玩了下opencv的aruco(python版)
简单的玩了下opencv里头的aruco,用的手机相机,手机装了个 ip摄像头,这样视频就可以传到电脑上了。

首先是标定,我没打印chessboard,直接在电脑屏幕上显示,拍了17张,大概如下:
又在手机上装了个 尺子 之类的app,比划着量了下,每个格子大概是18.1 mm,这个棋盘是10 x 7的棋盘。
要pip install opencv-contrib-python才有扩展模块,扩展模块中包含aruco
然后标定了一下:
import cv2
import numpy as np
import glob
import matplotlib.pyplot as plt
import matplotlib.patches as patches # 找棋盘格角点 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) # 阈值
#棋盘格模板规格
w = 9 # 10 - 1
h = 6 # 7 - 1
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵
objp = np.zeros((w*h,3), np.float32)
objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
objp = objp*18.1 # 18.1 mm # 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点 images = glob.glob('./chessboard/*.jpg') # 拍摄的十几张棋盘图片所在目录 i = 1
for fname in images: img = cv2.imread(fname)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 找到棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, (w,h),None)
# 如果找到足够点对,将其存储起来
if ret == True:
print("i:", i)
i = i+1 cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria)
objpoints.append(objp)
imgpoints.append(corners)
# 将角点在图像上显示
cv2.drawChessboardCorners(img, (w,h), corners, ret)
cv2.namedWindow('findCorners', cv2.WINDOW_NORMAL)
cv2.resizeWindow('findCorners', 810, 405)
cv2.imshow('findCorners',img)
cv2.waitKey(1)
cv2.destroyAllWindows()
#%% 标定
ret, mtx, dist, rvecs, tvecs = \
cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) print("ret:",ret )
print("mtx:\n",mtx) # 内参数矩阵
print("dist:\n",dist ) # 畸变系数 distortion cofficients = (k_1,k_2,p_1,p_2,k_3)
print("rvecs:\n",rvecs) # 旋转向量 # 外参数
print("tvecs:\n",tvecs ) # 平移向量 # 外参数
标定结果里对aruco有用的是 mtx 和 dist。
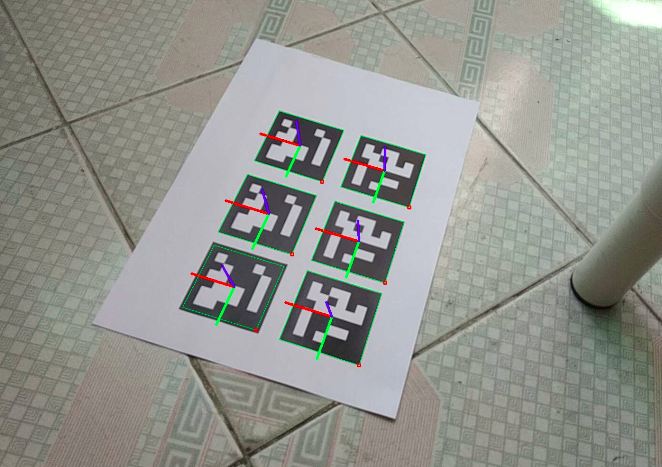
然后打印包含aruco的marker的纸,运行下面的代码就可以玩了:
import numpy as np
import time
import cv2
import cv2.aruco as aruco #with np.load('webcam_calibration_output.npz') as X:
# mtx, dist, _, _ = [X[i] for i in ('mtx','dist','rvecs','tvecs')] #mtx =
#2946.48 0 1980.53
#0 2945.41 1129.25
#0 0 1 mtx = np.array([
[2946.48, 0, 1980.53],
[ 0, 2945.41, 1129.25],
[ 0, 0, 1],
])
#我的手机拍棋盘的时候图片大小是 4000 x 2250
#ip摄像头拍视频的时候设置的是 1920 x 1080,长宽比是一样的,
#ip摄像头设置分辨率的时候注意一下 dist = np.array( [0.226317, -1.21478, 0.00170689, -0.000334551, 1.9892] ) video = "http://admin:admin@192.168.1.2:8081/" # 手机ip摄像头
# 根据ip摄像头在你手机上生成的ip地址更改,右上角可修改图像分辨率 cap = cv2.VideoCapture(video) font = cv2.FONT_HERSHEY_SIMPLEX #font for displaying text (below) #num = 0
while True:
ret, frame = cap.read()
# operations on the frame come here gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
aruco_dict = aruco.Dictionary_get(aruco.DICT_6X6_250)
parameters = aruco.DetectorParameters_create() '''
detectMarkers(...)
detectMarkers(image, dictionary[, corners[, ids[, parameters[, rejectedI
mgPoints]]]]) -> corners, ids, rejectedImgPoints
''' #lists of ids and the corners beloning to each id
corners, ids, rejectedImgPoints = aruco.detectMarkers(gray,
aruco_dict,
parameters=parameters) # if ids != None:
if ids is not None: rvec, tvec, _ = aruco.estimatePoseSingleMarkers(corners, 0.05, mtx, dist)
# Estimate pose of each marker and return the values rvet and tvec---different
# from camera coeficcients
(rvec-tvec).any() # get rid of that nasty numpy value array error # aruco.drawAxis(frame, mtx, dist, rvec, tvec, 0.1) #Draw Axis
# aruco.drawDetectedMarkers(frame, corners) #Draw A square around the markers for i in range(rvec.shape[0]):
aruco.drawAxis(frame, mtx, dist, rvec[i, :, :], tvec[i, :, :], 0.03)
aruco.drawDetectedMarkers(frame, corners)
###### DRAW ID #####
# cv2.putText(frame, "Id: " + str(ids), (0,64), font, 1, (0,255,0),2,cv2.LINE_AA) else:
##### DRAW "NO IDS" #####
cv2.putText(frame, "No Ids", (0,64), font, 1, (0,255,0),2,cv2.LINE_AA) # Display the resulting frame
cv2.imshow("frame",frame) key = cv2.waitKey(1) if key == 27: # 按esc键退出
print('esc break...')
cap.release()
cv2.destroyAllWindows()
break if key == ord(' '): # 按空格键保存
# num = num + 1
# filename = "frames_%s.jpg" % num # 保存一张图像
filename = str(time.time())[:10] + ".jpg"
cv2.imwrite(filename, frame)
最后效果如下:
玩了下opencv的aruco(python版)的更多相关文章
- OpenCV计算机视觉实战(Python版)资源
疲劳检测 pan.baidu.com/s/1Ng_-utB8BSrXlgVelc8ovw #导入工具包 from scipy.spatial import distance as dist from ...
- Python下opencv使用笔记(一)(图像简单读取、显示与储存)
写在之前 从去年開始关注python这个软件,途中间间断断看与学过一些关于python的东西.感觉python确实是一个简单优美.easy上手的脚本编程语言,众多的第三方库使得python异常的强大. ...
- Ubuntu下OpenCV不能被某个python版本识别
Ubuntu下OpenCV不能被某个python版本识别 Solution: 可以进入相应版本的python,查看该python的path: python import sys print(sys.p ...
- 学习笔记24—win10环境下python版libsvm的安装
1.前言 由于毕业设计需要用到libsvm,所以最近专心于配置libsvm,曾经尝试过在matlab中安装,但是没有成功.最终在Python环境中完成安装. 2.LIBSVM介绍 LIBSVM 是台湾 ...
- Python下opencv使用笔记(图像频域滤波与傅里叶变换)
Python下opencv使用笔记(图像频域滤波与傅里叶变换) 转载一只程序喵 最后发布于2018-04-06 19:07:26 阅读数 1654 收藏 展开 本文转载自 https://blog ...
- [No000054] Windows 下Python3.5, NoteBook增强版安装
接着上周继续,没看的童鞋.请移步: http://www.cnblogs.com/Chary/p/No00004B.html 这里,假设你已经能够看到这个画面了: 接下来,我们继续 给药 : 安装no ...
- 自己动手实现智能家居之树莓派GPIO简介(Python版)
[前言] 一个热爱技术的人一定向往有一个科技感十足的环境吧,那何不亲自实践一下属于技术人的座右铭:“技术改变世界”. 就让我们一步步动手搭建一个属于自己的“智能家居平台”吧(不要对这个名词抬杠啦,技术 ...
- 【原】Learning Spark (Python版) 学习笔记(三)----工作原理、调优与Spark SQL
周末的任务是更新Learning Spark系列第三篇,以为自己写不完了,但为了改正拖延症,还是得完成给自己定的任务啊 = =.这三章主要讲Spark的运行过程(本地+集群),性能调优以及Spark ...
- 数据结构:顺序表(python版)
顺序表python版的实现(部分功能未实现) #!/usr/bin/env python # -*- coding:utf-8 -*- class SeqList(object): def __ini ...
随机推荐
- Python 多线程的程序不结束多进程的程序不结束的区别
import time from threading import Thread from multiprocessing import Process #守护进程:主进程代码执行运行结束,守护进程随 ...
- mysql 数据库
show databases 显示库use databse 进入库(databse为库名)show tables 显示表create table a select * from b where 0=1 ...
- pagerank 数学基础
网页排序的任务中,最核心的难点在于判别网页质量. 将互联网上的网页模拟为一个节点,而这个网页的“出链”看做是指向其他节点的一条“有向边”,而“入链”则是其他节点指向这个节点的有向边.这样整个网络就变成 ...
- google Kickstart Round F 2017 四道题题解
Problem A. Kicksort 题意抽象一下为: 对于一个每次都从数列正中间取划分数的快速排序,给定一个1-n的排列,问快排的复杂度对于这个排列是否会退化为最坏复杂度. 数据范围: 测试组数1 ...
- autofac使用总结
转摘自:http://niuyi.github.io/blog/2012/04/06/autofac-by-unit-test/ 注册部分: AutoFac是.net平台下的IOC容器产品,它可以管理 ...
- PHP分帧后台模板页面css样式,js引入方法
一,首先把下载好的分帧后台模板放到对应的目录中,HTML显示页面放到View目录中,CSS和JS.img图片等公共资源放到include目录中 二.然后开始准备更改CSS和JS , img路径操作:( ...
- wireshark 无线抓包
1)抓取无线网卡的数据包(类似有线,仅抓取本网卡的数据包,适用与windows,linux) 1. 打开菜单项“Capture”下的子菜单“Capture Options”选项: 2. 找到设置面 ...
- python pip安装其他模块到中途失败问题
当网速很差时,pip安装到中途总是出现一大片红色然后失败.而且往往安装下载很久,失败了就要从新开始,失败如下 就是,当你出现这个错误Could not find a version that sati ...
- myEclipse出现cannot paste the clipboard contents into the selected elements报错
导入jar包报错,cannot paste the clipboard contents into the selected elements,查阅资料让重新打开工程,但依然报错. 最后在本地路径复制 ...
- 在Django中使用ForeignKey()报错问题的解决
在Django2的models中建立一对多的关系使用ForeignKey(): student = models.ForeignKey("Classes") 报错: TypeErr ...