Harris角点检测
代码示例一:
#include<opencv2/opencv.hpp>
using namespace cv;
int main(){
Mat src = imread();
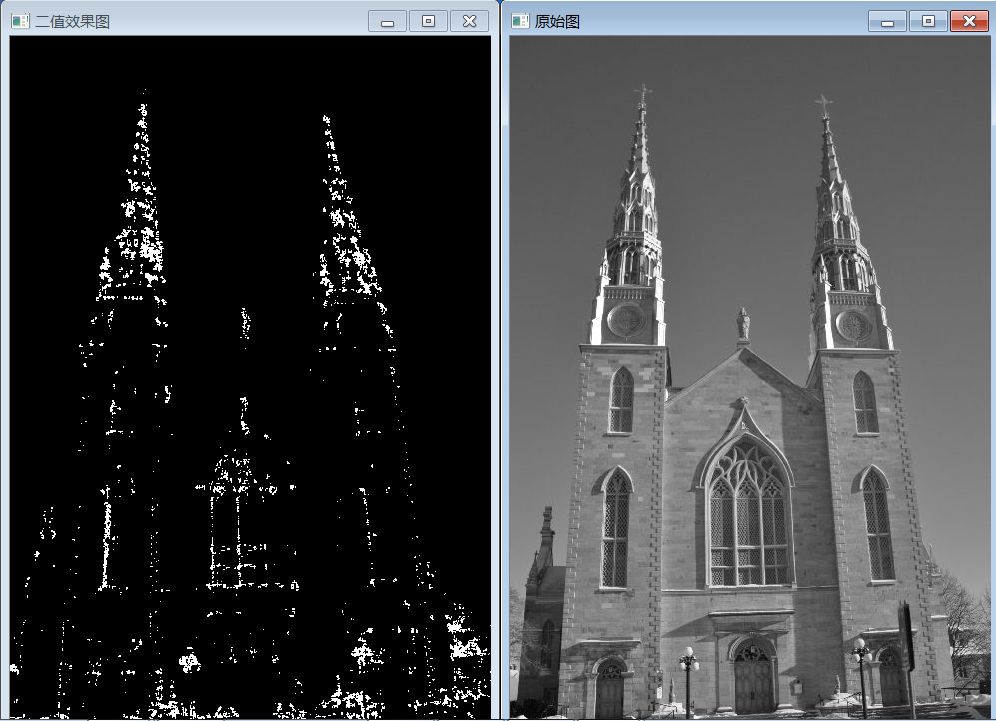
imshow("原始图", src);
//进行Harris角点检测找出角点
Mat cornerStrength;
cornerHarris(src, cornerStrength, , , 0.01);
//对灰度图进行阈值操作,得到二值图并显示
Mat harrisCorner;
threshold(cornerStrength, harrisCorner, , THRESH_BINARY);
imshow("二值效果图",harrisCorner);
waitKey();
;
}
效果:
代码示例二:
#include<opencv2/opencv.hpp>
using namespace cv;
#define WINDOW_NAME1 "窗口1"
#define WINDOW_NAME2 "窗口2"
Mat src,srcClone,gray;
;
;
//函数声明
void onCornerHarris(int, void*);//回调函数
int main(){
src = imread();
imshow("原始图", src);
srcClone = src.clone();
cvtColor(srcClone, gray, COLOR_BGR2GRAY);
//创建窗口和滚动条
namedWindow(WINDOW_NAME1, WINDOW_AUTOSIZE);
createTrackbar("阈值:", WINDOW_NAME1, &thresh, max_thresh, onCornerHarris);
//调用一次回调函数进行初始化
onCornerHarris(, );
waitKey();
;
}
void onCornerHarris(int, void*){
Mat dstImage;//目标图
Mat normImage;//归一化后的图
Mat scaledImage;//线性变换后的8位无符号整形图
//初始化
dstImage = Mat::zeros(src.size(), CV_32FC1);
srcClone = src.clone();
//进行角点检测
cornerHarris(gray, dstImage, , , 0.04, BORDER_DEFAULT);
//归一化与转换
normalize(dstImage, normImage, , , NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(normImage, scaledImage);
//绘制:将检测到的,符合阈值条件的角点绘制出来
; j < normImage.rows; j++){
; i < normImage.cols; i++){
){
circle(srcClone, Point(i, j), , Scalar(, , ), , , );
circle(scaledImage, Point(i, j), , Scalar(, , ), , , );
}
}
}
imshow(WINDOW_NAME1, srcClone);
imshow(WINDOW_NAME2, scaledImage);
}
效果:

代码示例三:
#include<opencv2/opencv.hpp>
using namespace cv;
#include<vector>
using namespace std;
class HarrisDetector{
private:
//表示角点强度的32位浮点图像
Mat cornerStrength;
//阈值化后的32位浮点图像
Mat cornerTh;
//局部极大值图像(内部)
Mat localMax;
//导数平滑的相邻像素的尺寸
int neighbourhood;
//梯度计算的孔径大小
int aperture;
//Harris参数
double k;
//harris计算的最大强度
double maxStrength;
//计算得到的阈值(内部)
double threshold;
//非极大值抑制的相邻像素的尺寸
int nonMaxSize;
//非极大值抑制的核
Mat kernel;
public:
HarrisDetector() :neighbourhood(), aperture(),
k(0.01), maxStrength(0.0),
threshold(){
//创建非极大值抑制的核
}
void detect(const Mat& image){
//harris计算
cornerHarris(image, cornerStrength, neighbourhood, aperture, k);
//内部阈值计算
double minStrength;//未使用
minMaxLoc(cornerStrength, &minStrength, &maxStrength);
//局部极大值检测
Mat dilated;//临时图像
dilate(cornerStrength, dilated, Mat());
compare(cornerStrength, dilated, localMax, CMP_EQ);
}
Mat getCornerMap(double qualityLevel){
Mat cornerMap;
//对角点图像进行阈值化
this->threshold = qualityLevel*maxStrength;
cv::threshold(cornerStrength, cornerTh, threshold, , THRESH_BINARY);
//转换为8位图像
cornerTh.convertTo(cornerMap,CV_8U);
//非极大值抑制
bitwise_and(cornerMap, localMax, cornerMap);
return cornerMap;
}
void getCorners(vector<cv::Point>& points,double qualityLevel){
//得到角点图
cv::Mat cornerMap = getCornerMap(qualityLevel);
getCorners(points, cornerMap);
}
void getCorners(vector<cv::Point>& points, const Mat& cornerMap){
//遍历像素得到所有特征
; y < cornerMap.rows; y++){
const uchar* rowPtr = cornerMap.ptr <uchar>(y);
; x < cornerMap.cols; x++){
//如果是特征点
if (rowPtr[x]){
points.push_back(cv::Point(x, y));
}
}
}
}
//在特征点的位置绘制圆
,,), , ){
vector<cv::Point>::const_iterator it = points.begin();
while (it != points.end()){
cv::circle(image, *it, radius, color, thickness);
++it;
}
}
};
int main(){
Mat src = imread();
//HarrisDetector类使用方式
HarrisDetector harris;
harris.detect(src);
std::vector<cv::Point> pts;
harris.getCorners(pts, 0.1);
harris.drawOnImage(src, pts);
imshow("result", src);
waitKey();
}
效果:

Harris角点检测的更多相关文章
- Harris角点检测算法优化
Harris角点检测算法优化 一.综述 用 Harris 算法进行检测,有三点不足:(1 )该算法不具有尺度不变性:(2 )该算法提取的角点是像素级的:(3 )该算法检测时间不是很令人满意. 基于以上 ...
- Harris 角点检测
一 .Motivation 对于做图像处理的人来说,Harris角点检测肯定听过,1988年发表的文章"A combined corner and edge detector"描述 ...
- Harris角点检测算原理
主要参考了:http://blog.csdn.net/yudingjun0611/article/details/7991601 Harris角点检测算子 本文将该文拷贝了过来,并做了一些数学方面的 ...
- Harris角点检测原理分析
看到一篇从数学意义上讲解Harris角点检测很透彻的文章,转载自:http://blog.csdn.net/newthinker_wei/article/details/45603583 主要参考了: ...
- cv2.cornerHarris()详解 python+OpenCV 中的 Harris 角点检测
参考文献----------OpenCV-Python-Toturial-中文版.pdf 参考博客----------http://www.bubuko.com/infodetail-2498014. ...
- Opencv学习笔记------Harris角点检测
image算法测试iteratoralgorithmfeatures 原创文章,转载请注明出处:http://blog.csdn.net/crzy_sparrow/article/details/73 ...
- harris角点检测的简要总结
目录 1. 概述相关 2. 原理详解 1) 算法思想 2) 数学模型 3) 优化推导 3. 具体实现 1) 详细步骤 2) 最终实现 4. 参考文献 1. 概述相关 harris角点检测是一种特征提取 ...
- OpenCV-Python:Harris角点检测与Shi-Tomasi角点检测
一.Harris角点检测 原理: 角点特性:向任何方向移动变换都很大. Chris_Harris 和 Mike_Stephens 早在 1988 年的文章<A CombinedCorner an ...
- 第十一节、Harris角点检测原理(附源码)
OpenCV可以检测图像的主要特征,然后提取这些特征.使其成为图像描述符,这类似于人的眼睛和大脑.这些图像特征可作为图像搜索的数据库.此外,人们可以利用这些关键点将图像拼接起来,组成一个更大的图像,比 ...
随机推荐
- SIFT定位算法关键步骤的说明
1. SIFT算法中一些符号的说明 $I(x,y)$表示原图像. $G(x,y,\sigma)$表示高斯滤波器,其中$G(x,y,\sigma) = \frac{1}{2\pi\sigma^2}exp ...
- SQL2005:SQL Server 2005还原数据库时出现“不能选择文件或文件组XXX_log用于此操作的解决办法
SQL2005 还原数据库失败,提示如下: SQL Server 2005还原数据库时出现“不能选择文件或文件组XXX_log用于此操作的解决办法 出现错误时操作步骤为:右击数据库--->任务- ...
- 【1】第一次电话面试---上海EMC
时间是2016//11月,投的是上海的EMC2公司的JavaWeb开发岗,第一次接到的电话面试,问的题目很基础基础,很遗憾,本人在掌握的太不好,回答的很乱,目测定挂.下面记下HR问的问题及回答. 首先 ...
- poj 2513 Colored Sticks trie树+欧拉图+并查集
点击打开链接 Colored Sticks Time Limit: 5000MS Memory Limit: 128000K Total Submissions: 27955 Accepted ...
- NGUI之UIRoot
原文:http://www.tasharen.com/forum/index.php?topic=6710.0 概述 UIRoot总是放在NGUI UI层级的最上层. 它用来使UI的缩放变得更容易.w ...
- React 附件动画API ReactCSSTransitionGroup
React为动画提供了一个附加组件ReactTransitionGroup,这个附加组件是动画的底层API,并且还提供了一个附件组件ReactCSSTransitionGroup,ReactCSSTr ...
- MVC4.0中项目发布遇到IE11时session存入URL中,导致记不住密码的问题
///MVC4.0中项目发布遇到IE11时session存入URL中,导致记不住密码的问题,在webconfig中配置<system.web><authentication mode ...
- Libevent库 编译与使用
Libevent官网:http://libevent.org/ windows 7下编译: 编译环境: windows 7 + VS2010 (1)解压libevent到F:\libevent\lib ...
- The first day!!!
我的小院子开通啦,开始记录自己的学习历程,加油!!!
- avalon2学习教程09循环操作
avalon2的循环指令的用法完全改变了.avalon最早期从knockout那样抄来ms-each,ms-with,分别用于数组循环与对象循环.它们都是针对元素内容进行循环.后来又从angular那 ...