pytorch实现yolov3(3) 实现forward
之前的文章里https://www.cnblogs.com/sdu20112013/p/11099244.html实现了网络的各个layer.
本篇来实现网络的forward的过程.
定义网络
class Darknet(nn.Module):
def __init__(self, cfgfile):
super(Darknet, self).__init__()
self.blocks = parse_cfg(cfgfile)
self.net_info, self.module_list = create_modules(self.blocks)
实现网络的forward过程
forward函数继承自nn.Module
Convolutional and Upsample Layers
if module_type == "convolutional" or module_type == "upsample":
x = self.module_list[i](x)
Route Layer / Shortcut Layer
在上一篇里讲过了,route layer的输出是之前某一层或某两层在depth方向的连接.即
output[current_layer] = output[previous_layer]
或者
map1 = outputs[i + layers[0]]
map2 = outputs[i + layers[1]]
output[current layer]=torch.cat((map1, map2), 1)
所以route layer代码如下:
elif module_type == "route":
layers = module["layers"]
layers = [int(a) for a in layers]
if (layers[0]) > 0:
layers[0] = layers[0] - i
if len(layers) == 1:
x = outputs[i + (layers[0])]
else:
if (layers[1]) > 0:
layers[1] = layers[1] - i
map1 = outputs[i + layers[0]]
map2 = outputs[i + layers[1]]
x = torch.cat((map1, map2), 1)
shortcut layer的输出为前一层及前xx层(配置文件中配置)的输出之和
elif module_type == "shortcut":
from_ = int(module["from"])
x = outputs[i-1] + outputs[i+from_]
YOLO layer
yolo层的输出是一个n*n*depth的feature map矩阵.假设你想访问第(5,6)个cell的第2个boundingbox的话你需要map[5,6,(5+C):2*(5+C)]这样访问,这种形式操作起来有点麻烦,所以我们引入一个predict_transform函数来改变一下输出的形式.
简而言之我们希望把一个batch_size*grid_size*grid_size*(B*(5+C))的4-D矩阵转换为batch_size*(grid_size*grid_size*B)*(5+C)的矩阵.
2-D矩阵的每一行的排列如下:
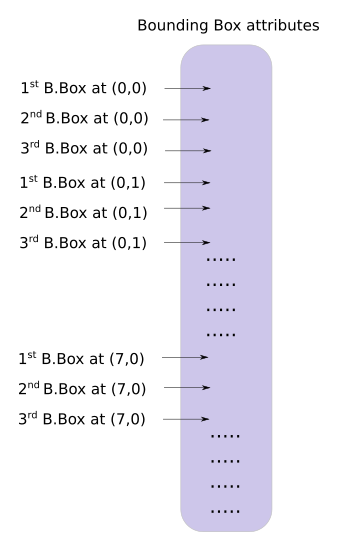
batch_size = prediction.size(0)
stride = inp_dim // prediction.size(2)
grid_size = inp_dim // stride
bbox_attrs = 5 + num_classes
num_anchors = len(anchors)
prediction = prediction.view(batch_size, bbox_attrs*num_anchors, grid_size*grid_size)
prediction = prediction.transpose(1,2).contiguous()
prediction = prediction.view(batch_size, grid_size*grid_size*num_anchors, bbox_attrs)
上述代码涉及到pytorch中view的用法,和numpy中resize类似.contiguous一般与transpose,permute,view搭配使用,维度变换后tensor在内存中不再是连续存储的,而view操作要求连续存储,所以需要contiguous.最终我们得到一个batch_size*(grid_size*grid_size*num_anchors)*bbox_attrs的矩阵.
接下来要对预测boundingbox的坐标.
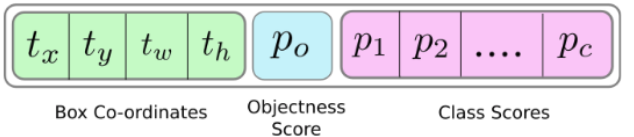
注意此时prediction[:,:,0],prediction[:,:,1],prediction[:,:,2],prediction[:,:,3]prediction[:,:,4]即相应的tx,ty,tw,th,obj score.
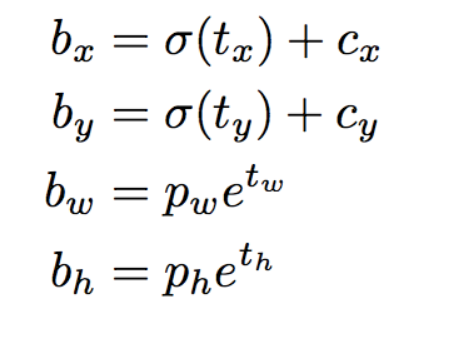
接下来是预测相对当前cell左上角的offset
#sigmoid转换为0-1范围内
#Sigmoid the centre_X, centre_Y. and object confidencce
prediction[:,:,0] = torch.sigmoid(prediction[:,:,0])
prediction[:,:,1] = torch.sigmoid(prediction[:,:,1])
prediction[:,:,4] = torch.sigmoid(prediction[:,:,4])
#Add the center offsets
grid = np.arange(grid_size)
a,b = np.meshgrid(grid, grid)
x_offset = torch.FloatTensor(a).view(-1,1)
y_offset = torch.FloatTensor(b).view(-1,1)
if CUDA:
x_offset = x_offset.cuda()
y_offset = y_offset.cuda()
x_y_offset = torch.cat((x_offset, y_offset), 1).repeat(1,num_anchors).view(-1,2).unsqueeze(0)
#prediction[:,:,:0],prediction[:,:,:1]修改为相对于当前cell偏移
prediction[:,:,:2] += x_y_offset
有关meshgrid用法效果如下:
import numpy as np
import torch
grid_size = 13
grid = np.arange(grid_size)
a,b = np.meshgrid(grid, grid)
print(a)
print(b)
x_offset = torch.FloatTensor(a).view(-1,1)
#print(x_offset)
y_offset = torch.FloatTensor(b).view(-1,1)
这段代码输出如下:

预测boundingbox的width,height.注意anchors的大小要转换为适配当前feature map的大小.配置文件中配置的是相对于模型输入的大小.
anchors = [(a[0]/stride, a[1]/stride) for a in anchors] #适配到feature map上的尺寸
#log space transform height and the width
anchors = torch.FloatTensor(anchors)
if CUDA:
anchors = anchors.cuda()
anchors = anchors.repeat(grid_size*grid_size, 1).unsqueeze(0)
prediction[:,:,2:4] = torch.exp(prediction[:,:,2:4])*anchors
##还原为原始图片上对应的坐标
prediction[:,:,:4] *= stride
预测class probability
prediction[:,:,5: 5 + num_classes] = torch.sigmoid((prediction[:,:, 5 : 5 + num_classes]))
predict_transform完整代码如下
#yolo经过不断地卷积得到的feature map size= batch_size*(B*(5+C))*grid_size*grid_size
def predict_transform(prediction, inp_dim, anchors, num_classes, CUDA = True):
if CUDA:
prediction = prediction.to(torch.device("cuda")) #使用gpu torch0.4不需要 torch1.0需要
batch_size = prediction.size(0)
stride = inp_dim // prediction.size(2)
grid_size = inp_dim // stride
bbox_attrs = 5 + num_classes
num_anchors = len(anchors)
print("prediction.shape=",prediction.shape)
print("batch_size=",batch_size)
print("inp_dim=",inp_dim)
#print("anchors=",anchors)
#print("num_classes=",num_classes)
print("grid_size=",grid_size)
print("bbox_attrs=",bbox_attrs)
prediction = prediction.view(batch_size, bbox_attrs*num_anchors, grid_size*grid_size)
prediction = prediction.transpose(1,2).contiguous()
prediction = prediction.view(batch_size, grid_size*grid_size*num_anchors, bbox_attrs)
#Sigmoid the centre_X, centre_Y. and object confidencce
prediction[:,:,0] = torch.sigmoid(prediction[:,:,0])
prediction[:,:,1] = torch.sigmoid(prediction[:,:,1])
prediction[:,:,4] = torch.sigmoid(prediction[:,:,4])
#Add the center offsets
grid = np.arange(grid_size).astype(np.float32)
a,b = np.meshgrid(grid, grid)
x_offset = torch.FloatTensor(a).view(-1,1)
y_offset = torch.FloatTensor(b).view(-1,1)
if CUDA:
x_offset = x_offset.cuda()
y_offset = y_offset.cuda()
x_y_offset = torch.cat((x_offset, y_offset), 1).repeat(1,num_anchors).view(-1,2).unsqueeze(0)
print(type(x_y_offset),type(prediction[:,:,:2]))
prediction[:,:,:2] += x_y_offset
anchors = [(a[0]/stride, a[1]/stride) for a in anchors] #适配到和feature map大小匹配
#log space transform height and the width
anchors = torch.FloatTensor(anchors)
if CUDA:
anchors = anchors.cuda()
anchors = anchors.repeat(grid_size*grid_size, 1).unsqueeze(0)
prediction[:,:,2:4] = torch.exp(prediction[:,:,2:4])*anchors
prediction[:,:,5: 5 + num_classes] = torch.sigmoid((prediction[:,:, 5 : 5 + num_classes]))
prediction[:,:,:4] *= stride #恢复到原始图片上的相应坐标,width,height等
return prediction
助手函数写好了,现在来继续实现Darknet类的forward方法
elif module_type == "yolo":
anchors = self.module_list[i][0].anchors
inp_dim = int(self.net_info["height"])
num_classes = int (module["classes"])
x = x.data
x = predict_transform(x, inp_dim, anchors, num_classes, CUDA)
if not write: #if no collector has been intialised.
detections = x
write = 1
else:
detections = torch.cat((detections, x), 1)
在没有写predict_transform之前,不同的feature map矩阵,比如13*13*N1,26*26*N2,52*52*N3是没法直接连接成一个tensor的,现在都变成了xx*(5+C)则可以了.
上面代码里的write flag主要是为了区别detections是否为空,为空则说明是第一个yolo layer做的预测,将yolo层的输出赋值给predictions,不为空则连接当前yolo layer的输出至detections.
测试
下载测试图片wget https://github.com/ayooshkathuria/pytorch-yolo-v3/raw/master/dog-cycle-car.png
{kind=link}
def get_test_input():
img = cv2.imread("dog-cycle-car.png")
img = cv2.resize(img, (608,608)) #Resize to the input dimension
img_ = img[:,:,::-1].transpose((2,0,1)) # BGR -> RGB | H X W C -> C X H X W
img_ = img_[np.newaxis,:,:,:]/255.0 #Add a channel at 0 (for batch) | Normalise
img_ = torch.from_numpy(img_).float() #Convert to float
img_ = Variable(img_) # Convert to Variable
return img_
model = Darknet("cfg/yolov3.cfg")
inp = get_test_input()
pred = model(inp, torch.cuda.is_available())
print (pred)
cv2.imread()导入图片时是BGR通道顺序,并且是h*w*c,比如416*416*3这种格式,我们要转换为3*416*416这种格式.如果有
- RuntimeError: expected type torch.FloatTensor but got torch.cuda.FloatTensor
在predict_transform开头添加prediction = prediction.to(torch.device("cuda")) #使用gpu - RuntimeError: shape '[1, 255, 3025]' is invalid for input of size 689520
注意检查你的input的img的大小和你模型的输入大小是否匹配. 比如模型是608*608的
最终测试结果如下:
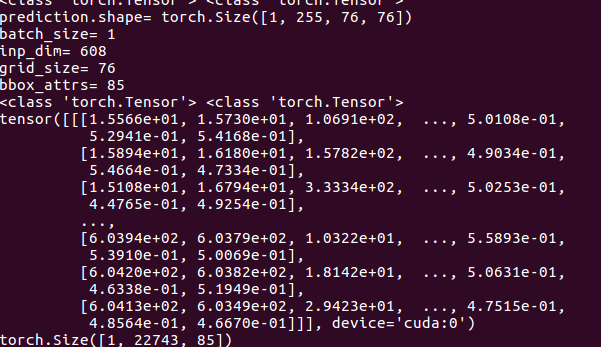
预测出22743个boundingbox,一共3种feature map,分别为19*19,38*38,76*76 每种尺度下预测出3个box,一共3*(19*19 + 38*38 + 76*76) = 22743个box.
pytorch实现yolov3(3) 实现forward的更多相关文章
- Pytorch版本yolov3源码阅读
目录 Pytorch版本yolov3源码阅读 1. 阅读test.py 1.1 参数解读 1.2 data文件解析 1.3 cfg文件解析 1.4 根据cfg文件创建模块 1.5 YOLOLayer ...
- 目标检测-基于Pytorch实现Yolov3(1)- 搭建模型
原文地址:https://www.cnblogs.com/jacklu/p/9853599.html 本人前段时间在T厂做了目标检测的项目,对一些目标检测框架也有了一定理解.其中Yolov3速度非常快 ...
- yolov3 进化之路,pytorch运行yolov3,conda安装cv2,或者conda安装找不到包问题
yolov3 进化之路,pytorch运行yolov3,conda安装cv2,或者conda安装找不到包问题 conda找不到包的解决方案. 目前是最快最好的实时检测架构 yolov3进化之路和各种性 ...
- pytorch实现yolov3(2) 配置文件解析及各layer生成
配置文件 配置文件yolov3.cfg定义了网络的结构 .... [convolutional] batch_normalize=1 filters=64 size=3 stride=2 pad=1 ...
- pytorch实现yolov3(4) 非极大值抑制nms
在上一篇里我们实现了forward函数.得到了prediction.此时预测出了特别多的box以及各种class probability,现在我们要从中过滤出我们最终的预测box. 理解了yolov3 ...
- pytorch实现yolov3(1) yolov3基本原理
理解一个算法最好的就是实现它,对深度学习也一样,准备跟着https://blog.paperspace.com/how-to-implement-a-yolo-object-detector-in-p ...
- pytorch实现yolov3(5) 实现端到端的目标检测
torch实现yolov3(1) torch实现yolov3(2) torch实现yolov3(3) torch实现yolov3(4) 前面4篇已经实现了network的forward,并且将netw ...
- pytorch版yolov3训练自己数据集
目录 1. 环境搭建 2. 数据集构建 3. 训练模型 4. 测试模型 5. 评估模型 6. 可视化 7. 高级进阶-网络结构更改 1. 环境搭建 将github库download下来. git cl ...
- 如何使用 pytorch 实现 yolov3
前言 看了 Yolov3 的论文之后,发现这论文写的真的是很简短,神经网络的具体结构和损失函数的公式都没有给出.所以这里参考了许多前人的博客和代码,下面进入正题. 网络结构 Yolov3 将主干网络换 ...
随机推荐
- 衡量镜头解像能力性能的指标-MTF曲线
MTF(Modulation Transfer Function,模量传递函数),是目前分析镜头解像能力的方法,可以用来评判镜头还原物体对比度的能力.说到MTF,不得不先提一下衡量镜头性能的两在重要指 ...
- BigTable读后笔记
BigTable读后笔记 GFS可能出现重复记录或者padding,Bigtable如何处理这种情况使得对外提供强一致性模型? ANS: Bigtable写入GFS的数据分为两种: 1)操作日志,当T ...
- Tab选项卡界面(1)
Tab用一个简单的应用程序接口的标签是集中的界面布局文件的同一页上的接口组件不同的标签.并计划将在主类集中的代码文件.这种方法的优点是,文件在项目数不会被添加,但是,假设Tab接口组件更个性化的标签. ...
- WPF Timeline简易时间轴控件的实现
原文:WPF Timeline简易时间轴控件的实现 效果图: 由于整个控件是实现之后才写的教程,因此这里记录的代码是最终实现后的,前后会引用到其他的一些依赖属性或者代码,需要阅读整篇文章. 1.确定T ...
- Android 动画具体解释Frame动画 (Drawable Animation)
Frame动画像gif画画,通过一些静态的图片,以实现动画效果. Android sdk该AnimationDrawable就是专门针对Frame动画,当然Frame动画也可在java代码或者xml中 ...
- .NET Core 中使用 Humanizer 显示友好时间格式
今天在将一个 .net framework 项目迁移至 .net core 的过程中,在迁移到显示友好时间格式(比如“1分钟前”,“1小时前”)的代码时,找了找看有没有对应的开源库,结果找到了 Hum ...
- StaticResource和DynamicResource
Resource 资源(Resource)是保存在可执行文件中的一种不可执行数据,用来保存一些可以被重复利用的样式,对象定义以及一些传统的资源如二进制数据,图片等等我们可以在任何元素上定义资源 Sta ...
- 高性能mysql笔记 第一章 mysql架构
1.1 mysql逻辑结构 第一层: 负责连接处理,授权认证,安全等事情 第二层:负责mysql的大部分核心功能 ,查询解析,分析,优化,缓存和所有的内置函数,所有跨存储引擎的功能都在这一层实现,, ...
- 读BeautifulSoup官方文档之html树的打印
prettify()能返回一个格式良好的html的Unicode字符串 : markup = '<a href="http://example.com/">I link ...
- wpf窗体定位
原文:wpf窗体定位 据WPF外包小编了解,通常,不需要在屏幕上明确定位窗口.而是简单地将WindowState属性设置为Normal,并忽略其他所有细节.另一方面,很少会将WindowStartup ...