ORB-SLAM2(3) ROS下实时跑ORB_SLAM2
Step1 : 运行内核
roscore
Step2 : 启动相机
cd catkin_ws/src/usb_cam/launch #进入usb_cam驱动的安装目录
roslaunch my_cam.launch
#roslaunch usb_cam usb_cam-test.launch
my_cam.launch文件
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video1" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
- 自己的路径,自己的launch文件名
Step3 : 运行orb_slam2
运行官方的
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
其中包含两个参数:
PATH_TO_VOCABULARY:视觉词典,一般可以直接使用catkin_ws/src/ORB_SLAM2/Vocabulary/ORBvoc.txt
PATH_TO_SETTINGS_FILE:摄像头内参,可以使用路径catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/Asus.yaml,但需要将Asus.yaml中的参数改成自己使用摄像头标定后的参数,摄像头标定可以使用opencv或matlab工具箱。
运行自己的
#如果路径还没配置需要以下两行添加ROS环境
cd /home/hm/catkin_ws/src/ORB_SLAM2 #进入ORB_SLAM2的主目录
#source Examples/ROS/ORB_SLAM2/build/devel/setup.bash
cd Examples/ROS/
rosrun ORB_SLAM2 Mono ../../Vocabulary/ORBvoc.txt ../../my_camera.yaml #自己的相机标定文件
my_camera.yaml #自己的相机标定文件
image_width: 640
image_height: 480
camera_name: head_camera
camera_matrix:
rows: 3
cols: 3
data: [684.9063320280035, 0, 333.8552962590653, 0, 685.8214305739915, 258.3133970146105, 0, 0, 1]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [0.08540487526140211, -0.4947463318653558, 0.002070145615834643, 1.739354152579926e-05, 0]
rectification_matrix:
rows: 3
cols: 3
data: [1, 0, 0, 0, 1, 0, 0, 0, 1]
projection_matrix:
rows: 3
cols: 4
data: [679.8218383789062, 0, 334.2231118845648, 0, 0, 686.0590209960938, 258.4570282812347, 0, 0, 0, 1, 0]
修改话题
usb_cam默认话题 为usb_cam/image_raw
ros订阅的图像默认为 image/image_raw
进到catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src 打开ros_mono.cc
将subscribe的话题改为/usb_cam/image_raw,将话题接上
ros::Subscriber sub = nodeHandler.subscribe("/usb_cam/image_raw", 1, &ImageGrabber::GrabImage,&igb);

rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
重新编译ROS的example
cd ~/catkin_ws/src/ORB_SLAM2
chmod +x build_ros.sh
./build_ros.sh重新编译工作空间
cd ~/catkin_ws
catkin_make
再来一次:
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
问题:
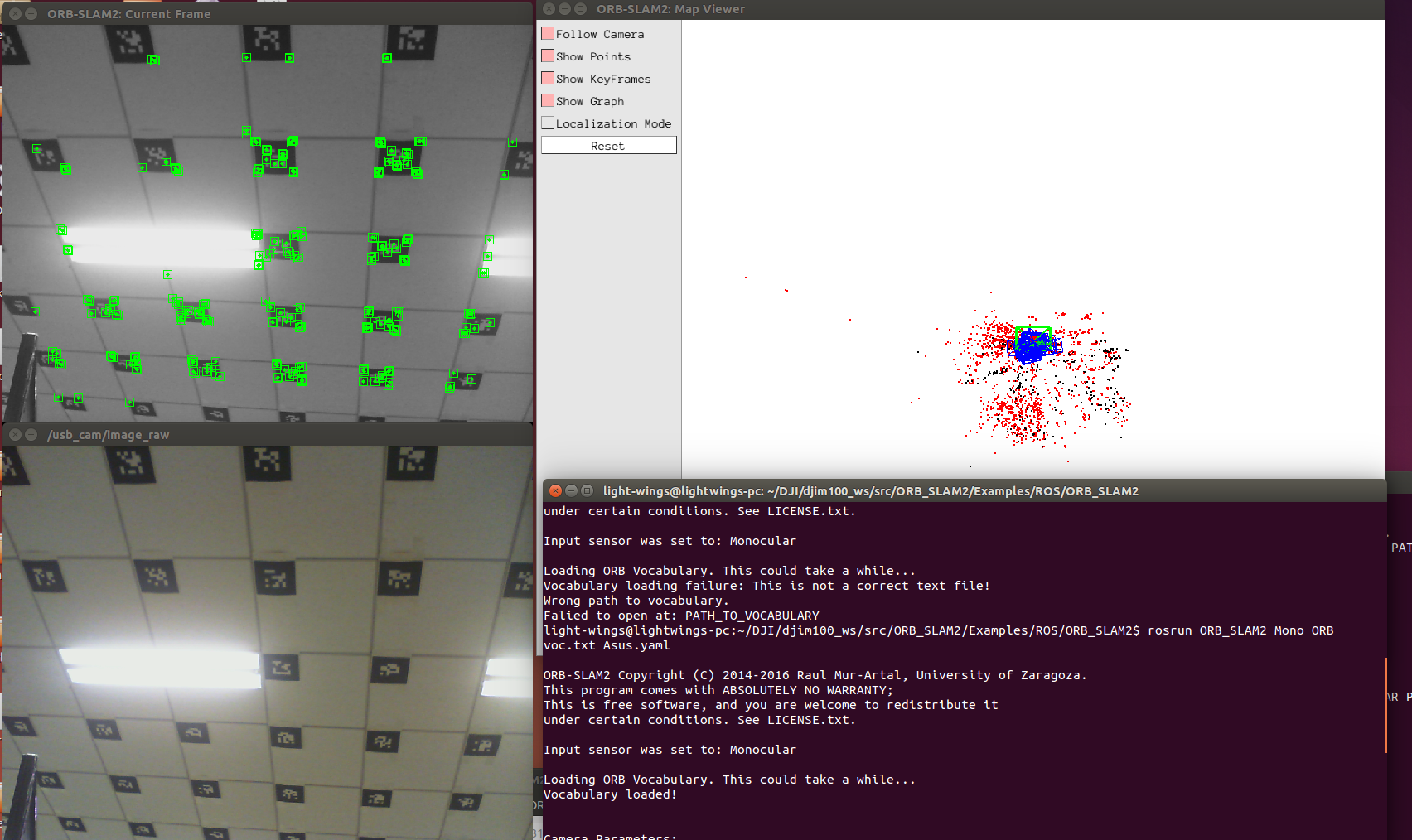
权限问题: 一直提示无法打开参数文件
解决方法: 直接将两个参数文件,复制到同目录下,还不行需要分别给权限
sudo chmod 777 Asus.yaml sudo chmod 777 ORBvoc.txt

最后出图:
ORB-SLAM2(3) ROS下实时跑ORB_SLAM2的更多相关文章
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- LSD-SLAM深入学习(1)-基本介绍与ros下的安装
前言 借鉴来自RGB-D数据处理的两种方法-基于特征与基于整体的,同样可以考虑整个图片的匹配,而不是只考虑特征点的…… 一般这种稠密的方法需要很大的计算量,DTAM: Dense tracking a ...
- ORB-SLAM2(2) ROS下配置和编译
1配置USB相机 1.1网友参考: http://www.liuxiao.org/2016/07/ubuntu-orb-slam2-%E5%9C%A8-ros-%E4%B8%8A%E7%BC%96%E ...
- ORB SLAM2在Ubuntu 16.04上的运行配置
http://www.mamicode.com/info-detail-1773781.html 安装依赖 安装OpenGL 1. 安装opengl Library$sudo apt-get inst ...
- ros下基于百度语音的,语音识别和语音合成
代码地址如下:http://www.demodashi.com/demo/13153.html 概述: 本demo是ros下基于百度语音的,语音识别和语音合成,能够实现文字转语音,语音转文字的功能. ...
- ros下多机器人系统(1)
multi-robot system 经过两个多月的ros学习,对ros的认识有了比较深入的了解,本篇博客主要记录在ros下开发多机器人系统以及对ros更深入的开发.本篇博客是假定读者已经学习完了全部 ...
- Linux 下实时查看日志
Linux 下实时查看日志 cat /var/log/*.log 如果日志在更新,如何实时查看 tail -f /var/log/messages 还可以使用 watch -d -n 1 cat /v ...
- pl-svo在ROS下运行笔记
一.程序更改的思路(参考svo_ros的做法): 1.在ROS下将pl-svo链接成库需要更改相应的CMakeLists.txt文件,添加package.xml文件: 2.注册一个ROS节点使用svo ...
- orb slam2 双目摄像头
主要参考了http://blog.csdn.net/awww797877/article/details/51171099这篇文章,其中需要添加的是:export ROS_PACKAGE_PATH=$ ...
随机推荐
- (转)Visual Studio 2013新功能预览:增代码的透明度和可追溯性
微软打破了Visual Studio两年升级一次的传统,Visual Studio 2012发布还不足一年,微软就计划发布了Visual Studio 2013了.在今天的TechEd大会上,微软宣布 ...
- Web Service 与WebAPI 的区别
Web Servise: web service 是一种跨编程语言和跨操作系统平台的远程调用技术. 所谓跨编程语言和跨操作系统平台,就是说服务器端程序采用Java编写,客户端程序则可以采用其他编程语言 ...
- ModBus通信协议的【传输方式】
1.Modbus 传输方式 标准的Modbus口是使用一RS-232C兼容串行接口,它定义了连接口的针脚.电缆.信号位.传输波特率.奇偶校验.控制器能直接或经由Modem组网. 控制器通信使用 ...
- 【Spring】1、Spring 中的监听器 Listener
一.接口 1.EventListener 2.HttpSessionAttributeListener 继承EventListener接口 HttpSessionAttributeListener ...
- Java开发中json使用,各对象与json相互转换
Json:一种网络通信使用的数据格式,因为便于解析,比较流行,对象可以转为json,同样json也可以转对象. 下面介绍下Json工具的简单使用(fastjson && jackson ...
- springMVC 拦截器源码解析
前言:这两天学习了代理模式,自然想到了 springmvc 的 aop 使用的就是动态代理,拦截器使用的就是 jdk 的动态代理.今天看了看源码,记录一下.转载请注明出处:https://www.cn ...
- Manjaro使用笔记-使用中国源的方法
我的邮箱地址:zytrenren@163.com欢迎大家交流学习纠错!生成可用中国镜像站列表: sudo pacman-mirrors -i -c China -m rank 勾选弹窗里面的所有源刷新 ...
- CSS图片两端对齐,自适应列表布局末行对齐修复实例页面
写在前面 前端开发,图片两端对齐,是十分常见的,也是十分痛苦的,我试过好多方法,通过整理,认为下面还是比较靠谱的,在实践中大家可以试试,欢迎一起学习,一起进步 HTML代码 HTML代码非常简单,用的 ...
- Linux profile1,bashrc,.bash_profile,.bash_login,.profile,.bashrc,.bash_logout浅析 Part1
profile,bashrc,.bash_profile,.bash_login,.profile,.bashrc,.bash_logout浅析 Part 1 by:授客 QQ:103355312 ...
- Android根据图片Uri获取图片path绝对路径的几种方法【转】
在Android 编程中经常会用到Uri转化为文件路径,如我们从相册选择图片上传至服务器,一般上传前需要对图片进行压缩,这时候就要用到图片的绝对路径. 下面对我开发中uri转path路径遇到的问题进行 ...