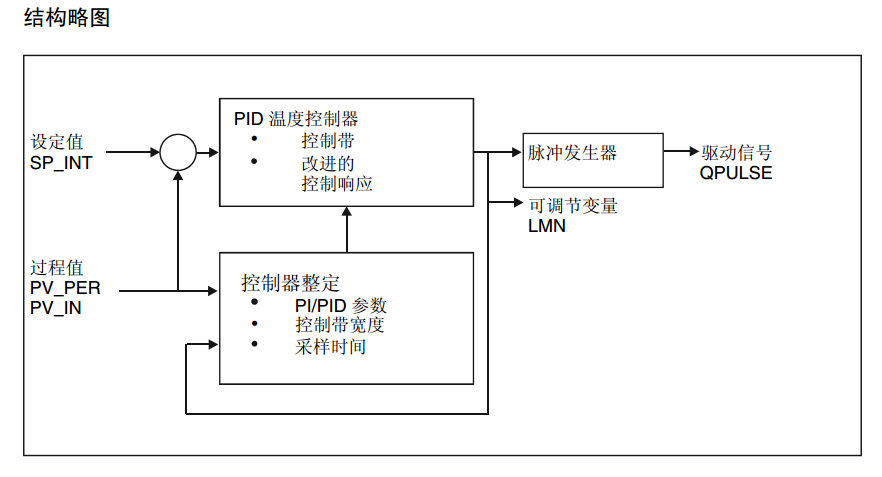
SIMATIC PID温度控制
SIMATIC PID温度控制
// VAR_INPUT ------------------------------------------------------------------- #ifndef TRUE
#define TRUE 0x01
#endif #ifndef FALSE
#define FALSE 0x00
#endif // 过程变量输入, 可以在“过程变量输入”输入端设置初始值,
// 或者也可以连接到浮点数格式的外部过程变量上。
float PV_IN = 0.0; // 外围设备过程变量 外围设备I/O 格式的过程变量连接到控制器的“外围设备过程变量”输入端。
int PV_PER = ; // 干扰变量 对于前馈控制,干扰变量连接到“干扰变量”输入端。
float DISV = 0.0; // 积分作用保持在正方向
// 积分作用的输出可以锁定在正方向。
// 为此,INT_HPOS 输入端必须设置成TRUE。
// 在级联控制中,主控制器的INT_HPOS 互连到次级控制器的QLMN_HLM。
unsigned char INT_HPOS = FALSE; // 积分作用保持在负方向
// 积分作用的输出可以锁定在负方向。
// 为此,INT_HNEG 输入端必须设置成TRUE。
// 在级联控制中,主控制器的INT_HNEG 互连到次级控制器的QLMN_LLM。
unsigned char INT_HNEG = FALSE; // 调用PID 和脉冲发生器的选项
int SELECT = ; // 如果激活了脉冲发生器,则有几种方法可用于调用PID 算法和脉冲发生// 器:
// SELECT =0:在一个快速周期性中断级中调用控制器,并处理PID算法和脉冲发生器。
// SELECT =1:在OB1 中调用控制器,并且只处理PID 算法。
// SELECT =2:在一个快速周期性中断级中调用控制器,并只处理脉冲发生器。
// SELECT =3:在一个慢速周期性中断级中调用控制器,并只处理PID 算法。 // END_VAR --------------------------------------------------------------------- // VAR_OUTPUT ------------------------------------------------------------------ // 过程变量 有效的过程变量在“过程变量”输出端输出。
float PV = 0.0; // 可调节变量 可调节变量的有效值以浮点数格式, 在“可调节变量”输出端输出。
float LMN = 0.0; // 外围设备操作可调节变量 外围设备格式的可调节变量值连接到控制器
// 的“外围设备操作可调节变量”输出端。
int LMN_PER = ; // 输出脉冲信号 可调节变量的值是在QPULSE 输出端调制的输出脉冲宽度。
unsigned char QPULSE = FALSE; // 达到可调节变量的上限 可调节变量的值始终限制在上限和下限范围之内。
// 当超过了上限时,通过QLMN_HLM 输出端进行指示。
unsigned char QLMN_HLM = FALSE; // 达到可调节变量的下限 可调节变量的值始终限制在上限和下限范围之内。
// 当超过了下限时,通过QLMN_LLM 输出端进行指示。
unsigned char QLMN_LLM = FALSE; // 下一个循环周期,连续控制器继续工作
// 该参数指示在下一个块调用时是否执行连续控制器环节(只有当SELECT 具有数值0 或1 时才相关)。
unsigned char QC_ACT = TRUE; // END_VAR --------------------------------------------------------------------- // VAR_IN_OUT ------------------------------------------------------------------ // 连续控制器的采样时间[秒]
// 在此设置PID 算法的采样时间。调谐器在阶段1 中计算采样时间,然后将其输入到CYCLE 中。
float CYCLE = 0.1; // 脉冲发生器的采样时间[秒]
// 在该输入端,输入脉冲发生器环节的采样时间。
// FB 58“TCONT_CP”在阶段1 中计算采样时间,然后将其输入到CYCLE_P。
float CYCLE_P = 0.02; // 内部设定值 “内部设定值”输入端用于指定一个设定值。
float SP_INT = 0.0; // 手动值 “手动值”输入端用于指定一个手动值。在自动模式中,它被改成可调节变量。
float MAN = 0.0; // 完全重启动 该块有一个初始化例行程序,当COM_RST 输入端被置位时执行该例行程序。
unsigned char COM_RST = FALSE; // 手动操作打开 如果“手动操作打开”输入被置位,则中断控制回路。
// MAN 手动值被设置为可调节变量的值。
unsigned char MAN_ON = TRUE; // END_VAR --------------------------------------------------------------------- // VAR ------------------------------------------------------------------------- // 死区宽度 偏差通过死区。“死区宽度”输入决定死区大小。
float DEADB_W = 0.0; // 积分作用的初始化值
// 积分作用的输出可以在I_ITL_ON 输入端上设置。该初始化值用于“积分作用的初始化值”输入。
// 在重启动期间,COM_RST = TRUE,积分作用被设置成初始值。
float I_ITLVAL = 0.0; // 可调节变量的值始终限制在上限和下限范围之内。“可调节变量上限”输入指定了上限。
float LMN_HLM = 100.0; // 可调节变量上限 // 可调节变量的值始终限制在上限和下限范围之内。“可调节变量下限”输入指定了下限。
float LMN_LLM = 0.0; // 可调节变量下限 // “过程变量因子”输入和“外围设备过程值”相乘。该输入用于调整过程变量的范围。
float PV_FAC = 1.0; // 过程变量因子 // “过程变量偏移量”输入被加到“外围设备过程变量”上。该输入用于调整过程变量的范围。
float PV_OFFS = 0.0; // 过程变量偏移量 // “可调节变量因子”输入和可调节变量相乘。该输入用于调整可调节变量的范围。
float LMN_FAC = 1.0; // 可调节变量因子 // “可调节变量偏移量”输入加到可调节变量的数值上。该输入用于调整可调节变量的范围。
float LMN_OFFS = 0.0; // 可调节变量偏移量 // 脉宽调制的脉冲重复周期在PER_TM 参数上输入。
// 脉冲发生器的脉冲重复周期和采样时间之间的关系决定脉宽调制的精度。
float PER_TM = 1.0; // 周期[秒] // 最小脉冲或最小断开时间可以在“最小脉冲/断开时间”参数上设置。
// P_B_TM 在内部被限制为大于CYCLE_P。
float P_B_TM = 0.0; // 最小脉冲/断开时间[秒] // 用于控制器整定的过程激励来自于TUN_DLMN 上的设定值阶跃变化。
float TUN_DLMN = 20.0; // 用于过程激励的可调节变量增量 // 外围设备模式可以在这个开关上输入I/O 模块的类型。
// 输入PV_PER 上的过程变量在PV 输出上被规格化成°C。
// PER_MODE =0:标准
// PER_MODE =1:气候
// PER_MODE =2:电流/电压
int PER_MODE = ; // 如果想从I/O 中读取过程变量,则PV_PER 输入必须连接到I/O,
// 并且“外围设备过程变量”输入必须置位。
unsigned char PVPER_ON = FALSE; // 外围设备过程变量打开 // 积分作用的输出可以设置为I_ITLVAL 输入。“设置积分作用”输入必须置位。
unsigned char I_ITL_ON = FALSE; // 积分作用的初始化打开 // 如果设置了PULSE_ON = TRUE,则脉冲发生器被激活。
unsigned char PULSE_ON = FALSE; // 脉冲发生器打开 // 只有当TUN_KEEP 变成FALSE时,工作模式才切换成自动。
unsigned char TUN_KEEP = FALSE; // 保持整定打开 float ER = 0.0; // 偏差信号 有效的偏差在“偏差信号”输出端输出。
float LMN_P = 0.0; // 比例分量 “比例分量”包含了可调节变量的比例作用。
float LMN_I = 0.0; // 积分分量 “积分分量”包含了可调节变量的积分作用。
float LMN_D = 0.0; // 微分分量 “微分分量”包含了可调节变量的微分作用。 int PHASE = ; // 自整定的阶段 控制器整定的当前阶段在PHASE 输出端指示(0..7)。
int STATUS_H = ; // 自整定的状态加热 在加热时,STATUS_H 指示搜索拐点的诊断值。
int STATUS_D = ; // 自整定的状态控制器设计 当加热时,STATUS_D 指示控制器设计的诊断值。 // 已经应用了整定可调节变量,整定已经开始,并仍然处于第2 阶段(定位拐点)。
unsigned char QTUN_RUN = FALSE; // 整定已激活(PHASE 2) struct
{
// PI 控制器参数
float GAIN; // = 0.0 ; // PI 比例增益
float TI; // = 0.0 ; // PI 复位时间[s]
} PI_CON; struct
{
// PID 控制器参数
float GAIN; // = 0.0 ; // PID 比例增益
float TI; // = 0.0 ; // PID 复位时间[s]
float TD; // = 0.0 ; // PID 微分时间[s]
} PID_CON; struct
{
// 保存的控制器参数 PID 参数保存在此结构中。
float PFAC_SP; // = 1.0 ; // 用于设定值变化的比例因子[0..1]
float GAIN; // = 0.0 ; // 比例增益
float TI; // = 0.0 ; // 复位时间[s]
float TD; // = 0.0 ; // 微分时间[s]
float D_F; // = 5.0 ; // 微分因子TD/TM_LAG (5..10)
float CON_ZONE; // = 100.0 ; // 控制带打开
unsigned char CONZ_ON; // = FALSE ; // 控制带
} PAR_SAVE; // 当有设定值变化时,PFAC_SP 指定有效的比例P 作用。它的设置范围是0 到1。
// 1:如果设定值发生变化,则比例P 作用具有全部效果。
// 0:如果设定值发生变化,比例P 作用没有任何效果。
float PFAC_SP = 1.0; // 用于设定值变化的比例因子 // “比例增益”输入用于指定控制器增益。可以通过给GAIN 一个负号来反转控制方向。
float GAIN = 2.0; // 比例增益 // “复位时间”输入(积分时间)决定了积分作用响应。
float TI = 40.0; // 复位时间[秒] // “微分时间”输入决定了微分作用响应。
float TD = 10.0; // 微分时间[秒] // 微分因子描述了D 作用的滞后。D_F = 微分时间/“D 作用的滞后”
float D_F = 5.0; // 微分因子 // 如果偏差大于控制带宽度,将输出可调节变量上限作为实际的可调节变量。
// 如果偏差小于控制带宽度,将输出可调节变量下限作为实际的可调节变量。
float CON_ZONE = 100.0; // 控制带 // 控制带打开 CONZ_ON =TRUE 激活控制带。
unsigned char CONZ_ON = FALSE; // 如果设置了TUN_ON=TRUE,则可调节变量被取平均,直到设定值发生阶跃变化或TUN_ST=TRUE
// 将可调节变量激励TUN_DLMN 激活。
unsigned char TUN_ON = FALSE; // 自整定打开 // 如果要使设定值在控制器整定期间在工作点上保持不变,
// 则通过TUN_ST=1 来激活可调节变量发生大小为TUN_DLMN 的阶跃变化。
unsigned char TUN_ST = FALSE; // 开始自整定 // 从数据结构PAR_SAVE 中装载控制器参数
// PFAC_SP、GAIN、TI、 TD、D_F CONZ_ON 和CON_ZONE (只在手动模式中)。
unsigned char UNDO_PAR = FALSE; // 撤消对控制器参数的更改 // 将控制器参数PFAC_SP、GAIN、TI、TD、D_F CONZ_ON 和CON_ZONE
// 保存到数据结构PAR_SAVE 中。
unsigned char SAVE_PAR = FALSE; // 保存当前控制器参数 // 根据PID_ON,从数据结构PI_CON 或PID_CON 中装载控制器参数GAIN、TI、TD (仅在手动模式中)
unsigned char LOAD_PID = FALSE; // 装载优化的PI/PID 参数 // 在PID_ON 输入上,可以指定整定过的控制器是否作为PI 控制器或PID 控制器运行。
// PID 控制器:PID_ON = TRUE
// PI 控制器:PID_ON = FALSE对于某些过程类型来说,
// 尽管PID_ON = TRUE,但仍然可以只设计PI 控制器。
unsigned char PID_ON = TRUE; // PID 模式打开 // 识别出的过程增益。对于过程类型I来说,GAIN_P 趋向于被估计得低一些。
float GAIN_P = 0.0; // 过程比例增益 float TU = 0.0; // 延迟时间[秒] 识别出的过程延迟。 // 识别出的过程的系统时间常数。对于过程类型I 来说,TA 趋向于被估计得低一些。
float TA = 0.0; // 恢复时间[秒] // PV WITH 100 % LMN 变化的最大斜率GAIN_P = 0.01 * KIG * TA
float KIG = 0.0; // 处理顺序 该参数指定处理的执行顺序。也可以指定“非整数值”。
float N_PTN = 0.0; // PTN 模型的时间延迟[秒] PTN 模型的时间延迟(有效值只用于N_PTN >= 2)。
float TM_LAG_P = 0.0; // 到拐点的时间[秒] 从过程激发到拐点所经历的时间。
float T_P_INF = 0.0; // 拐点处的PV - PV0 从过程激发到拐点处,过程变量发生的变化。
float P_INF = 0.0; // 整定开始时的可调节变量 在阶段1 中检测(平均值)。
float LMN0 = 0.0; // 整定开始时的过程值
float PV0 = 0.0; // 整定开始时PV 的变化率[1/s] 采用有符号数。
float PVDT0 = 0.0; // PV 的当前变化率[1/s] 采用有符号数。
float PVDT = 0.0; // 拐点处过程变量的最大变化率(采用有符号数,始终大于0),用于计算TU 和KIG。
float PVDT_MAX = 0.0; // 每秒钟PV 的最大变化率[1/s] // PVDT_MAX 中的噪声比率,采用%形式 噪声的比例越高,控制参数的精度就越低(越不积极)。
float NOI_PVDT = 0.0; // PV 中的绝对噪声 阶段1 中最大和最小过程变量的差值。
float NOISE_PV = 0.0; // 均值过滤器的周期数 过程变量取FIL_CYC 个周期的平均值。
// 如果需要,FIL_CYC 可以自动从1 增加到最大值1024。
int FIL_CYC = ; // 该时间用于在测量噪声存在的情况下,找到更进一步的(或者说,更好的)拐点。
// 只有在此时间过后,整定才结束。
int POI_CMAX = ; // 拐点后的最大周期数 int POI_CYCL = ; // 拐点后的周期数
int sctFil = ;
float srPv = 0.0;
float srNoise = 0.0;
float srPvdt2 = 0.0;
float srPvdtMax2 = 0.0;
float srNoise2 = 0.0;
float srPvOld2 = 0.0;
int siStatus = ;
int siSpDir = ;
float srTime = 0.0;
float sPvOld = 0.0;
float sSpOld = 0.0;
float srPvMin = 0.0;
float srPVsim = 0.0;
float srEffDlmn = 0.0;
float sInvAlt = 0.0; // 上周期比例偏差值
float sIanteilAlt = 0.0; // 上周期积分值
float sRestInt = 0.0; // 上周期积分偏差量(浮点数计算偏差)
float sRestDif = 0.0; // 上周期微分偏差量(浮点数计算偏差)
float sRueck = 0.0;
float sLmn = 0.0; // 上周期调节值
float spassPTm = 0.0;
float sCycTmPass = 0.0;
float sPTm = 0.0;
float srOptLmn = 0.0;
unsigned char sbOptLmn = FALSE;
unsigned char sbConzOn = FALSE;
unsigned char sbSpChange = FALSE; // 设定值是否变化
unsigned char sbReOpt = FALSE;
float sLmnHlmOld = 100.0;
float sLmnLlmOld = 0.0;
float srDiffSp = 0.0;
long int siTime = ;
long int siCycle = ;
long int siCycleP = ;
int siPulsFil = ;
float srPulsPv = 0.0;
float srDPvdt = 0.0;
float srDPvdt2 = 0.0;
float sNpInf = 0.0;
float sCycleM = 0.0;
float sGf11_30 = 0.0;
float sGf12_30 = 0.0;
float sGf21_30 = 0.0;
float sGf22_30 = 0.0;
float sPv0Sim_30 = 0.0;
float srPVsim3_30 = 0.0;
float srPVsim2_30 = 0.0;
float srPVsim1_30 = 0.0;
float srDelPvsim_30 = 0.0;
float sGf11_20 = 0.0;
float sGf12_20 = 0.0;
float sGf21_20 = 0.0;
float sGf22_20 = 0.0;
float sPv0Sim_20 = 0.0;
float srPVsim2_20 = 0.0;
float srPVsim1_20 = 0.0;
float srDelPvsim_20 = 0.0;
float sGf11_15 = 0.0;
float sGf12_15 = 0.0;
float sGf21_15 = 0.0;
float sGf22_15 = 0.0;
float sPv0Sim_15 = 0.0;
float srPVsim2_15 = 0.0;
float srPVsim1_15 = 0.0;
float srDelPvsim_15 = 0.0;
// END_VAR
// VAR_TEMP
long int tTime; // : TIME ;
long int iTime;
// float rErKp ; // 偏差/比例偏差
float rDiff;
float rDiff_int; // 偏差临时量,用于判断是否超出控制带
float Verstaerk;
float RueckDiff;
float RueckAlt; // 上周期积分量
float dLmn; // 调节量
// unsigned char bUpp ;
// unsigned char bDownp ;
// unsigned char bUpn ;
// unsigned char bDownn ;
// unsigned char bHvar ;
unsigned char bIZv;
unsigned char bLMNnew;
unsigned char bPulse;
unsigned char bConzOn; // 控制带被执行
float rSeek;
float rPvDelt;
float rPvFil;
float rPV0;
float rPvdtOri;
float rPVsigned;
float rSpDelt; // 设定点的变化
float tw_durch_tu;
float gf;
float koeff;
float rCycle; // 步进控制器的采样时间(s)
float rTmLag; // 微分作用时间延时浮点值
float rDeltaI; // 积分值的变化
float rVal;
float rPvNew2;
float rNoiPvdt;
float rPvdtMax0;
float rPVin;
float rP_B_TM;
float rPvdt;
float rPvdt2;
float rPvdt3; // srPvdt2 初始值
// float rLmnPmod ; // 相称组件CONZONE修改
int iFilCyc; // 内部:周期号为中值滤波
int iVal;
float rT1sim; // 模拟时间常数
float rT2sim; // 模拟时间常数
float rKsim;
float rSumHp;
float rSumLp;
float rHp;
float rLp;
float rNptn; // 通过模拟顺序确定
float rNptnHl; // 通过仿真上限决定的顺序
float rNptnLl; // 通过仿真下限确定的顺序 // END_VAR void pid_tune( void ); void pid( void )
{
if ( COM_RST ) // 复位
{
PV = 0.0;
ER = 0.0;
LMN_P = 0.0;
LMN_I = 0.0;
LMN_D = 0.0;
LMN = 0.0;
LMN_PER = ;
PHASE = ;
QLMN_HLM = FALSE;
QLMN_LLM = FALSE;
QC_ACT = TRUE;
QPULSE = FALSE;
TUN_ON = FALSE;
UNDO_PAR = FALSE;
SAVE_PAR = FALSE;
LOAD_PID = FALSE;
sInvAlt = 0.0;
sIanteilAlt = I_ITLVAL;
sRestInt = 0.0;
sRestDif = 0.0;
sRueck = 0.0;
sLmn = 0.0;
srDiffSp = 0.0;
siPulsFil = ;
srPulsPv = 0.0;
spassPTm = 0.0;
sCycTmPass = 0.0;
sPTm = 0.0;
sbConzOn = FALSE;
sbReOpt = FALSE;
sGf11_30 = 0.0;
sGf12_30 = 0.0;
sGf21_30 = 0.0;
sGf22_30 = 0.0;
sPv0Sim_30 = 0.0;
srPVsim3_30 = 0.0;
srPVsim2_30 = 0.0;
srPVsim1_30 = 0.0;
srDelPvsim_30 = 0.0;
sGf11_20 = 0.0;
sGf12_20 = 0.0;
sGf21_20 = 0.0;
sGf22_20 = 0.0;
sPv0Sim_20 = 0.0;
srPVsim1_20 = 0.0;
srPVsim2_20 = 0.0;
srDelPvsim_20 = 0.0;
sGf11_15 = 0.0;
sGf12_15 = 0.0;
sGf21_15 = 0.0;
sGf22_15 = 0.0;
sPv0Sim_15 = 0.0;
srPVsim1_15 = 0.0;
srPVsim2_15 = 0.0;
srDelPvsim_15 = 0.0;
COM_RST = FALSE;
}
else
{
bLMNnew = ( !PULSE_ON || ( SELECT != && QC_ACT ) || SELECT == );
bPulse = ( SELECT == || SELECT == ) && PULSE_ON;
if ( PVPER_ON ) // 过程变量输入选择
{
switch ( PER_MODE )
{
case :
rPVin = PV_PER * 0.01;
break;
case :
rPVin = PV_PER * 3.616898e-003;
break;
default:
rPVin = PV_PER * 0.1;
break;
}
rPVin = rPVin * PV_FAC + PV_OFFS;
}
else
{
rPVin = PV_IN;
}
if ( bPulse )
{
srPulsPv = rPVin - sPvOld + srPulsPv;
siPulsFil = siPulsFil + ;
}
if ( bLMNnew )
{
if ( siPulsFil > )
{
PV = srPulsPv / siPulsFil + sPvOld;
}
else
{
PV = rPVin;
}
siPulsFil = ;
srPulsPv = 0.0;
if ( LOAD_PID && MAN_ON ) // 判断是否是PID和手动控制
{
if ( PID_ON )
{
if ( PID_CON.GAIN != 0.0 )
{
GAIN = PID_CON.GAIN;
TI = PID_CON.TI;
TD = PID_CON.TD;
CON_ZONE = 250.0 / GAIN;
}
else
{
PID_ON = FALSE;
}
}
if ( !PID_ON && PI_CON.GAIN != 0.0 )
{
GAIN = PI_CON.GAIN;
TI = PI_CON.TI;
TD = 0.0;
CONZ_ON = FALSE;
CON_ZONE = 250.0 / GAIN;
}
if ( CON_ZONE < 0.0 )
{
CON_ZONE = -CON_ZONE;
}
}
LOAD_PID = FALSE;
if ( UNDO_PAR && MAN_ON && PAR_SAVE.GAIN != 0.0 ) // 重新装载参数
{
PFAC_SP = PAR_SAVE.PFAC_SP;
GAIN = PAR_SAVE.GAIN;
TI = PAR_SAVE.TI;
TD = PAR_SAVE.TD;
D_F = PAR_SAVE.D_F;
CONZ_ON = PAR_SAVE.CONZ_ON;
CON_ZONE = PAR_SAVE.CON_ZONE;
}
UNDO_PAR = FALSE;
if ( SAVE_PAR ) // 存储参数
{
PAR_SAVE.PFAC_SP = PFAC_SP;
PAR_SAVE.GAIN = GAIN;
PAR_SAVE.TI = TI;
PAR_SAVE.TD = TD;
PAR_SAVE.D_F = D_F;
PAR_SAVE.CONZ_ON = CONZ_ON;
PAR_SAVE.CON_ZONE = CON_ZONE;
SAVE_PAR = FALSE;
}
iFilCyc = FIL_CYC; // 均值过滤器的周期数
if ( PHASE != )
{
iFilCyc = ;
}
rCycle = iFilCyc * CYCLE;
if ( PHASE < )
{
if ( bPulse )
{
rPvFil = PV;
}
else
{
rPvFil = ( PV - sPvOld ) * 0.1 + sPvOld;
}
sPvOld = rPvFil;
sctFil = ;
}
else
{
if ( sctFil < iFilCyc )
{
srPv = PV - sPvOld + srPv;
sctFil = sctFil + ;
}
if ( sctFil >= iFilCyc )
{
rPvdt = srPv / sctFil;
rPvFil = rPvdt + sPvOld;
rPvdt = rPvdt / rCycle;
sctFil = ;
srPv = 0.0;
rPvdtOri = rPvdt;
gf = siSpDir * PVDT;
rVal = rPvdt - gf;
if ( rVal < 0.0 )
{
rVal = -rVal;
}
srDPvdt = ( rVal - srDPvdt ) * 0.1 + srDPvdt;
if ( rPvdt > ( srDPvdt + gf ) )
{
rPvdt = srDPvdt + gf;
}
else if ( rPvdt > ( gf - srDPvdt ) )
{
rPvdt = gf - srDPvdt;
}
PVDT = rPvdt;
}
}
if ( !TUN_ON ) // 如果不需要整定
{
TUN_ST = FALSE;
sbSpChange = FALSE;
sbOptLmn = FALSE;
srOptLmn = 0.0;
srEffDlmn = 0.0;
PHASE = ;
QTUN_RUN = FALSE;
}
if ( sctFil == && TUN_ON ) // 判断是否需要整定
{
pid_tune( );
}
if ( PHASE <= && PHASE >= )
{
srPVsim1_30 = sGf11_30 * srPVsim1_30 + ( sLmn - LMN0 ) * sGf12_30;
srPVsim2_30 = sGf21_30 * srPVsim2_30 + sGf22_30 * srPVsim1_30;
srPVsim3_30 = sGf21_30 * srPVsim3_30 + sGf22_30 * srPVsim2_30;
srPVsim1_20 = sGf11_20 * srPVsim1_20 + ( sLmn - LMN0 ) * sGf12_20;
srPVsim2_20 = sGf21_20 * srPVsim2_20 + sGf22_20 * srPVsim1_20;
srPVsim1_15 = sGf11_15 * srPVsim1_15 + ( sLmn - LMN0 ) * sGf12_15;
srPVsim2_15 = sGf21_15 * srPVsim2_15 + sGf22_15 * srPVsim1_15;
}
rDiff = SP_INT - PV; // 偏差
rSpDelt = SP_INT - sSpOld;
if ( rDiff < -DEADB_W ) // 检查偏差是否低于死区宽度的负值
{
rDiff = rDiff + DEADB_W;
}
else if ( rDiff > DEADB_W ) // 检查偏差是否高于死区宽度
{
rDiff = rDiff - DEADB_W;
}
else
{
rDiff = 0.0;
}
ER = rDiff; // 偏差
rTmLag = TD / D_F;
LMN_P = GAIN * ER; // 比例分量
if ( TI != 0.0 && !I_ITL_ON )
{
if ( !MAN_ON && !sbOptLmn && !sbConzOn )
{
rDiff = CYCLE / TI * ( LMN_P + sInvAlt ) * 0.5 + sRestInt;
if ( ( rDiff > 0.0 && ( INT_HPOS || QLMN_HLM ) )
|| ( rDiff < 0.0 && ( INT_HNEG || QLMN_LLM ) ) )
{
rDiff = 0.0;
}
LMN_I = sIanteilAlt + rDiff;
sRestInt = sIanteilAlt - LMN_I + rDiff;
}
}
else
{
sRestInt = 0.0;
if ( I_ITL_ON )
{
LMN_I = I_ITLVAL;
}
else
{
LMN_I = 0.0;
}
}
if ( TD != 0.0 && !MAN_ON && !sbOptLmn && !sbConzOn )
{
Verstaerk = TD / ( CYCLE * 0.5 + rTmLag );
LMN_D = ( LMN_P - sRueck ) * Verstaerk;
RueckAlt = sRueck;
RueckDiff = CYCLE / TD * LMN_D + sRestDif;
sRueck = RueckDiff + RueckAlt;
sRestDif = RueckAlt - sRueck + RueckDiff;
}
else
{
LMN_D = 0.0;
sRestDif = 0.0;
sRueck = LMN_P;
}
bConzOn = FALSE;
rDeltaI = 0.0;
if ( sbOptLmn )
{
dLmn = srOptLmn + srEffDlmn;
}
else if ( MAN_ON )
{
dLmn = MAN;
}
else
{
dLmn = LMN_P + LMN_I + DISV; // PI输出
if ( !MAN_ON ) // 当PI控制时,将PID输出送到手动MAN
{
if ( dLmn > LMN_HLM )
{
MAN = LMN_HLM;
}
else if ( dLmn < LMN_LLM )
{
MAN = LMN_LLM;
}
else
{
MAN = dLmn;
}
}
dLmn = LMN_P + LMN_I + DISV + LMN_D; // PID输出
if ( TI != 0.0 && !I_ITL_ON )
{
if ( PFAC_SP > 1.0 )
{
PFAC_SP = 1.0;
}
else if ( PFAC_SP < 0.0 )
{
PFAC_SP = 0.0;
}
if ( PFAC_SP > 0.5 )
{
gf = 1.0 - PFAC_SP;
}
else
{
gf = PFAC_SP;
}
rDeltaI = GAIN * rSpDelt * ( PFAC_SP - 1.0 - gf );
srDiffSp = GAIN * rSpDelt * gf + srDiffSp;
srDiffSp = srDiffSp * gf * TI / ( gf * TI + CYCLE );
dLmn = dLmn + rDeltaI + srDiffSp;
if ( CONZ_ON )
{
gf = CON_ZONE * 0.8;
rDiff_int = ER;
if ( GAIN < 0.0 )
{
rDiff_int = -rDiff_int;
}
if ( rDiff_int >= CON_ZONE || ( rDiff_int >= gf && sbConzOn ) )
{
dLmn = LMN_HLM;
bConzOn = TRUE;
}
else if ( rDiff_int <= -CON_ZONE
|| ( rDiff_int <= -gf && sbConzOn ) )
{
dLmn = LMN_LLM;
bConzOn = TRUE;
}
}
if ( !bConzOn )
{
if ( LMN_HLM < sLmnHlmOld && dLmn > LMN_HLM )
{
rVal = dLmn;
if ( rVal > sLmnHlmOld )
{
rVal = sLmnHlmOld;
}
rDeltaI = rDeltaI - rVal + LMN_HLM;
}
else
{
if ( LMN_LLM > sLmnLlmOld && dLmn < LMN_LLM )
{
rVal = dLmn;
if ( rVal < sLmnLlmOld )
{
rVal = sLmnLlmOld;
}
rDeltaI = rDeltaI - rVal + LMN_LLM;
}
}
}
}
else
{
srDiffSp = 0.0;
}
}
sLmnHlmOld = LMN_HLM;
sLmnLlmOld = LMN_LLM;
sbConzOn = bConzOn;
sLmn = dLmn;
if ( sLmn > LMN_HLM )
{
QLMN_HLM = TRUE;
QLMN_LLM = FALSE;
sLmn = LMN_HLM;
}
else
{
QLMN_HLM = FALSE;
if ( sLmn <= LMN_LLM )
{
QLMN_LLM = TRUE;
sLmn = LMN_LLM;
}
else
{
QLMN_LLM = FALSE;
}
}
if ( TI != 0.0 )
{
if ( MAN_ON || sbOptLmn || sbConzOn )
{
srDiffSp = 0.0;
sRestInt = 0.0;
LMN_I = sLmn - LMN_P - DISV;
if ( sbConzOn )
{
MAN = sLmn;
}
}
else
{
LMN_I = LMN_I + rDeltaI;
if ( LMN_I > LMN_HLM - DISV && dLmn > LMN_HLM
&& dLmn - LMN_D > LMN_HLM )
{
rVal = LMN_HLM - DISV;
gf = dLmn - LMN_HLM;
rVal = LMN_I - rVal;
if ( rVal > gf )
{
rVal = gf;
}
LMN_I = LMN_I - rVal;
}
else if ( LMN_I < LMN_LLM - DISV && dLmn < LMN_LLM
&& dLmn - LMN_D < LMN_LLM )
{
rVal = LMN_LLM - DISV;
gf = dLmn - LMN_LLM;
rVal = LMN_I - rVal;
if ( rVal < gf )
{
rVal = gf;
}
LMN_I = LMN_I - rVal;
}
}
}
dLmn = sLmn;
sInvAlt = LMN_P;
sIanteilAlt = LMN_I;
sSpOld = SP_INT;
LMN = dLmn * LMN_FAC + LMN_OFFS;
dLmn = LMN * 264.8;
if ( dLmn >= 32511.0 )
{
dLmn = 32511.0;
}
else if ( dLmn <= -32512.0 )
{
dLmn = -32512.0;
}
LMN_PER = dLmn;
QC_ACT = !PULSE_ON;
sPTm = sLmn * PER_TM * 0.01;
if ( sLmn < 0.0 )
{
sPTm = 0.0;
}
}
if ( bPulse )
{
rP_B_TM = P_B_TM;
if ( rP_B_TM < CYCLE_P )
{
rP_B_TM = CYCLE_P;
}
bIZv = FALSE;
if ( QPULSE )
{
if ( spassPTm < rP_B_TM || sPTm >= spassPTm
|| sPTm >= PER_TM - rP_B_TM )
{
bIZv = TRUE;
}
if ( !bIZv )
{
QPULSE = FALSE;
}
}
else if ( spassPTm >= rP_B_TM && spassPTm >= PER_TM - sPTm
&& sPTm >= rP_B_TM )
{
QPULSE = TRUE;
}
else
{
bIZv = TRUE;
}
if ( bIZv )
{
if ( spassPTm < PER_TM )
{
spassPTm = spassPTm + CYCLE_P;
}
}
else
{
spassPTm = CYCLE_P * 1.5;
}
sCycTmPass = sCycTmPass + CYCLE_P;
siCycleP = siCycleP + ;
if ( sCycTmPass >= CYCLE )
{
QC_ACT = TRUE;
sCycTmPass = CYCLE_P * 0.5;
}
}
}
}
void pid_tune( void )
{
rPVsigned = rPvFil;
rSpDelt = SP_INT - sSpOld;
if ( PHASE > )
{
if ( PHASE < && !sbSpChange && ( rPvFil - PV0 ) * siSpDir < 0.0 )
{
siStatus = ;
siSpDir = -siSpDir;
srNoise = 0.0;
srNoise2 = 0.0;
PVDT0 = -PVDT0;
srPvdt2 = -srPvdt2;
PVDT_MAX = PVDT0;
srPvdtMax2 = PVDT0;
}
if ( sbSpChange )
{
rSeek = ( SP_INT - PV0 ) * 0.75;
}
else
{
rSeek = 0.0;
}
if ( siSpDir < )
{
rSeek = -rSeek;
rPvFil = -rPvFil;
rPvdtOri = -rPvdtOri;
PVDT = -PVDT;
rPV0 = -PV0;
}
else
{
rPV0 = PV0;
}
}
switch ( PHASE )
// 自整定过程
{
case : // 无整定,自动或手动模式
{
// tTime = TIME_TCK() ;
siTime = tTime;
siCycle = ;
siCycleP = ;
FIL_CYC = ; // 均值过滤器的周期数
LMN0 = sLmn;
srPvMin = PV;
PV0 = rPvFil;
NOISE_PV = 0.0;
siStatus = ;
siSpDir = ;
TUN_ST = FALSE;
SP_INT = sSpOld;
STATUS_H = ; // 缺省或(还)没有新的控制器参数。
PHASE = ;
}
break;
case : // 准备整定,检查参数,等待激励,测量采样时间.
{
siCycle = siCycle + ;
if ( siStatus < )
{
siStatus = siStatus + ;
}
LMN0 = ( sLmn - LMN0 ) / siStatus + LMN0;
rVal = PV - srPvMin;
if ( rVal < 0.0 )
{
NOISE_PV = NOISE_PV - rVal;
srPvMin = PV;
}
else if ( NOISE_PV < rVal )
{
NOISE_PV = rVal;
}
if ( rSpDelt != 0.0 || TUN_ST )
{
if ( rSpDelt != 0.0 )
{
sbSpChange = TRUE;
}
if ( SP_INT < PV && sbSpChange )
{
siSpDir = -;
}
srEffDlmn = TUN_DLMN;
gf = srEffDlmn + LMN0;
if ( gf > LMN_HLM )
{
srEffDlmn = LMN_HLM - LMN0;
}
else if ( gf < LMN_LLM )
{
srEffDlmn = LMN_LLM - LMN0;
}
if ( srEffDlmn < 5.0 && srEffDlmn > -5.0 )
{
STATUS_H = ; // 有效可调节变量差值 < 5 % ,修正可调节变量差值TUN_DLMN。
SP_INT = sSpOld;
TUN_ON = FALSE;
PHASE = ;
}
else
{
// tTime = TIME_TCK();
iTime = tTime;
if ( iTime > siTime )
{
iTime = iTime - siTime;
}
else
{
iTime = iTime + ;
iTime = iTime - siTime + ;
}
sCycleM = iTime;
srTime = sCycleM * 0.001;
sCycleM = srTime / siCycle;
srTime = ( CYCLE - sCycleM ) / CYCLE;
if ( srTime > 0.05 || srTime < -0.05 )
{
STATUS_H = ; // 采样时间CYCLE 和CYCLE_P 之间的差值超过了测量值的5%。
// 将CYCLE 和CYCLE_P 与周期性中断级的周期相比较,注意可能存在调用分配器。
// 检查CPU 的使用情况。如果CPU 处于高使用状态,则需要延长采样时间,该时间可以不和CYCLE 或CYCLE_P 匹配。
SP_INT = sSpOld;
TUN_ON = FALSE;
PHASE = ;
}
else
{
srPv = 0.0;
srNoise = 0.0;
POI_CMAX = ;
POI_CYCL = ;
PVDT0 = ( ( rPvFil - PV0 ) * siSpDir ) / ( siCycle * CYCLE );
PV0 = rPvFil;
P_INF = 0.0;
rPVsigned = PV;
srTime = 0.0;
PVDT_MAX = PVDT0;
NOI_PVDT = 0.0;
srDPvdt = 0.0;
srDPvdt2 = 0.0;
srPvdt2 = 0.0;
srPvdtMax2 = PVDT0;
srNoise2 = 0.0;
srPvOld2 = rPvFil;
siTime = ;
sbOptLmn = TRUE;
srOptLmn = LMN0;
siStatus = ;
siCycle = ;
PHASE = ;
QTUN_RUN = TRUE;
sbReOpt = FALSE;
}
}
}
}
break;
case : // 实际整定,等待在稳定的控制器输出值上检测到拐点.
{
rPvDelt = rPvFil - rPV0;
srTime = srTime + rCycle;
siCycle = siCycle + ;
if ( PVDT < PVDT_MAX || PVDT == 0.0 )
{
POI_CYCL = POI_CYCL + ;
if ( rPvdtOri >= PVDT_MAX )
{
POI_CYCL = ;
}
}
else
{
PVDT_MAX = PVDT;
if ( POI_CYCL > )
{
iVal = POI_CYCL * ;
if ( POI_CMAX <= iVal )
{
POI_CMAX = iVal;
}
POI_CYCL = ;
}
}
siTime = siTime + ;
if ( siTime == )
{
rPvNew2 = ( sPvOld + rPVsigned ) * 0.5;
rPvdt2 = ( rPvNew2 - srPvOld2 ) / ( 2.0 * rCycle ) * siSpDir;
rVal = rPvdt2 - srPvdt2;
if ( rVal < 0.0 )
{
rVal = -rVal;
}
srDPvdt2 = ( rVal - srDPvdt2 ) * 0.1 + srDPvdt2;
if ( rPvdt2 > srDPvdt2 + srPvdt2 )
{
rPvdt2 = srDPvdt2 + srPvdt2;
}
else if ( rPvdt2 < srDPvdt2 - srPvdt2 )
{
rPvdt2 = srDPvdt2 - srPvdt2;
}
rPvdt3 = ( rPvdt2 + srPvdt2 ) * 0.5;
srPvdt2 = rPvdt2;
if ( srPvdtMax2 < srPvdt2 )
{
srPvdtMax2 = srPvdt2;
}
gf = srPvdtMax2 - srPvdt2;
if ( srNoise2 < gf )
{
srNoise2 = gf;
}
}
if ( PVDT_MAX != 0.0 )
{
rNoiPvdt = 100.0 * srNoise / PVDT_MAX;
}
else
{
rNoiPvdt = 100.0;
}
rPvdtMax0 = PVDT_MAX - PVDT0;
if ( ( ( rPvDelt < 0.8 * rSeek || !sbSpChange ) && QTUN_RUN
&& FIL_CYC < && siTime == )
&& ( ( ( siCycle > && PVDT == 0.0 || siStatus == )
|| ( ( rNoiPvdt > 60.0 && siCycle > )
&& ( POI_CYCL < || srPvdt2 > 0.99 * srPvdtMax2 ) ) )
|| ( rNoiPvdt > 5.0 && siCycle > && POI_CYCL < ) ) )
{
FIL_CYC = FIL_CYC * ; // 均值过滤器的周期数
rPVsigned = ( sPvOld + rPVsigned ) * 0.5;
srDPvdt = srDPvdt2;
srNoise = srNoise2;
PVDT_MAX = srPvdtMax2;
PVDT = srPvdtMax2;
POI_CYCL = ;
srPvOld2 = ( srPvOld2 + rPvNew2 ) * 0.5;
srPvdtMax2 = PVDT0;
srDPvdt2 = srNoise2 * 0.5;
srNoise2 = 0.0;
srPvdt2 = rPvdt3;
siTime = ;
siCycle = ;
siStatus = ;
}
if ( siTime == )
{
srPvOld2 = rPvNew2;
siTime = ;
}
if ( rPvDelt > rSeek * 0.3 )
{
if ( POI_CYCL >= POI_CMAX
&& ( rPvDelt - siSpDir * P_INF ) > 2.0 * NOISE_PV
&& rPvDelt > 1.2 * P_INF * siSpDir )
{
QTUN_RUN = FALSE;
if ( !TUN_KEEP )
{
PHASE = ;
}
}
else if ( rPvDelt > rSeek && sbSpChange )
{
if ( POI_CYCL == )
{
POI_CYCL = ;
}
STATUS_H = STATUS_H + ;
QTUN_RUN = FALSE;
PHASE = ;
}
}
if ( POI_CYCL == )
{
if ( rPvdtMax0 > 1.000000e-009 )
{
rVal = srNoise;
gf = rPvdtMax0 * 1.99;
if ( rVal > gf )
{
rVal = gf;
}
NOI_PVDT = 100.0 * rVal / rPvdtMax0;
rPvdtMax0 = rPvdtMax0 - rVal * 0.45;
TU = ( ( PVDT_MAX - rVal * 0.45 ) * srTime - rPvDelt ) / rPvdtMax0
- ( rCycle - CYCLE ) * 0.5;
KIG = rPvdtMax0 / srEffDlmn * siSpDir * 100.0;
P_INF = siSpDir * rPvDelt;
T_P_INF = srTime - 2.0 * rCycle;
rT1sim = 1.129 * TU;
rT2sim = 105.72 * TU;
rKsim = 1.1103 * TU * KIG;
sGf11_15 = rT1sim / ( rT1sim + CYCLE );
sGf12_15 = CYCLE / ( rT1sim + CYCLE ) * rKsim * siSpDir;
sGf21_15 = rT2sim / ( rT2sim + CYCLE );
sGf22_15 = CYCLE / ( rT2sim + CYCLE );
sPv0Sim_15 = 1.29 * PVDT0 * rT2sim + PV0;
srPVsim2_15 = rPvFil - sPv0Sim_15;
srPVsim1_15 = rT2sim * PVDT + srPVsim2_15;
rT1sim = 3.57 * TU;
rT2sim = 3.57 * TU;
rKsim = 0.097 * KIG * TU;
sGf11_20 = rT1sim / ( rT1sim + CYCLE );
sGf12_20 = CYCLE / ( rT1sim + CYCLE ) * rKsim * siSpDir;
sGf21_20 = rT2sim / ( rT2sim + CYCLE );
sGf22_20 = CYCLE / ( rT2sim + CYCLE );
sPv0Sim_20 = 1.6 * PVDT0 * rT2sim + PV0;
srPVsim2_20 = rPvFil - sPv0Sim_20;
srPVsim1_20 = rT2sim * PVDT + srPVsim2_20;
rT1sim = 1.247 * TU;
rT2sim = 1.247 * TU;
rKsim = 0.046 * KIG * TU;
sGf11_30 = rT1sim / ( rT1sim + CYCLE );
sGf12_30 = CYCLE / ( rT1sim + CYCLE ) * rKsim * siSpDir;
sGf21_30 = rT2sim / ( rT2sim + CYCLE );
sGf22_30 = CYCLE / ( rT2sim + CYCLE );
sPv0Sim_30 = 3.0 * PVDT0 * rT2sim + PV0;
srPVsim3_30 = rPvFil - sPv0Sim_30;
srPVsim2_30 = rT2sim * PVDT + srPVsim3_30;
srPVsim1_30 = rT2sim * PVDT + srPVsim2_30;
}
}
if ( POI_CYCL > )
{
gf = PVDT_MAX - PVDT;
if ( srNoise < gf )
{
srNoise = gf;
}
}
}
break;
case : // 过程参数的计算.整定前有效的控制器参数被保存.
{
srTime = T_P_INF;
if ( TU < 3.0 * CYCLE )
{
tw_durch_tu = srTime / TU;
TU = 3.0 * CYCLE;
srTime = TU * tw_durch_tu;
STATUS_H = STATUS_H + ;
}
else if ( TU > 0.7 * srTime )
{
TU = 0.7 * srTime;
STATUS_H = STATUS_H + ;
}
tw_durch_tu = srTime / TU;
TA = tw_durch_tu * 0.76 * tw_durch_tu - 0.044;
if ( tw_durch_tu < 2.469 )
{
TA = ( tw_durch_tu - 2.469 ) * 0.48 + TA;
}
gf = TA - 0.3954;
N_PTN = ( gf * 1.1 + 7.9826 ) / gf;
TA = TA * TU;
if ( N_PTN < 1.01 )
{
N_PTN = 1.01;
STATUS_H = STATUS_H + ;
}
else if ( N_PTN > )
{
N_PTN = ;
STATUS_H = STATUS_H + ;
}
srNoise = NOI_PVDT * 0.01 * ( PVDT_MAX - PVDT0 );
GAIN_P = 0.01 * KIG * TA;
if ( STATUS_H < )
{
STATUS_H = ; // 整定已结束,并且已经找到合适的控制器参数
}
else
{
STATUS_H = STATUS_H + ;
}
STATUS_D = ; // 没有计算任何控制器参数
PAR_SAVE.PFAC_SP = PFAC_SP;
PAR_SAVE.GAIN = GAIN;
PAR_SAVE.TI = TI;
PAR_SAVE.TD = TD;
PAR_SAVE.D_F = D_F;
PAR_SAVE.CONZ_ON = CONZ_ON;
PAR_SAVE.CON_ZONE = CON_ZONE;
PHASE = ;
}
break;
case : // 控制器的设计
{
TM_LAG_P = ( srTime + CYCLE ) / ( N_PTN - 1.0 );
if ( N_PTN >= 2.1 )
{
PI_CON.GAIN = ( N_PTN + 2.0 ) / ( N_PTN - 1.0 ) / 4.0 / GAIN_P;
PI_CON.TI = ( 2.0 + N_PTN ) * TM_LAG_P / 3.0;
koeff = 7.0 * N_PTN + 16.0;
if ( N_PTN <= 2.6 )
{
PID_CON.GAIN = 3.5625 / GAIN_P;
STATUS_D = ; // N_PTN >= 2.1,过程类型III,快速
}
else
{
PID_CON.GAIN = koeff / ( N_PTN - 2.0 ) / 16.0 / GAIN_P;
STATUS_D = ; // N_PTN > 2.6,过程类型III
}
PID_CON.TI = koeff * TM_LAG_P / 15.0;
PID_CON.TD = ( 1.0 + N_PTN ) * ( 3.0 + N_PTN ) * TM_LAG_P / koeff;
CONZ_ON = FALSE;
}
else
{
STATUS_D = ; // N_PTN <= 1.5,过程类型I,快速
CONZ_ON = TRUE;
PI_CON.TI = 6.0 * TU;
PI_CON.GAIN = 44.0 / TU / KIG;
PID_CON.TI = 2.0 * TU;
PID_CON.GAIN = 2.727272 * PI_CON.GAIN;
gf = 2.0;
if ( N_PTN > 1.5 )
{
gf = gf - ( N_PTN - 1.5 ) * 2.5;
STATUS_D = ; // N_PTN > 1.5,过程类型I
}
if ( N_PTN > 1.9 )
{
PI_CON.GAIN = PI_CON.GAIN * gf;
PID_CON.TI = ( ( 1.0 - gf ) * 4.0 + 1.0 ) * PID_CON.TI;
STATUS_D = ; // N_PTN > 1.9,过程类型II (中间范围)
};
PID_CON.GAIN = PID_CON.GAIN * gf;
PID_CON.TD = PID_CON.TI / 4.0;
}
PFAC_SP = 0.8;
D_F = 5.0;
if ( PID_ON )
{
GAIN = PID_CON.GAIN;
TI = PID_CON.TI;
TD = PID_CON.TD;
}
else
{
GAIN = PI_CON.GAIN;
TI = PI_CON.TI;
TD = 0.0;
CONZ_ON = FALSE;
}
CON_ZONE = 250.0 / GAIN;
if ( CON_ZONE < 0.0 )
{
CON_ZONE = -CON_ZONE;
}
if ( !TUN_KEEP )
{
srOptLmn = 0.75 * srEffDlmn + LMN0;
srEffDlmn = 0.0;
PHASE = ;
}
else
{
STATUS_D = ; // 没有计算任何控制器参数
} }
break;
case : // 使控制器处理新的可调节变量
{
sbOptLmn = FALSE;
MAN_ON = FALSE;
if ( sbReOpt )
{
PHASE = ;
TUN_ON = FALSE;
if ( N_PTN <= 1.9 )
{
gf = ( 2.1 - N_PTN ) * 5.0;
TA = gf * TA;
GAIN_P = GAIN_P * gf;
}
STATUS_D = STATUS_D + ; // 111、122、201、311、321在阶段7 修正参数。
}
else
{
srTime = 0.0;
PHASE = ;
srDelPvsim_30 = 0.0;
srDelPvsim_20 = 0.0;
srDelPvsim_15 = 0.0;
}
}
break;
case : // 检查过程类型
{
srTime = srTime + rCycle;
if ( srTime >= 0.3 * TA )
{
srDelPvsim_15 = ( srPVsim2_15 + sPv0Sim_15 ) - PV + srDelPvsim_15;
srDelPvsim_20 = ( srPVsim2_20 + sPv0Sim_20 ) - PV + srDelPvsim_20;
srDelPvsim_30 = ( srPVsim2_30 + sPv0Sim_30 ) - PV + srDelPvsim_30;
if ( srTime >= 0.35 * TA )
{
sNpInf = N_PTN;
if ( srDelPvsim_15 < 0.0 )
{
if ( N_PTN < 1.5 )
{
sbReOpt = FALSE;
}
else
{
N_PTN = 1.5;
sbReOpt = TRUE;
}
}
else if ( srDelPvsim_30 > 0.0 )
{
if ( N_PTN > 3.0 )
{
sbReOpt = FALSE;
}
else
{
N_PTN = 3.0;
sbReOpt = TRUE;
}
}
else
{
if ( srDelPvsim_15 > 0.0 && srDelPvsim_20 < 0.0 )
{
rSumHp = -srDelPvsim_20;
rSumLp = srDelPvsim_15;
rHp = 2.0;
rLp = 1.5;
}
else if ( srDelPvsim_20 > 0.0 && srDelPvsim_30 < 0.0 )
{
rSumHp = -srDelPvsim_30;
rSumLp = srDelPvsim_20;
rHp = 3.0;
rLp = 2.0;
}
rNptn = ( rSumHp * rLp + rSumLp * rHp ) / ( rSumHp + rSumLp );
rNptnHl = rNptn + 0.1;
rNptnLl = rNptn - 0.1;
if ( N_PTN > rNptnHl )
{
N_PTN = rNptnHl;
sbReOpt = TRUE;
}
else if ( N_PTN < rNptnLl )
{
N_PTN = rNptnLl;
sbReOpt = TRUE;
}
else
{
sbReOpt = FALSE;
}
}
if ( sbReOpt )
{
srOptLmn = sLmn;
sbOptLmn = TRUE;
PHASE = ;
}
else
{
TUN_ON = FALSE;
PHASE = ;
if ( N_PTN <= 1.9 )
{
gf = ( 2.1 - N_PTN ) * 5.0;
TA = gf * TA;
GAIN_P = GAIN_P * gf;
}
}
}
}
}
break;
default:
break;
}
sPvOld = rPVsigned;
}
基于西门子PID程序的C程序代码(带自整定功能哦)
共享一个西门子PLC上所使用的软件PID程序(FB58),我已将其改为C语言代码,并已在关键地方附有中文注释,带自整定功能。
经测试,自整定后的PID参数非常好用,这就解决了繁琐的参数整定问题了。
不过就是占内存大些,基本都是浮点运算,如果使用stm32f3或f4那就更爽了。
再上传一份西门子fb58的中文资料供参考。(后续补充说明在8楼。)
有一问题需要补充下:
TIME_TCK()函数需要自已添加,他的功能大意是在自整定的1阶段时需要外部定时器计时,
这个定时器要跟程序循环周期参数做比较,差值超过5%整定就会失败的。
TIME_TCK()函数只要在外面用1ms的定时器就可以了。
另外在C原程序中将//tTime = TIME_TCK();
去掉注释,我没记错的话应该是两个地方。例如:
void TIM6_DAC_IRQHandler( void ) //1ms中断程序
{
TIM_ClearFlag( TIM6, TIM_FLAG_Update );
if ( Time_zzd++ >= )
Time_zzd = ;
}
在PID程序中添加以下函数:
static s32 TIME_TCK(void)
{
return (Time_zzd);
}
我大略研究过,这个FB58的PID程序是经过优化的,即积分使用的是抗积分饱,微分属于不完全微分功能。
整定后的参数有两组PI和PID,用户可以随时调用或切换。
所以这个PID程序我认为已经可以满足大多数场合的需要了,
当然也不只是控制温度变量,其它压力,流量等慢速响应变量都可以应用的
SIMATIC PID温度控制的更多相关文章
- Gcode命令【转】
https://www.jianshu.com/p/f8a328457a45 简述 研究过3D打印机的朋友,都会用到G-code文件.要使用3D打印机打印东西要经过几个步骤: 1.创建3 ...
- PID算法笔记2
总所周知,PID算法是个很经典的东西.而做自平衡小车,飞行器PID是一个必须翻过的坎.因此本节我们来好好讲解一下PID,根据我在学习中的体会,力求通俗易懂.并举出PID的形象例子来帮助理解PID.一. ...
- 浅谈 pid的原理与差异
pid 官方语言就是:比例 积分 微分.究其本质意义,比例到底是什么,原理是什么,这三个到底如何在物理世界这种运作的,大概了解的人又很少.过惯了拿起数据公式无脑推的日子的人更是如此,数学公式是很 ...
- 单片机之PID算法
说到PID算法,想必大部人并不陌生,PID算法在很多方面都有重要应用,比如电机的速度控制,恒温槽的温度控制,四轴飞行器的平衡控制等等,作为闭环控制系统中的一种重要算法,其优点和可实现性都成为人们的首选 ...
- PID控制器(比例-积分-微分控制器)- I
形象解释PID算法 小明接到这样一个任务: 有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置,就要往水缸里加水. 小明接到任务后就一直守在水 ...
- PID控制温度
总所周知,PID算法是个很经典的东西.而做自平衡小车,飞行器PID是一个必须翻过的坎.因此本节我们来好好讲解一下PID,根据我在学习中的体会,力求通俗易懂.并举出PID的形象例子来帮助理解PID.一. ...
- 数字pid笔记(2)
void pid_Cal(void) { //float index = 0; IncPid * p = NULL; p = &g_PID_Inc; p->SetVal = sys_pa ...
- PID算法知识点博文收藏记录
https://blog.csdn.net/Uncle_GUO/article/details/51367764 https://blog.csdn.net/HandsomeHong/article/ ...
- PID基础
经常有人会问到PID的用法,今天小编在这里例举温度控制中的PID部分,希望能够把PID的具体应用说明白. 先说几个名词: 1.直接计算法和增量算法:这里的所谓增量算法就是相对于标准算法的相邻两次运算之 ...
随机推荐
- 200行代码实现RPC框架
之前因为项目需要,基于zookeeper和thrift协议实现了一个简单易用的RPC框架,核心代码不超过200行. zookeeper主要作用是服务发现,thrift协议作为通信传输协议, 基于com ...
- python爬虫-图片批量下载
# 爬起摄图网的图片批量下载# coding:utf-8 import requests from bs4 import BeautifulSoup from scipy.misc import im ...
- linux笔记_day12_shell编程
1.shell中如何进行算术运算 A=1 B=2 1)let 算术运算表达式 let C=$A+$B 2)$[算术运算表达式] C=$[$A+$B] 3)$(($A+$B)) 4) expr 算术表达 ...
- 图解USB协议之一 枚举过程【转】
转自:http://blog.csdn.net/myarrow/article/details/8270060 0. 枚举流程 • 连接了设备的 HUB 在 HOST 查询其状态改变端点 时返回对应的 ...
- centos7和centos6的区别【转】
最近发的文章,有人咨询我,说为啥不用centos7,而用centos6,这个跟个人习惯和生产环境元素决定的.centos7和6变化的就很大的.我收集了一些区别,给大家看看. 注意:生产环境推荐cent ...
- springcloud使用使用Feign-Ribbon做负载均衡实现声明式REST调用
什么是Feign Feign是一个声明式的伪Http客户端,它使得写Http客户端变得更简单.使用Feign,只需要创建一个接口并注解.它具有可插拔的注解特性,可使用Feign 注解和JAX-RS注解 ...
- 【linux】shell中命令替换$(cmd)和符号`cmd`
来源:https://zhidao.baidu.com/question/485498670.html 作用: $(cmd)和`cmd`的作用是相同的,在执行一条命令时,会先将其中的 ``,或者是$( ...
- python包管理之Pip安装及使用
Python有两个著名的包管理工具easy_install.py和pip.在Python2.7的安装包中,easy_install.py是默认安装的,而pip需要我们手动安装. pip可以运行在Uni ...
- 定制自己的new和delete:operator new 和 operator delete
new和delete不同用法 基本用法 int * aptr = new int(10); delete aptr, aptr = nullptr; 上面的代码是我们最基本也是最常见的使用new和de ...
- How to return plain text from AWS Lambda & API Gateway
With limited experience in AWS Lambda & API Gateway, it's struggling to find the correct way to ...