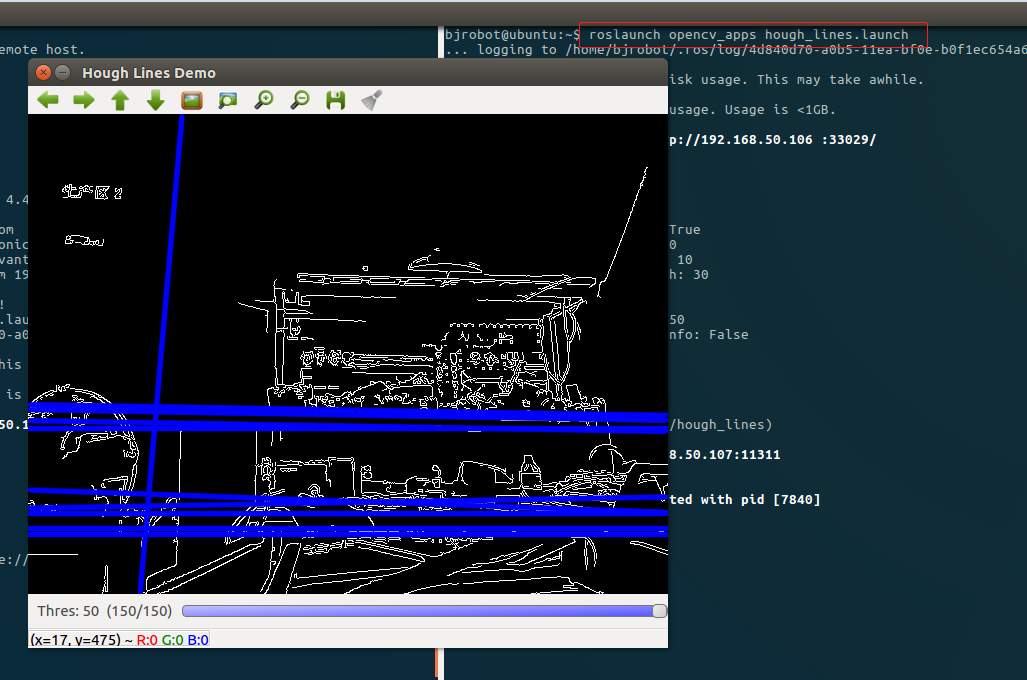
3.在虚拟机端启动 roslaunch opencv_apps hough_lines.launch 进行哈夫变换直线检测。
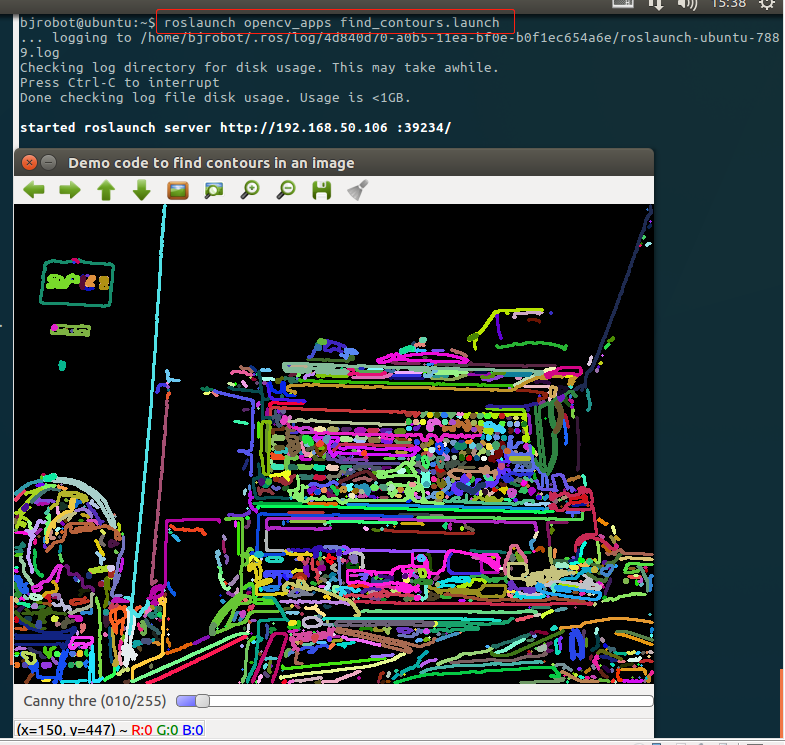
4.在虚拟机端启动 roslaunch opencv_apps find_contours.launch 进行霍夫变换日元检测

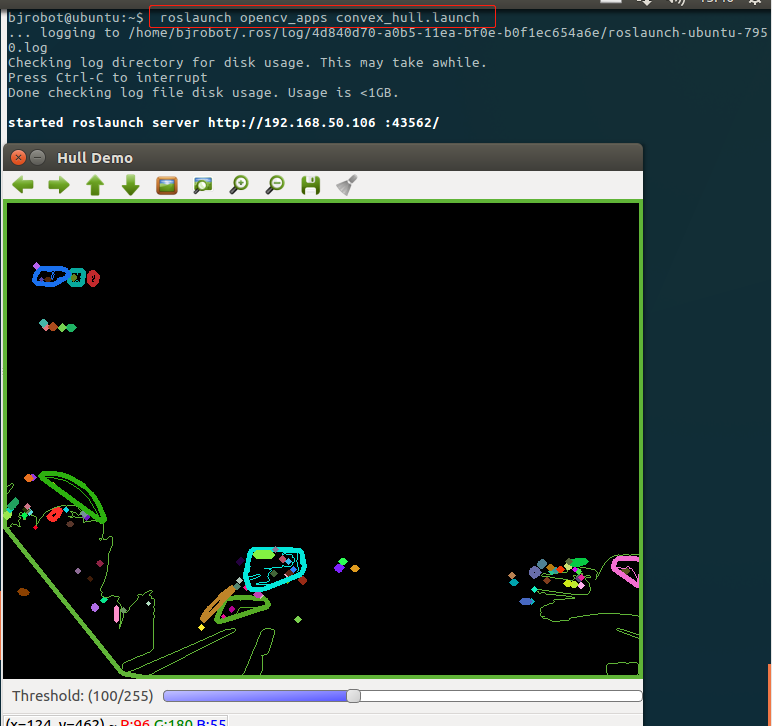
5.虚拟机端启动 roslaunch opencv_apps convex_hull.launch 进行凸包检测
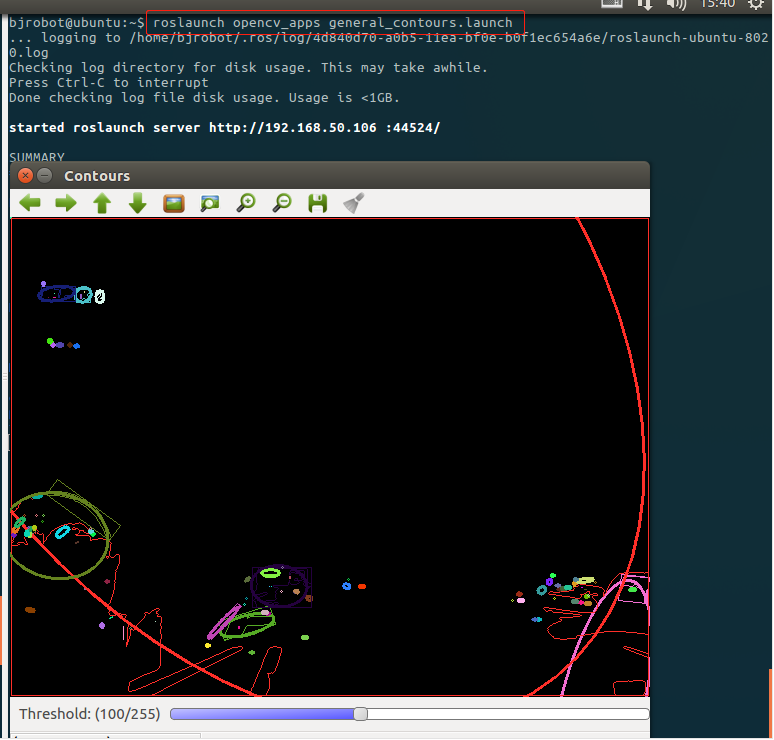
6.在虚拟机端启动 roslaunch opencv_apps general_contours.launch 进行椭圆形检测。
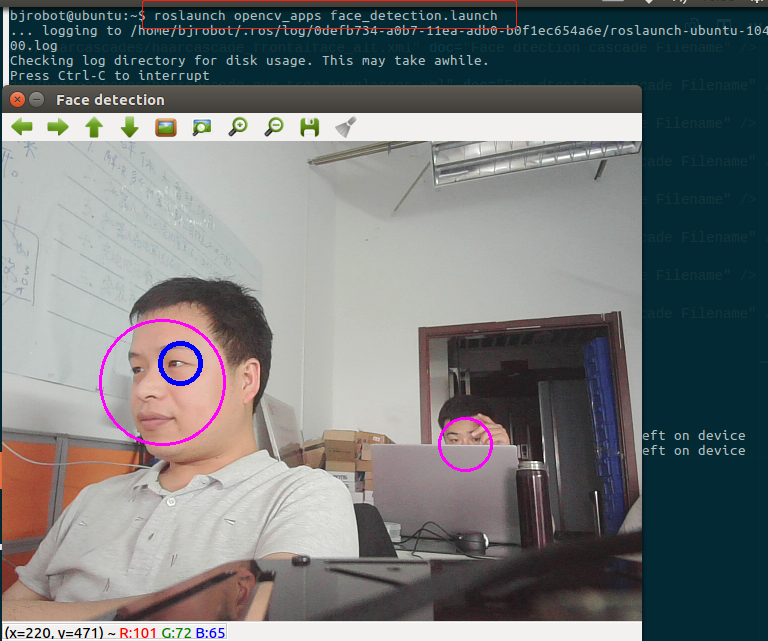
7.在虚拟机端启动 roslaunch opencv_apps face_detection.launch 进行人脸检测
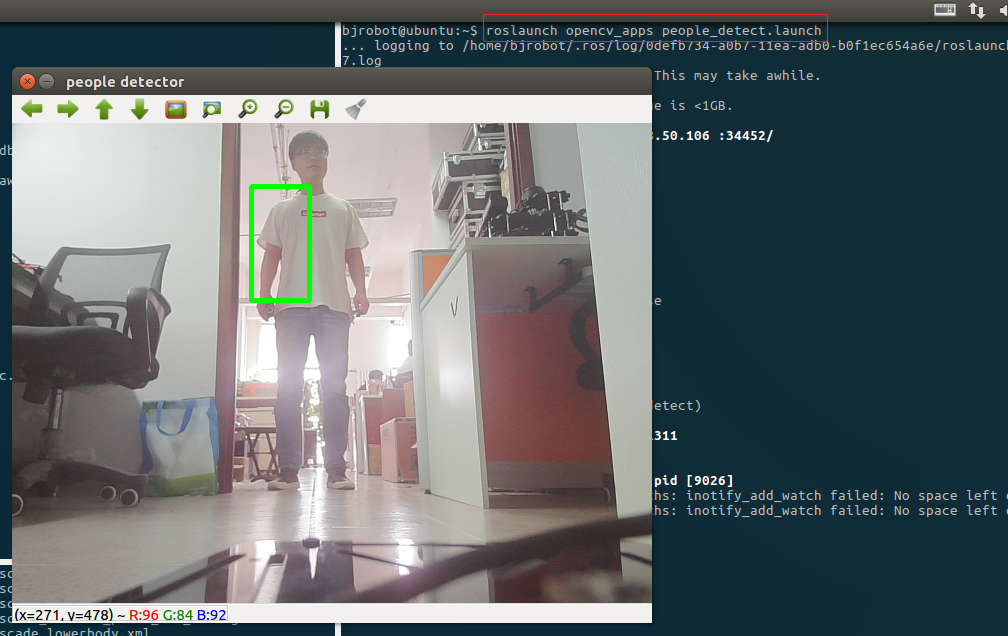
8.在虚拟机端启动 roslaunch opencv_apps people_detect.launch hot 特征量进行人的检测。
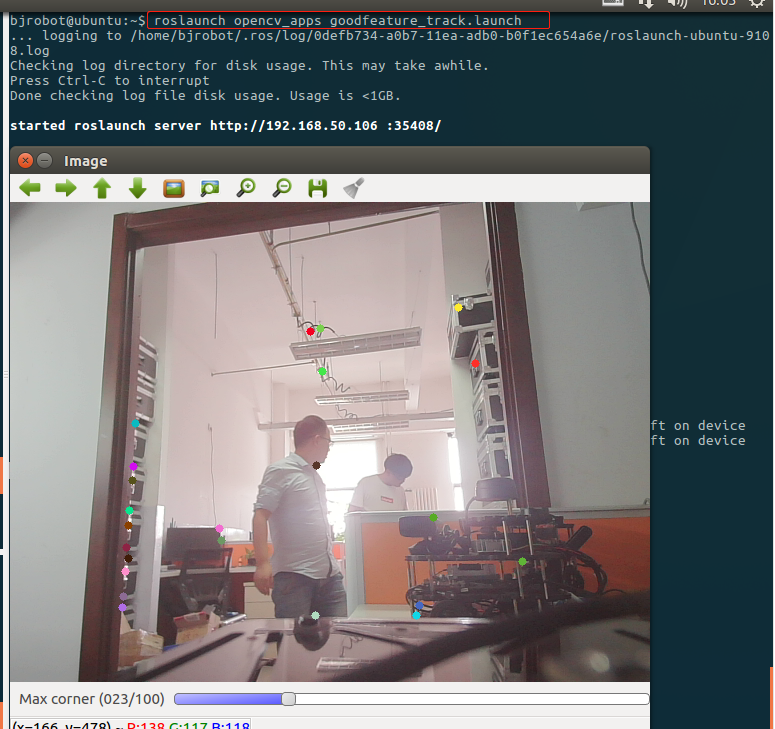
9.在虚拟机端启动 roslaunch opencv_apps goodfeature_track.launch 进行动作特征分析。
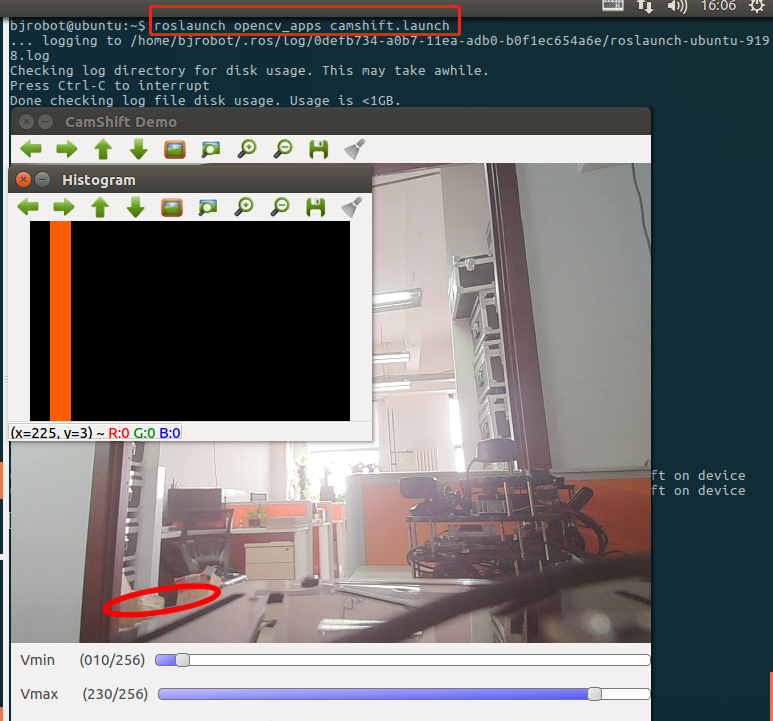
10在虚拟机端启动 roslaunch opencv_apps camshift.launch 进行颜色检测。
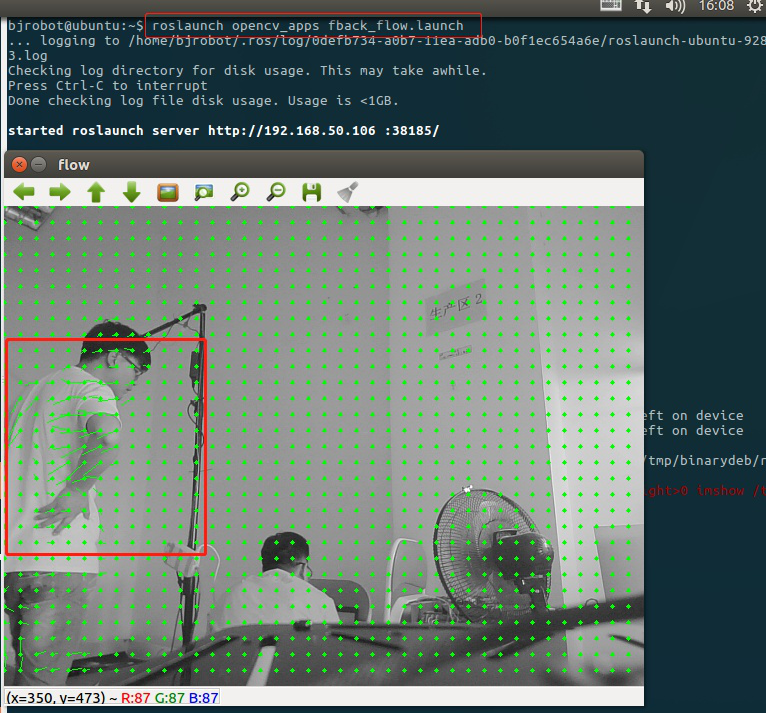
11.在虚拟机端启动roslaunch opencv_apps fback_flow.launch 进行gunnar farneback (optle)检测
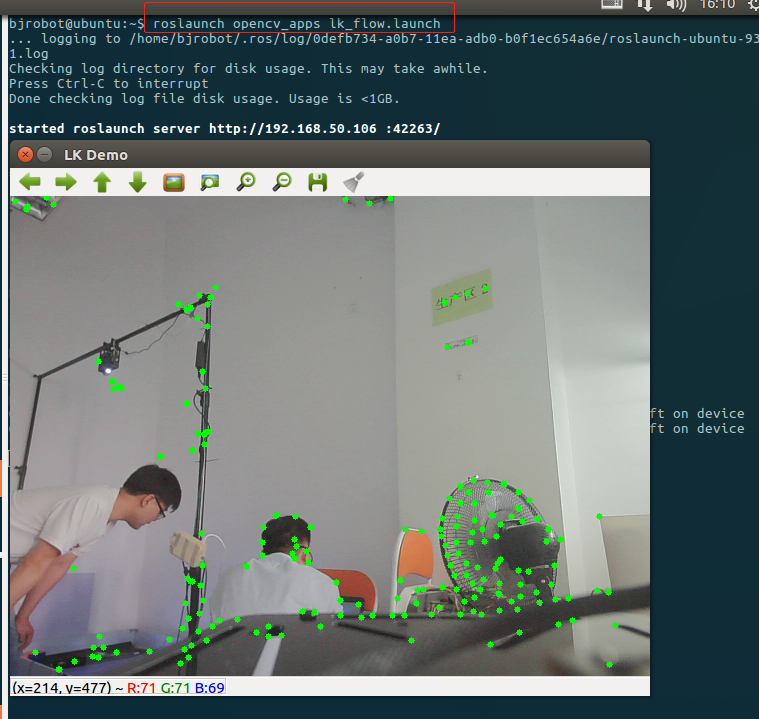
12.在虚拟机端启动 roslaunch opencv_apps lk_flow.launch 进行 lucas- kanade 法的optle 流检测
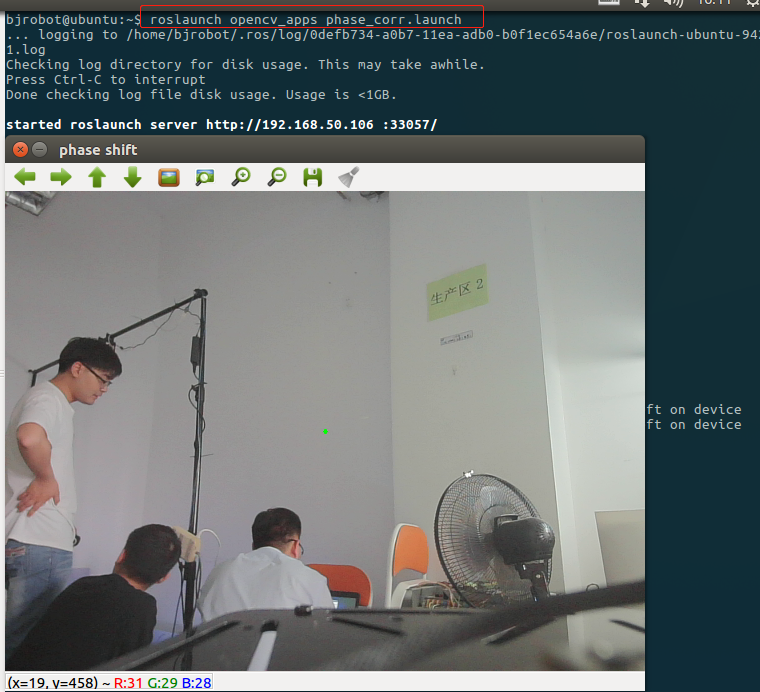
13.在虚拟机端启动 roslaunch opencv_apps phase_corr.launch 进行周波数相位模拟计算。
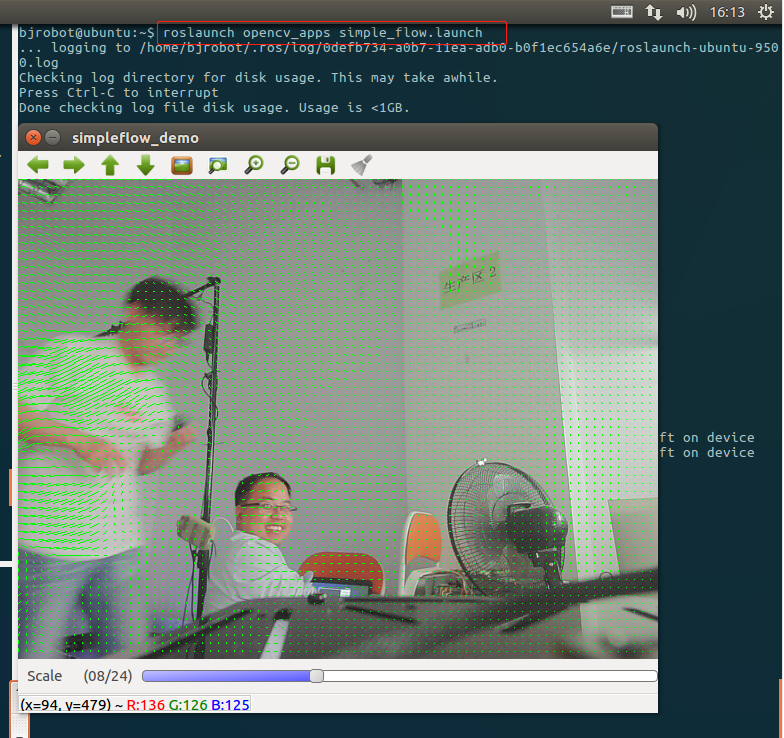
14.在虚拟机端启动 roslaunch opencv_apps simple_flow.launch进行simple_flow 的 opta 流检测
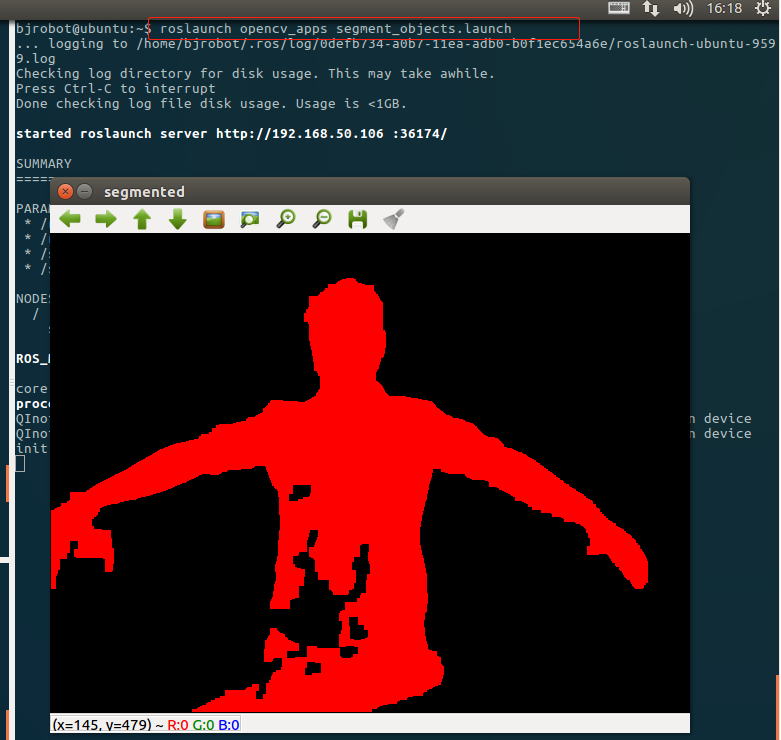
15.在虚拟机端启动 roslaunch opencv_apps segment_objects.launch 进行单一物体的区域分割
16.在虚拟机端启动 roslaunch opencv_apps rgb_color_filter.launch 进行图像过滤。

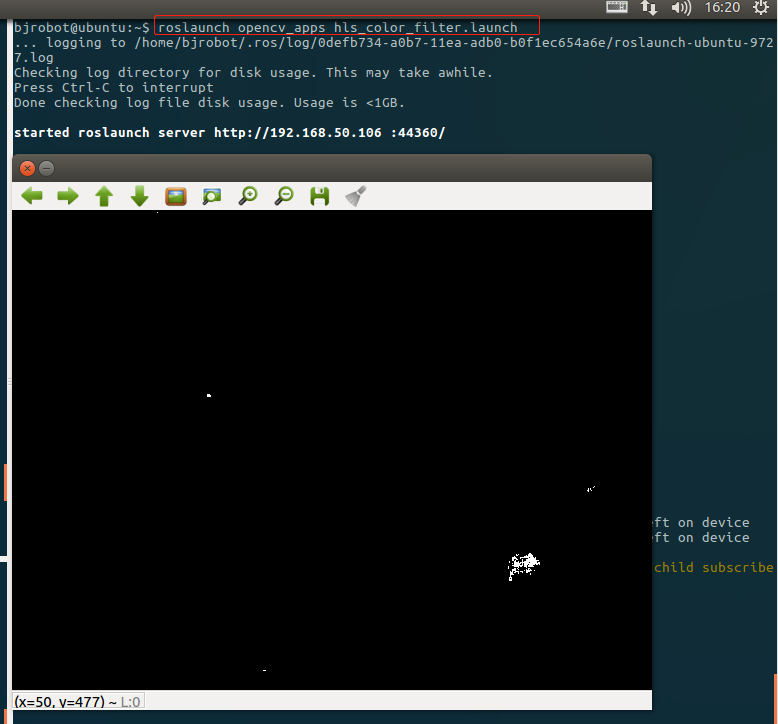
17.在虚拟机端启动 roslaunch opencv_apps hls_color_filter.launch 进行 hls 色特征采集
18.在虚拟机端启动 roslaunch opencv_apps hsv_color_filter.launch 进行 hsv 色特征采集
第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- 第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上. 2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁; 3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止. 4.此 ...
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
随机推荐
- 第8.33节 Python中__getattr__以及__getattr__与__ getattribute__的关系深入剖析
一. 引言 前面几节分别介绍了Python中属性操作捕获的三剑客:__ getattribute__方法.__setattr__方法.__delattr__方法,为什么__ getattribute_ ...
- 第10.8节 Python包的导入方式详解
一. 包导入与模块导入的关系 由于包本质上是模块,其实对模块的许多导入方法都适用于包,但由于包的结构与模块有差异,所以二者还是有些区别的: 对包的导入,实际上就是包目录下的__init__.py文件的 ...
- CQUT校园通知网消息爬虫+Server酱微信推送
上了大三之后发现很多学校的通知都不会发送到班群里面,导致自己会错过很多重要信息,故想写一个爬虫来获取从当前时间之后的新的通知标题,并推送到微信上. PS:推送到微信上这个想法来源是,很多时候都需要将消 ...
- 漫话docker的衰落与kubernetes的兴起
本文首发在OPPO互联网公众号,欢迎点击转载 https://mp.weixin.qq.com/s/wBC4CgAzXeTNURa1YdYmIQ. 伴随着kubernetes 1.20中对于docke ...
- 深入分析 Java 乐观锁
前言 激烈的锁竞争,会造成线程阻塞挂起,导致系统的上下文切换,增加系统的性能开销.那有没有不阻塞线程,且保证线程安全的机制呢?--乐观锁. 乐观锁是什么? 操作共享资源时,总是很乐观,认为自己可以成功 ...
- justify-content属性详解
justify-content 定义了flexbox flexbox内的元素在主轴的方向上的对齐方式. 它可以设置以下几种对齐方式: 靠近一方 justify-content:center: /*fl ...
- v-lazyload数据变化图片不切换
这个问题让我很困惑,明明得到的商品数据已经改变了,但是就图片不变化,随后找到了解决办法,那就是多加一个动态的key <img v-lazy="item.productImage&quo ...
- 容器编排系统之Kubectl工具的基础使用
前文我们了解了k8s的架构和基本的工作过程以及测试环境的k8s集群部署,回顾请参考https://www.cnblogs.com/qiuhom-1874/p/14126750.html:今天我们主要来 ...
- 【UIautomator2 安卓自动化】教程
一.环境准备: [安装] 安装uiautomator2 pip install --pre uiautomator2 pip install pillow [初始化] 部署相关的守护进程. 电脑连接上 ...
- JavaSE05-数组
1.概念 同一种类型数据的集合.其实数组就是一个容器. 2.优点 可以自动给数组中的元素从0开始编号,方便操作这些元素. 3.格式 1 元素类型[] 数组名 = new 元素类型[元素个数或数组长度] ...