SAMP论文学习



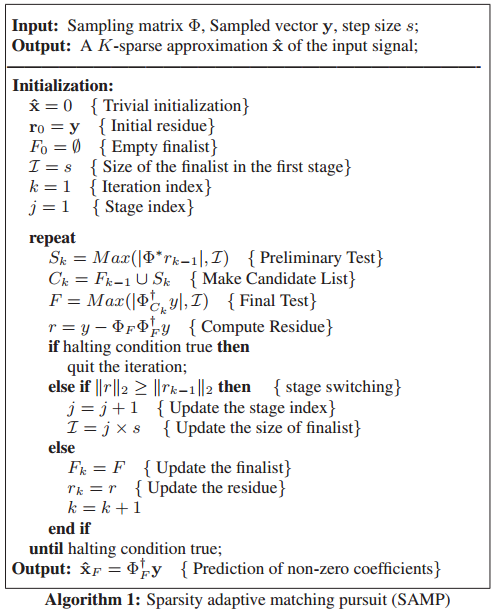



function [xr, iter_num] =SAMP(y, Phi, step_size, sigma)
% SAMP: Sparsity Adaptive Matching Pursuit algoritm for compressed sensing.
% For theoretical analysis, please refer to the paper :
% Thong. T. Do, Lu Gan and Trac D. Tran ,"Sparsity Adaptive Matching
% Purusit for practical compressed sensing" available at http://dsp.ece.rice.edu/cs
% Written by Thong Do(thongdo@jhu.edu)
% Updated on July, 26th 2008
% parameter usage:
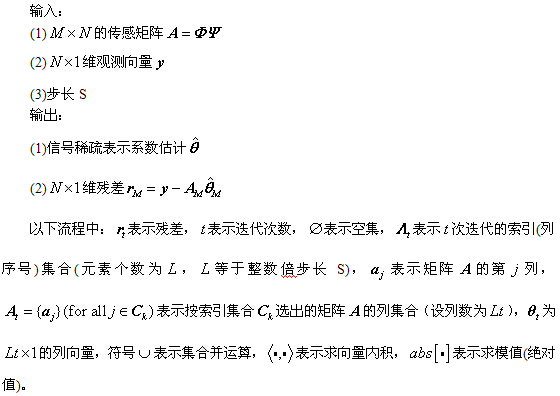
% y: Mx1 observation vector
% Phi: MxN measurement matrix
% step_size: any positive integer value not larger than sparsity
% sigma: noise energy when sensing
% xr: reconstructed sparse signal
% iter_num: number of iterations
% Initialization
iter_num = 0;
actset_size = step_size;
active_set = [];
res = y;
stg_idx = 1; % stage index
while (norm(res)>sigma)
% candidate list
[val, idx] = sort(abs(Phi'*res), 'descend');
candidate_set = union(active_set, idx(1:actset_size));
% finalist
[val, idx] = sort(abs(pinv(Phi(:,candidate_set))*y), 'descend');
new_active_set = candidate_set(idx(1:actset_size));
new_res = y-Phi(:,new_active_set)*pinv(Phi(:,new_active_set))*y;
if (norm(new_res) >= norm(res))
% shift into a new stage
stg_idx = stg_idx + 1;
actset_size = stg_idx*step_size; else
% update residual and active set
res = new_res;
active_set= new_active_set; end iter_num = iter_num +1; %while的次数
end % loop
% reconstruction
N = size(Phi,2);
xr = zeros(N,1);
xr_active_set = pinv(Phi(:,active_set))*y;
xr(active_set) = xr_active_set;
SAMP论文学习的更多相关文章
- Faster RCNN论文学习
Faster R-CNN在Fast R-CNN的基础上的改进就是不再使用选择性搜索方法来提取框,效率慢,而是使用RPN网络来取代选择性搜索方法,不仅提高了速度,精确度也更高了 Faster R-CNN ...
- 《Explaining and harnessing adversarial examples》 论文学习报告
<Explaining and harnessing adversarial examples> 论文学习报告 组员:裴建新 赖妍菱 周子玉 2020-03-27 1 背景 Sz ...
- 论文学习笔记 - 高光谱 和 LiDAR 融合分类合集
A³CLNN: Spatial, Spectral and Multiscale Attention ConvLSTM Neural Network for Multisource Remote Se ...
- Apache Calcite 论文学习笔记
特别声明:本文来源于掘金,"预留"发表的[Apache Calcite 论文学习笔记](https://juejin.im/post/5d2ed6a96fb9a07eea32a6f ...
- GoogleNet:inceptionV3论文学习
Rethinking the Inception Architecture for Computer Vision 论文地址:https://arxiv.org/abs/1512.00567 Abst ...
- IEEE Trans 2008 Gradient Pursuits论文学习
之前所学习的论文中求解稀疏解的时候一般采用的都是最小二乘方法进行计算,为了降低计算复杂度和减少内存,这篇论文梯度追踪,属于贪婪算法中一种.主要为三种:梯度(gradient).共轭梯度(conjuga ...
- Raft论文学习笔记
先附上论文链接 https://pdos.csail.mit.edu/6.824/papers/raft-extended.pdf 最近在自学MIT的6.824分布式课程,找到两个比较好的githu ...
- 论文学习-系统评估卷积神经网络各项超参数设计的影响-Systematic evaluation of CNN advances on the ImageNet
博客:blog.shinelee.me | 博客园 | CSDN 写在前面 论文状态:Published in CVIU Volume 161 Issue C, August 2017 论文地址:ht ...
- 论文学习笔记--无缺陷样本产品表面缺陷检测 A Surface Defect Detection Method Based on Positive Samples
文章下载地址:A Surface Defect Detection Method Based on Positive Samples 第一部分 论文中文翻译 摘要:基于机器视觉的表面缺陷检测和分类可 ...
随机推荐
- Java中网络编程
以下内容引用自http://wiki.jikexueyuan.com/project/java/networking.html: 术语网络编程指编写跨多种设备(电脑)执行的,设备使用一个网络互相连接的 ...
- 转:String数组初始化
近日,笔者在java编程中因为疏忽对String数组的初始化定义错误,导致程序运行出错.现将所理解的String数组在此进行说明,并对String数组初始化进行分析. //一维数组String[] s ...
- 外排序 & 败者树 & 多路归并-学习
来来来,根据这篇文章,学一下败者树吧: http://blog.csdn.net/whz_zb/article/details/7425152 一.胜者树 胜者树的一个优点是,如果一个选手的值改变了, ...
- Java知识图谱
1.Java学习路径1 我想很多人看到这个路径可能会问我在哪里可以学习,所以就先附上这条路径的学习地址吧,这也是这张图片的来源,愿意学习的可以去看看:Java研发工程师学习路径 2.Java学习路径2 ...
- 【知识梳理1】Android触摸事件机制
前言 随着科学技术的发展,智能手机早已成为我们当代人身边不可缺少的"伙伴"之中的一个,堪比对象女友.每天我们对着手机反复的做着点击.滑动操作,而手机则随着我们的操作给我们展示她的精 ...
- 嵌入式开发之davinci--- DVRRDK, EZSDK和DVSDK这三者有什么区别
下载的时候选择信息要避免security类型的产品,这个是要审查的. DVRRDK是专门针对DVR的开发包是非公开的,针对安防的客户定制的,效率要高. EZSDK是开放的版本架构上使用openmax可 ...
- p_CreateAuditEntry
如果你能搜到我这篇博客,相信你导遇到的了和我一样在导入CRM组织时遇到了类似的错误.这个错误我查资料可以通过CRM升级来解决参考下面连接: https://support.microsoft.com/ ...
- Facebook Flux 分析
首先是actions使用了Dispatcher来定义分发事件, Store在Dispatcher里注册自己的ActionType,收到对应的Action后修改Store内部的结构 Store emit ...
- UWP开发入门系列笔记之(零):UWP的前世今生
引言 在本篇文章中,可以掌握以下知识: 设备族群,如何决定目标设备 新的UI控件和新面板帮助你适应不同的设备特征 从Windows 8系统开始,微软就 引入了WindowsRT(Windows Run ...
- jQuery简单纯文字提示条
如何制作jQuery简单纯文字提示条,先介绍提示条(tooltip)的意思是用户鼠标悬停经过事件发生提示title.它们已经呈现在大多数浏览器中,当你可以提供一个链接或图片的title属性,就是用户将 ...