pcl使用入门
最近在学习pcl,C++早就忘记了,所以踩了好些坑
不过终于通过了,特此记录下来
环境:win7+pcl1.81+vs2015
1.安装pcl1.81
下载PCL-1.8.1-AllInOne-msvc2015-win64.exe
链接:https://pan.baidu.com/s/1wikg-6uNeBdJf2Ra2EA2fA
提取码:j88f
安装一直下一步,在弹出OpenNI的安装程序
将OpenNI的安装路径设置为“PCL_ROOT”下3rdParty\OpenNI2文件夹,如C:\Program Files\PCL 1.8.1\3rdParty\OpenNI2
说明:
安装结束后若提示“路径过长无法添加环境变量”,需要手动加上环境变量
set PCL_ROOT=C:\Program Files\PCL 1.8.
set OPENNI2_INCLUDE64=C:\Program Files\PCL 1.8.\3rdParty\OpenNI2\Include
set OPENNI2_LIB64=C:\Program Files\PCL 1.8.\3rdParty\OpenNI2\Lib
set OPENNI2_REDIST64=C:\Program Files\PCL 1.8.\3rdParty\OpenNI2\Redist
set path=%path%;%PCL_ROOT%\bin\;C:\Program Files\PCL 1.8.\3rdParty\OpenNI2\Tools;C:\Program Files\PCL 1.8.\3rdParty\VTK\bin;
2.应用
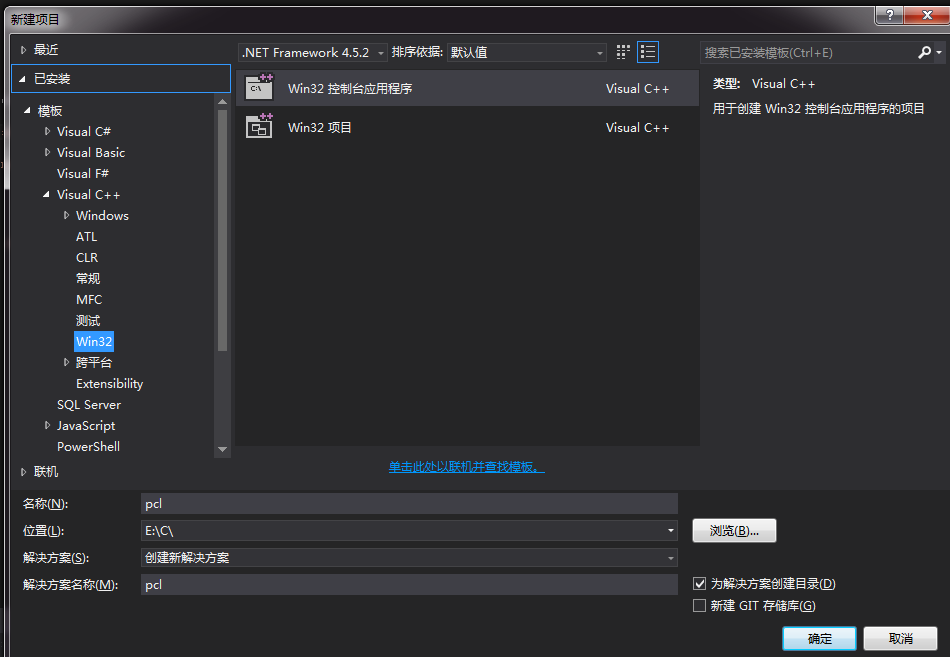
(1)创建工程pcl
文件—》新建—》项目
(2)配置,调试—》pcl属性

A.配置属性—》调试—》环境
path = C:\Program Files\PCL 1.8.1\bin

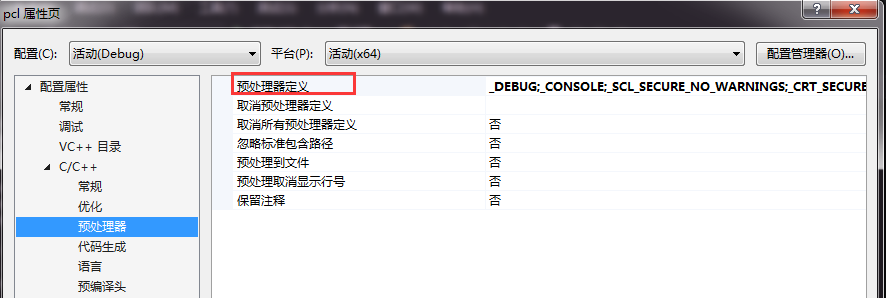
B.配置属性—》C/C++—》预处理器
追加
_SCL_SECURE_NO_WARNINGS
_CRT_SECURE_NO_WARNINGS
PCL_NO_PRECOMPILE
C.配置属性—》VC++目录—》包含目录
C:\Program Files\PCL 1.8.1\include\pcl-1.8
C:\Program Files\PCL 1.8.1\3rdParty\Boost\include\boost-1_64
C:\Program Files\PCL 1.8.1\3rdParty\Eigen\eigen3
C:\Program Files\PCL 1.8.1\3rdParty\FLANN\include
C:\Program Files\PCL 1.8.1\3rdParty\Qhull\include
C:\Program Files\PCL 1.8.1\3rdParty\VTK\include\vtk-8.0
C:\Program Files\PCL 1.8.1\3rdParty\OpenNI2\Include

D.配置属性—》VC++目录—》库目录
C:\Program Files\PCL 1.8.1\lib
C:\Program Files\PCL 1.8.1\3rdParty\Boost\lib
C:\Program Files\PCL 1.8.1\3rdParty\FLANN\lib
C:\Program Files\PCL 1.8.1\3rdParty\Qhull\lib
C:\Program Files\PCL 1.8.1\3rdParty\VTK\lib
C:\Program Files\PCL 1.8.1\3rdParty\OpenNI2\Lib

E.配置属性—》链接器—》附加依赖项
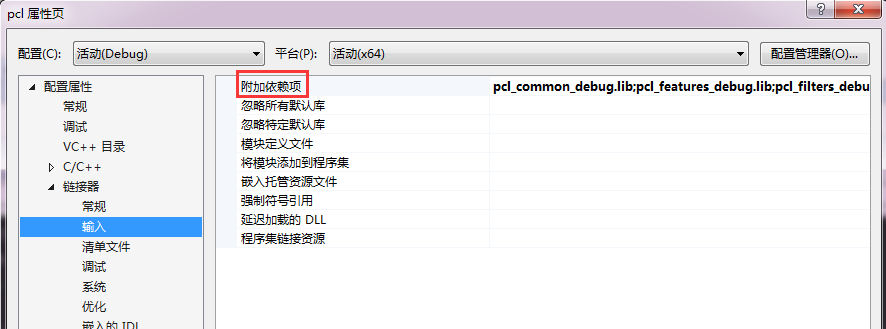
在Debug模式
pcl_common_debug.lib
pcl_features_debug.lib
pcl_filters_debug.lib
pcl_io_debug.lib
pcl_io_ply_debug.lib
pcl_kdtree_debug.lib
pcl_keypoints_debug.lib
pcl_ml_debug.lib
pcl_octree_debug.lib
pcl_outofcore_debug.lib
pcl_people_debug.lib
pcl_recognition_debug.lib
pcl_registration_debug.lib
pcl_sample_consensus_debug.lib
pcl_search_debug.lib
pcl_segmentation_debug.lib
pcl_stereo_debug.lib
pcl_surface_debug.lib
pcl_tracking_debug.lib
pcl_visualization_debug.lib
libboost_atomic-vc140-mt-gd-1_64.lib
libboost_chrono-vc140-mt-gd-1_64.lib
libboost_container-vc140-mt-gd-1_64.lib
libboost_context-vc140-mt-gd-1_64.lib
libboost_coroutine-vc140-mt-gd-1_64.lib
libboost_date_time-vc140-mt-gd-1_64.lib
libboost_exception-vc140-mt-gd-1_64.lib
libboost_filesystem-vc140-mt-gd-1_64.lib
libboost_graph-vc140-mt-gd-1_64.lib
libboost_iostreams-vc140-mt-gd-1_64.lib
libboost_locale-vc140-mt-gd-1_64.lib
libboost_log-vc140-mt-gd-1_64.lib
libboost_log_setup-vc140-mt-gd-1_64.lib
libboost_math_c99-vc140-mt-gd-1_64.lib
libboost_math_c99f-vc140-mt-gd-1_64.lib
libboost_math_c99l-vc140-mt-gd-1_64.lib
libboost_math_tr1-vc140-mt-gd-1_64.lib
libboost_math_tr1f-vc140-mt-gd-1_64.lib
libboost_math_tr1l-vc140-mt-gd-1_64.lib
libboost_mpi-vc140-mt-gd-1_64.lib
libboost_prg_exec_monitor-vc140-mt-gd-1_64.lib
libboost_program_options-vc140-mt-gd-1_64.lib
libboost_random-vc140-mt-gd-1_64.lib
libboost_regex-vc140-mt-gd-1_64.lib
libboost_serialization-vc140-mt-gd-1_64.lib
libboost_signals-vc140-mt-gd-1_64.lib
libboost_system-vc140-mt-gd-1_64.lib
libboost_test_exec_monitor-vc140-mt-gd-1_64.lib
libboost_thread-vc140-mt-gd-1_64.lib
libboost_timer-vc140-mt-gd-1_64.lib
libboost_unit_test_framework-vc140-mt-gd-1_64.lib
libboost_wave-vc140-mt-gd-1_64.lib
libboost_wserialization-vc140-mt-gd-1_64.lib
flann-gd.lib
flann_s-gd.lib
flann_cpp-gd.lib
flann_cpp_s-gd.lib
qhull_d.lib
qhull_p_d.lib
qhull_r_d.lib
qhullcpp_d.lib
qhullstatic_d.lib
qhullstatic_r_d.lib
vtkalglib-8.0-gd.lib
vtkChartsCore-8.0-gd.lib
vtkCommonColor-8.0-gd.lib
vtkCommonComputationalGeometry-8.0-gd.lib
vtkCommonCore-8.0-gd.lib
vtkCommonDataModel-8.0-gd.lib
vtkCommonExecutionModel-8.0-gd.lib
vtkCommonMath-8.0-gd.lib
vtkCommonMisc-8.0-gd.lib
vtkCommonSystem-8.0-gd.lib
vtkCommonTransforms-8.0-gd.lib
vtkDICOMParser-8.0-gd.lib
vtkDomainsChemistry-8.0-gd.lib
vtkexoIIc-8.0-gd.lib
vtkexpat-8.0-gd.lib
vtkFiltersAMR-8.0-gd.lib
vtkFiltersCore-8.0-gd.lib
vtkFiltersExtraction-8.0-gd.lib
vtkFiltersFlowPaths-8.0-gd.lib
vtkFiltersGeneral-8.0-gd.lib
vtkFiltersGeneric-8.0-gd.lib
vtkFiltersGeometry-8.0-gd.lib
vtkFiltersHybrid-8.0-gd.lib
vtkFiltersHyperTree-8.0-gd.lib
vtkFiltersImaging-8.0-gd.lib
vtkFiltersModeling-8.0-gd.lib
vtkFiltersParallel-8.0-gd.lib
vtkFiltersParallelImaging-8.0-gd.lib
vtkFiltersPoints-8.0-gd.lib
vtkFiltersProgrammable-8.0-gd.lib
vtkFiltersSelection-8.0-gd.lib
vtkFiltersSMP-8.0-gd.lib
vtkFiltersSources-8.0-gd.lib
vtkFiltersStatistics-8.0-gd.lib
vtkFiltersTexture-8.0-gd.lib
vtkFiltersTopology-8.0-gd.lib
vtkFiltersVerdict-8.0-gd.lib
vtkfreetype-8.0-gd.lib
vtkGeovisCore-8.0-gd.lib
vtkgl2ps-8.0-gd.lib
vtkhdf5-8.0-gd.lib
vtkhdf5_hl-8.0-gd.lib
vtkImagingColor-8.0-gd.lib
vtkImagingCore-8.0-gd.lib
vtkImagingFourier-8.0-gd.lib
vtkImagingGeneral-8.0-gd.lib
vtkImagingHybrid-8.0-gd.lib
vtkImagingMath-8.0-gd.lib
vtkImagingMorphological-8.0-gd.lib
vtkImagingSources-8.0-gd.lib
vtkImagingStatistics-8.0-gd.lib
vtkImagingStencil-8.0-gd.lib
vtkInfovisCore-8.0-gd.lib
vtkInfovisLayout-8.0-gd.lib
vtkInteractionImage-8.0-gd.lib
vtkInteractionStyle-8.0-gd.lib
vtkInteractionWidgets-8.0-gd.lib
vtkIOAMR-8.0-gd.lib
vtkIOCore-8.0-gd.lib
vtkIOEnSight-8.0-gd.lib
vtkIOExodus-8.0-gd.lib
vtkIOExport-8.0-gd.lib
vtkIOExportOpenGL-8.0-gd.lib
vtkIOGeometry-8.0-gd.lib
vtkIOImage-8.0-gd.lib
vtkIOImport-8.0-gd.lib
vtkIOInfovis-8.0-gd.lib
vtkIOLegacy-8.0-gd.lib
vtkIOLSDyna-8.0-gd.lib
vtkIOMINC-8.0-gd.lib
vtkIOMovie-8.0-gd.lib
vtkIONetCDF-8.0-gd.lib
vtkIOParallel-8.0-gd.lib
vtkIOParallelXML-8.0-gd.lib
vtkIOPLY-8.0-gd.lib
vtkIOSQL-8.0-gd.lib
vtkIOTecplotTable-8.0-gd.lib
vtkIOVideo-8.0-gd.lib
vtkIOXML-8.0-gd.lib
vtkIOXMLParser-8.0-gd.lib
vtkjpeg-8.0-gd.lib
vtkjsoncpp-8.0-gd.lib
vtklibharu-8.0-gd.lib
vtklibxml2-8.0-gd.lib
vtklz4-8.0-gd.lib
vtkmetaio-8.0-gd.lib
vtknetcdf_c++-gd.lib
vtkNetCDF-8.0-gd.lib
vtkoggtheora-8.0-gd.lib
vtkParallelCore-8.0-gd.lib
vtkpng-8.0-gd.lib
vtkproj4-8.0-gd.lib
vtkRenderingAnnotation-8.0-gd.lib
vtkRenderingContext2D-8.0-gd.lib
vtkRenderingContextOpenGL-8.0-gd.lib
vtkRenderingCore-8.0-gd.lib
vtkRenderingFreeType-8.0-gd.lib
vtkRenderingGL2PS-8.0-gd.lib
vtkRenderingImage-8.0-gd.lib
vtkRenderingLabel-8.0-gd.lib
vtkRenderingLIC-8.0-gd.lib
vtkRenderingLOD-8.0-gd.lib
vtkRenderingOpenGL-8.0-gd.lib
vtkRenderingVolume-8.0-gd.lib
vtkRenderingVolumeOpenGL-8.0-gd.lib
vtksqlite-8.0-gd.lib
vtksys-8.0-gd.lib
vtktiff-8.0-gd.lib
vtkverdict-8.0-gd.lib
vtkViewsContext2D-8.0-gd.lib
vtkViewsCore-8.0-gd.lib
vtkViewsInfovis-8.0-gd.lib
vtkzlib-8.0-gd.lib
OpenNI2.lib
View Content
在Release模式
pcl_common_release.lib
pcl_features_release.lib
pcl_filters_release.lib pcl_io_ply_release.lib
pcl_io_release.lib
pcl_kdtree_release.lib
pcl_keypoints_release.lib
pcl_ml_release.lib
pcl_octree_release.lib
pcl_outofcore_release.lib
pcl_people_release.lib
pcl_recognition_release.lib
pcl_registration_release.lib
pcl_sample_consensus_release.lib
pcl_search_release.lib
pcl_segmentation_release.lib
pcl_stereo_release.lib
pcl_surface_release.lib
pcl_tracking_release.lib
pcl_visualization_release.lib
libboost_atomic-vc140-mt-1_64.lib
libboost_chrono-vc140-mt-1_64.lib
libboost_container-vc140-mt-1_64.lib
libboost_context-vc140-mt-1_64.lib
libboost_coroutine-vc140-mt-1_64.lib
libboost_date_time-vc140-mt-1_64.lib
libboost_exception-vc140-mt-1_64.lib
libboost_filesystem-vc140-mt-1_64.lib
libboost_graph-vc140-mt-1_64.lib
libboost_iostreams-vc140-mt-1_64.lib
libboost_locale-vc140-mt-1_64.lib
libboost_log-vc140-mt-1_64.lib
libboost_log_setup-vc140-mt-1_64.lib
libboost_math_c99-vc140-mt-1_64.lib
libboost_math_c99f-vc140-mt-1_64.lib
libboost_math_c99l-vc140-mt-1_64.lib
libboost_math_tr1-vc140-mt-1_64.lib
libboost_math_tr1f-vc140-mt-1_64.lib
libboost_math_tr1l-vc140-mt-1_64.lib
libboost_mpi-vc140-mt-1_64.lib
libboost_prg_exec_monitor-vc140-mt-1_64.lib
libboost_program_options-vc140-mt-1_64.lib
libboost_random-vc140-mt-1_64.lib
libboost_regex-vc140-mt-1_64.lib
libboost_serialization-vc140-mt-1_64.lib
libboost_signals-vc140-mt-1_64.lib
libboost_system-vc140-mt-1_64.lib
libboost_test_exec_monitor-vc140-mt-1_64.lib
libboost_thread-vc140-mt-1_64.lib
libboost_timer-vc140-mt-1_64.lib
libboost_unit_test_framework-vc140-mt-1_64.lib
libboost_wave-vc140-mt-1_64.lib
libboost_wserialization-vc140-mt-1_64.lib
flann.lib
flann_cpp.lib
flann_cpp_s.lib
flann_s.lib
qhull.lib
qhull_p.lib
qhull_r.lib
qhullcpp.lib
qhullstatic.lib
qhullstatic_r.lib
vtkalglib-8.0.lib
vtkChartsCore-8.0.lib
vtkCommonColor-8.0.lib
vtkCommonComputationalGeometry-8.0.lib
vtkCommonCore-8.0.lib
vtkCommonDataModel-8.0.lib
vtkCommonExecutionModel-8.0.lib
vtkCommonMath-8.0.lib
vtkCommonMisc-8.0.lib
vtkCommonSystem-8.0.lib
vtkCommonTransforms-8.0.lib
vtkDICOMParser-8.0.lib
vtkDomainsChemistry-8.0.lib
vtkexoIIc-8.0.lib
vtkexpat-8.0.lib
vtkFiltersAMR-8.0.lib
vtkFiltersCore-8.0.lib
vtkFiltersExtraction-8.0.lib
vtkFiltersFlowPaths-8.0.lib
vtkFiltersGeneral-8.0.lib
vtkFiltersGeneric-8.0.lib
vtkFiltersGeometry-8.0.lib
vtkFiltersHybrid-8.0.lib
vtkFiltersHyperTree-8.0.lib
vtkFiltersImaging-8.0.lib
vtkFiltersModeling-8.0.lib
vtkFiltersParallel-8.0.lib
vtkFiltersParallelImaging-8.0.lib
vtkFiltersPoints-8.0.lib
vtkFiltersProgrammable-8.0.lib
vtkFiltersSelection-8.0.lib
vtkFiltersSMP-8.0.lib
vtkFiltersSources-8.0.lib
vtkFiltersStatistics-8.0.lib
vtkFiltersTexture-8.0.lib
vtkFiltersTopology-8.0.lib
vtkFiltersVerdict-8.0.lib
vtkfreetype-8.0.lib
vtkGeovisCore-8.0.lib
vtkgl2ps-8.0.lib
vtkhdf5-8.0.lib
vtkhdf5_hl-8.0.lib
vtkImagingColor-8.0.lib
vtkImagingCore-8.0.lib
vtkImagingFourier-8.0.lib
vtkImagingGeneral-8.0.lib
vtkImagingHybrid-8.0.lib
vtkImagingMath-8.0.lib
vtkImagingMorphological-8.0.lib
vtkImagingSources-8.0.lib
vtkImagingStatistics-8.0.lib
vtkImagingStencil-8.0.lib
vtkInfovisCore-8.0.lib
vtkInfovisLayout-8.0.lib
vtkInteractionImage-8.0.lib
vtkInteractionStyle-8.0.lib
vtkInteractionWidgets-8.0.lib
vtkIOAMR-8.0.lib
vtkIOCore-8.0.lib
vtkIOEnSight-8.0.lib
vtkIOExodus-8.0.lib
vtkIOExport-8.0.lib
vtkIOExportOpenGL-8.0.lib
vtkIOGeometry-8.0.lib
vtkIOImage-8.0.lib
vtkIOImport-8.0.lib
vtkIOInfovis-8.0.lib
vtkIOLegacy-8.0.lib
vtkIOLSDyna-8.0.lib
vtkIOMINC-8.0.lib
vtkIOMovie-8.0.lib
vtkIONetCDF-8.0.lib
vtkIOParallel-8.0.lib
vtkIOParallelXML-8.0.lib
vtkIOPLY-8.0.lib
vtkIOSQL-8.0.lib
vtkIOTecplotTable-8.0.lib
vtkIOVideo-8.0.lib
vtkIOXML-8.0.lib
vtkIOXMLParser-8.0.lib
vtkjpeg-8.0.lib
vtkjsoncpp-8.0.lib
vtklibharu-8.0.lib
vtklibxml2-8.0.lib
vtklz4-8.0.lib
vtkmetaio-8.0.lib
vtknetcdf_c++.lib
vtkNetCDF-8.0.lib
vtkoggtheora-8.0.lib
vtkParallelCore-8.0.lib
vtkpng-8.0.lib
vtkproj4-8.0.lib
vtkRenderingAnnotation-8.0.lib
vtkRenderingContext2D-8.0.lib
vtkRenderingContextOpenGL-8.0.lib
vtkRenderingCore-8.0.lib
vtkRenderingFreeType-8.0.lib
vtkRenderingGL2PS-8.0.lib
vtkRenderingImage-8.0.lib
vtkRenderingLabel-8.0.lib
vtkRenderingLIC-8.0.lib
vtkRenderingLOD-8.0.lib
vtkRenderingOpenGL-8.0.lib
vtkRenderingVolume-8.0.lib
vtkRenderingVolumeOpenGL-8.0.lib
vtksqlite-8.0.lib
vtksys-8.0.lib
vtktiff-8.0.lib
vtkverdict-8.0.lib
vtkViewsContext2D-8.0.lib
vtkViewsCore-8.0.lib
vtkViewsInfovis-8.0.lib
vtkzlib-8.0.lib
OpenNI2.lib
View Content
说明:
debug的比release的文件名多 -gd,_d是不同库中debug的命名规则
其中文件名来自 PCL 1.8.1\lib,PCL 1.8.1\3rdParty\Boost\lib,PCL 1.8.1\3rdParty\VTK\lib,PCL 1.8.1\3rdParty\FLANN\lib,PCL 1.8.1\3rdParty\OpenNI2\Lib,PCL 1.8.1\3rdParty\Qhull\lib
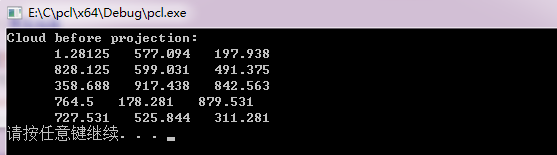
(3)测试
使用点云生成点,并输出
#include<iostream>
#include<pcl/io/pcd_io.h>
#include<pcl/point_types.h> int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); //Fill in the cloud data
cloud->width = ;
cloud->height = ;
cloud->points.resize(cloud->width*cloud->height);
for (size_t i = ; i < cloud->points.size(); ++i) {
cloud->points[i].x = * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = * rand() / (RAND_MAX + 1.0f);
}
std::cout << "Cloud before projection:" << std::endl;
for (size_t i = ; i < cloud->points.size(); ++i) {
std::cout << " " << cloud->points[i].x << " " << cloud->points[i].y << " " << cloud->points[i].z << " " << std::endl;
}
system("pause");
return ;
}
过滤器
#include<iostream>
#include<pcl/io/pcd_io.h>
#include<pcl/point_types.h>
#include<pcl/ModelCoefficients.h>
#include<pcl/filters/project_inliers.h>
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_projected(new pcl::PointCloud<pcl::PointXYZ>);
//Fill in the cloud data
cloud->width = ;
cloud->height = ;
cloud->points.resize(cloud->width*cloud->height);
for (size_t i = ; i < cloud->points.size(); ++i) {
cloud->points[i].x = * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = * rand() / (RAND_MAX + 1.0f);
}
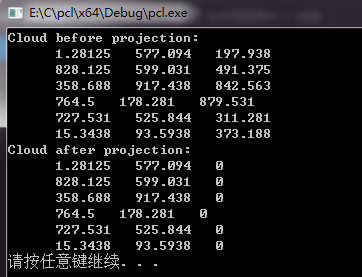
std::cerr << "Cloud before projection:" << std::endl;
for (size_t i = ; i < cloud->points.size(); ++i) {
std::cerr << " " << cloud->points[i].x << " " << cloud->points[i].y << " " << cloud->points[i].z << " " << std::endl;
}
// Create a set of planar coefficients with X=Y=0,Z=1
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients());
coefficients->values.resize();
coefficients->values[] = coefficients->values[] = ;
coefficients->values[] = 1.0;
coefficients->values[] = ;
// Create the filtering object
pcl::ProjectInliers<pcl::PointXYZ>proj;
proj.setModelType(pcl::SACMODEL_PLANE);
proj.setInputCloud(cloud);
proj.setModelCoefficients(coefficients);
proj.filter(*cloud_projected);
std::cerr << "Cloud after projection: " << std::endl;
for (size_t i = ; i < cloud_projected->points.size(); ++i) {
std::cerr << " " << cloud_projected->points[i].x << " " << cloud_projected->points[i].y << " " << cloud_projected->points[i].z << " " << std::endl;
}
system("pause");
return ;
}
优化将点展示出来
#include<iostream>
#include<pcl/point_cloud.h>
#include<pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
int main() {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
//设置点云大小
cloud->points.resize();
//填充点云数据
for (size_t i = ; i < cloud->points.size(); ++i)
{
cloud->points[i].x = * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = * rand() / (RAND_MAX + 1.0f);
}
//声明视窗
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
//设置背景色
viewer->setBackgroundColor(1.0f, 0.5f, 1.0f);
//预处理点云颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> magenta(cloud, , , );
//把点云加载到视窗
viewer->addPointCloud(cloud, magenta, "cloud");
//设置点云大小
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, , "cloud");
//显示
viewer->spin();
}

注:
如果出现以下错误
(1)LNK1112 模块计算机类型“x64”与目标计算机类型“X86”冲突解决方案
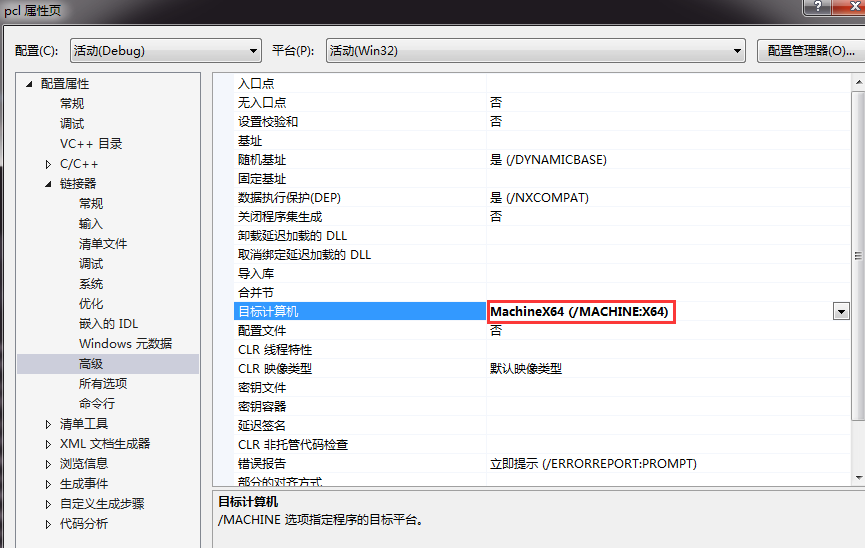
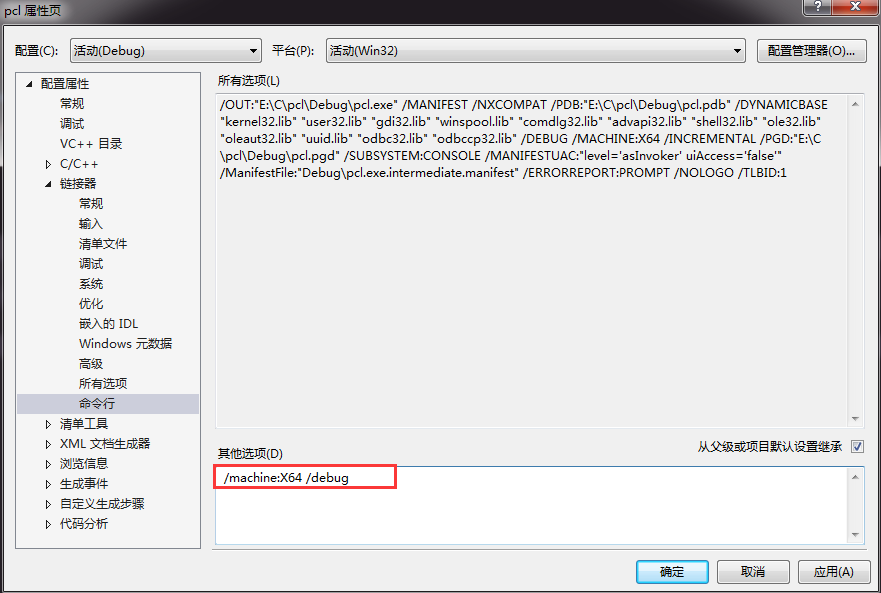
生成—配置管理器

补充:
需要重新配置,即2(2)部分的操作
(2)C1010 在查找预编译头时遇到意外的文件结尾

(3)C4996 'pcl::SAC_SAMPLE_SIZE': This map is deprecated and is kept only to prevent breaking existing user code.
打开项目属性页>C/C++>常规>SDL检查(设置为否)
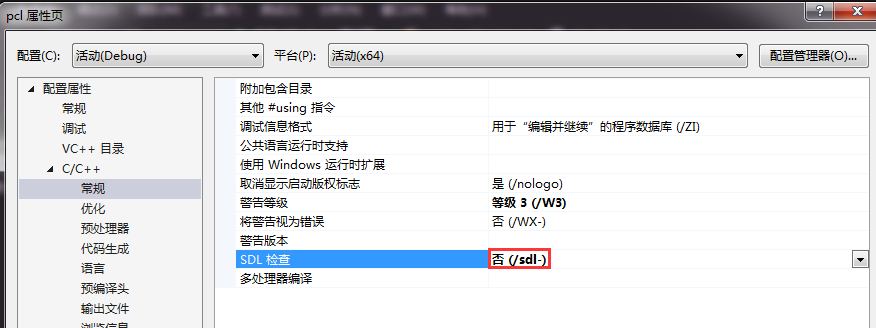
重新编译,原先的错误信息变成了警告。
通过pcl的学习,教训也是很大的:
不要偷懒,不要整个的复制代码,要认真读,认真看,不要跳跃,一定要沉下心来,沉下心来,要认真
pcl使用入门的更多相关文章
- PCL入门—点云操作 定义变量 显示点云 存储
// 定义相关变量 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr (new pcl::PointCloud<pcl::PointXYZ& ...
- CMake入门之创建一个基于PCL的最小工程
最近在学习PCL,借助Cmake可省去繁琐的添加包含目录和依赖库操作. 一个典型的CMakeLists.txt内容通常为: cmake_minimum_required(VERSION 2.6 FAT ...
- Xamarin.Forms入门学习路线
Xamarin 介绍 Xamarin是一套跨平台解决方案,目的是使用C#语言创造原生的iOS,Android,Mac和Windows应用. Xamarin的三个优势: Xamarin App拥有原生A ...
- ②springMVC入门
1 1.1 需求 以案例作为驱动. springmvc和mybaits使用一个案例(商品订单管理). 功能需求:商品列表查询 1.2 环境准备 数据库环境:mysql5.1
- opencv 2.4.9+pcl 1.6+vs2010+win7 32开发环境配置
最近在做图像方面的开发,需要对软件开发平台进行配置,我查找了关于这些方面的内容,由于软件版本很多,每个人的开发平台又不一样所以在对平台进行搭建过程中遇到了很多问题,下面我将我搭建平台的流程做一个记录. ...
- OpenCV入门学习笔记
OpenCV入门学习笔记 参照OpenCV中文论坛相关文档(http://www.opencv.org.cn/) 一.简介 OpenCV(Open Source Computer Vision),开源 ...
- 跟我一起学PCL打印语言(一)
引言 本人从事打印机开发和打印驱动开发的相关工作,深感资料特别是中文资料的匮乏和不成系统,对新入门的从事该行业的人来说,门槛很高.在这里一方面是将开发中遇到的相关知识点整理出来,另一方面也能够促进自己 ...
- C#使用Xamarin开发可移植移动应用(1.入门与Xamarin.Forms页面),附源码
前言 什么是Xamarin? Xamarin始创于2011年,旨在使移动开发变得难以置信地迅捷和简单. Xamarin的产品简化了针对多种平台的应用开发,包括iOS.Android.Windows P ...
- (一)ROS系统入门 Getting Started with ROS 以Kinetic为主更新 附课件PPT
ROS机器人程序设计(原书第2版)补充资料 教案1 ROS Kinetic系统入门 ROS Kinetic在Ubuntu 16.04.01 安装可参考:http://blog.csdn.net/zha ...
随机推荐
- ARTS-week2
Algorithm 给你一个有效的 IPv4 地址 address,返回这个 IP 地址的无效化版本.所谓无效化 IP 地址,其实就是用 "[.]" 代替了每个 ".&q ...
- django-获取购物车商品数量-redis
视图函数views.py中 from django_redis import get_redis_connection # 连接redis class IndexView(View): '''首页'' ...
- *arg和**kwarg作用
*args:可以理解为只有一列的表格,长度不固定. **kwargs:可以理解为字典,长度也不固定. 1.函数调用里的*arg和**kwarg: (1) *arg:元组或列表 ...
- 深入解析pure virtual function call
在本文中,我们将不解释为什么会提示“纯虚拟函数调用”和如何提示“纯虚拟函数调用”,而是详细解释在win32平台的构造函数/析构函数中直接/间接调用纯虚拟函数时程序本身.在开始时,将显示一个经典示例,在 ...
- 微信小程序 movable-view组件应用:可拖动悬浮框_返回首页
1. movable-view组件具体内容可参考官网:微信官方文档 2. demo参考:https://github.com/ChinaFanny/YFWeappMovableView 运行效果 核心 ...
- ldap和phpldapadmin的安装部署
LDAP 安装 一.安装LDAP 1. 安装包 yum install openssl-devel gcc libtool-ltdl-devel -y yum install openldap-ser ...
- Spark2.x(六十):在Structured Streaming流处理中是如何查找kafka的DataSourceProvider?
本章节根据源代码分析Spark Structured Streaming(Spark2.4)在进行DataSourceProvider查找的流程,首先,我们看下读取流数据源kafka的代码: Spar ...
- Netty 多客户端连接与通信
实现场景: 聊天 服务端,客户端A,客户端B,客户端C.当客户端发送消息给服务端后,服务端在将这条消息广播个所有客户端户端A,客户端B,客户端C. 需求1: 客户端上线后,会通知所有客户端上线. 如客 ...
- Research Guide for Neural Architecture Search
Research Guide for Neural Architecture Search 2019-09-19 09:29:04 This blog is from: https://heartbe ...
- plsql 使用desc命令提示invalid sql statement
使用SQL WINDOW运行desc命令就报invalid sql statement错误!! 使用Command Window就可以!!!