2.5 USB摄像头驱动程序框架
学习目标:根据vivi驱动架构和linux-2.6.31/linux-2.6.31.14/drivers/media/video/uvc/Uvc_driver.c驱动源码,分析usb摄像头驱动程序框架;
一、摄像头拓扑结构
由数据手册USB_Video_Example 1.5和UVC 1.5 Class specification分析摄像头的拓扑结构,如下图所示:
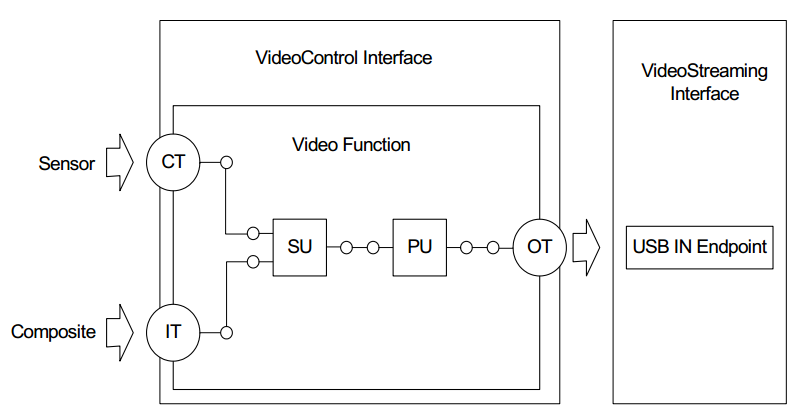
usb摄像头功能由摄像头接口完成,每个摄像头功能包括一个 VideoControl interface (VC)和几个VideoStreaming interface (VS)。
1) CS主要用于控制,它又抽象出两个概念:unit和termiral。unit用于里面的相关控制。termiral用于内外连接。其中,unit中包括:a. Selector Unit (SU) 选择(CT (Camera Terminal) 和IT(Input Terminal))哪一路 。b. Processing Unit (PU) 用于亮度等属性参数控制。
2) VS用于传输,来读视频数据,。需要设置类型type和格式format,选择实时传输还是批量传输Bulk。
二、usb摄像头源码框架分析
在Linux内核里自带usb摄像头驱动程序,它支持uvc规格的摄像头(uvc即usb video class),进入源码程序分析。
1、进入uvc_init入口函数
--> result = usb_register(&uvc_driver.driver);
struct uvc_driver uvc_driver = {
.driver = {
.name = "uvcvideo",
.probe = uvc_probe,
.disconnect = uvc_disconnect,
.suspend = uvc_suspend,
.resume = uvc_resume,
.reset_resume = uvc_reset_resume,
.id_table = uvc_ids,
.supports_autosuspend = ,
},
};
注册了 uvc_driver结构体,根据.id_table匹配后,进入uvc_probe函数:
uvc_register_video(dev)
-->vdev = video_device_alloc();
vdev->fops = &uvc_fops;
vdev->release = video_device_release;
video_register_device(vdev, VFL_TYPE_GRABBER, -1)
const struct v4l2_file_operations uvc_fops = {
.owner = THIS_MODULE,
.open = uvc_v4l2_open,
.release = uvc_v4l2_release,
.ioctl = uvc_v4l2_ioctl,
.read = uvc_v4l2_read,
.mmap = uvc_v4l2_mmap,
.poll = uvc_v4l2_poll,
};
由此可知,写一个USB摄像头驱动程序需要以下步骤:
1)构造一个usb_driver结构体(uvc结构体)
2)设置
probe:
2.1. 分配video_device:video_device_alloc
2.2. 设置
.fops
.ioctl_ops (里面需要设置11项)
如果要用内核提供的缓冲区操作函数,还需要构造一个videobuf_queue_ops
2.3. 注册: video_register_device
id_table: 表示支持哪些USB设备
3)注册: usb_register
2、分析UVC驱动调用过程
const struct v4l2_file_operations uvc_fops = {
.owner = THIS_MODULE,
.open = uvc_v4l2_open,
.release = uvc_v4l2_release,
.ioctl = uvc_v4l2_ioctl,
.read = uvc_v4l2_read,
.mmap = uvc_v4l2_mmap,
.poll = uvc_v4l2_poll,
};
1) open函数
uvc_v4l2_open //一系列设置
2) uvc_v4l2_ioctl函数
-->video_usercopy(file, cmd, arg, uvc_v4l2_do_ioctl);//将用户提供的参数拷贝到内核态,并调用uvc_v4l2_do_ioctl函数
-->uvc_v4l2_do_ioctl
struct video_device *vdev = video_devdata(file);//根据次设备号,找到video_device
switch (cmd) { //根据cmd执行一系列的ioctl函数
/* Query capabilities */
case VIDIOC_QUERYCAP:
.......
接下来具体分析ioctl过程:
1)VIDIOC_QUERYCAP
if (video->streaming->type == V4L2_BUF_TYPE_VIDEO_CAPTURE)
cap->capabilities = V4L2_CAP_VIDEO_CAPTURE
| V4L2_CAP_STREAMING;
else
cap->capabilities = V4L2_CAP_VIDEO_OUTPUT
| V4L2_CAP_STREAMING;
break;
// video->streaming->type 应该是在设备被枚举时分析描述符时设置的。(对用功能拓扑的VS)
2)VIDIOC_ENUM_FMT // format数组应是在设备被枚举时设置的
format = &video->streaming->format[fmt->index];
3)VIDIOC_G_FMT
--> uvc_v4l2_get_format(video, arg); // USB摄像头支持多种格式fromat, 每种格式下有多种frame(比如分辨率)
struct uvc_format *format = video->streaming->cur_format;
struct uvc_frame *frame = video->streaming->cur_frame;
4)VIDIOC_TRY_FMT
-->uvc_v4l2_try_format(video, arg, &probe, NULL, NULL);
/* Check if the hardware supports the requested format. */
/* Find the closest image size.*/找到最接近的图像格式
5)VIDIOC_S_FMT // 只是把参数保存起来,还没有发给USB摄像头
-->uvc_v4l2_set_format(video, arg);
uvc_v4l2_try_format(video, fmt, &probe, &format, &frame);
memcpy(&video->streaming->ctrl, &probe, sizeof probe);
video->streaming->cur_format = format;
video->streaming->cur_frame = frame;
6)VIDIOC_REQBUFS
-->uvc_alloc_buffers(&video->queue, rb->count, bufsize);
unsigned int bufsize = video->streaming->ctrl.dwMaxVideoFrameSize; //bufsize已经设置并获取,vmalloc时只需传进来应用程序的rb->count数值
/* 根据rb->count来分配多少个buf*/
for (; nbuffers > 0; --nbuffers) {
mem = vmalloc_32(nbuffers * bufsize);
if (mem != NULL)
break;
}
7)VIDIOC_QUERYBUF
-->uvc_query_buffer(&video->queue, buf);
__uvc_query_buffer
memcpy(v4l2_buf, &buf->buf, sizeof *v4l2_buf); // 复制参数
8)mmap //查询buf参数后使用mmap把buf映射给应用程序
uvc_v4l2_mmap
9)VIDIOC_QBUF
-->uvc_queue_buffer(&video->queue, arg);
list_add_tail(&buf->stream, &queue->mainqueue);
list_add_tail(&buf->queue, &queue->irqqueue);
10)VIDIOC_STREAMON
-->uvc_video_enable(video, 1) // 把所设置的参数发给硬件,然后启动摄像头
/* Commit the streaming parameters. /* 传输
uvc_commit_video(video, &video->streaming->ctrl) //*在前面VIDIOC_S_FMT赋值的video->streaming->ctrl
-->uvc_set_video_ctrl(video, probe, 0);///* 设置格式fromat, frame */
ret = __uvc_query_ctrl(video->dev,/* 哪一个USB设备 */ SET_CUR, 0, video->streaming->intfnum, /* 哪一个接口: VS */
probe ? VS_PROBE_CONTROL : VS_COMMIT_CONTROL, data, size,
uvc_timeout_param);
注意:此处用到了__uvc_query_ctrl函数
/* *启动 Initialize isochronous/bulk URBs and allocate transfer buffers. */
uvc_init_video(video, GFP_KERNEL);
uvc_init_video_isoc(video, ep, gfp_flags);(实时传输)/uvc_init_video_bulk(video, ep, gfp_flags)(批量传输)
-->usb_alloc_urb
设置urb结构体(urb用于usb数据传输的结构体)
urb->complete = uvc_video_complete;(收到数据后此函数被调用,它又调用video->decode(urb, video, buf); ==>uvc_video_decode_isoc/uvc_video_encode_bulk => uvc_queue_next_buffer => wake_up(&buf->wait);)
-->usb_submit_urb(video->urb[i], gfp_flags)) ; /* Submit the URBs. */
11) poll
--> uvc_v4l2_poll
uvc_queue_poll
poll_wait(file, &buf->wait, wait); // 休眠等待有数据
12) VIDIOC_DQBUF //有数据时,把buf从队列中取出,并从原始队列里面删除
--> uvc_dequeue_buffer(&video->queue, arg, file->f_flags & O_NONBLOCK);
list_del(&buf->stream);
13)VIDIOC_STREAMOFF
uvc_video_enable(video, 0); //0表示关闭
uvc_uninit_video(video, 1);
--> usb_kill_urb(urb);
usb_free_urb(urb);
-----以上均涉及到VS(Video Streaming Interface)接口的操作,不涉及Video Control Interface-----
下面以设置亮度过程为例,操作VC(Video Control Interface)接口(实质上是向VC发包):
ioctl: VIDIOC_S_CTRL
--->uvc_ctrl_set(video, &xctrl);//设置
uvc_ctrl_commit(video); //传送
__uvc_ctrl_commit(video, 0);
uvc_ctrl_commit_entity(video->dev, entity, rollback);
ret = uvc_query_ctrl(dev /* 哪一个USB设备 */, SET_CUR, ctrl->entity->id /* 哪一个unit/terminal */,
dev->intfnum /* 哪一个接口: VC interface */, ctrl->info->selector,
uvc_ctrl_data(ctrl, UVC_CTRL_DATA_CURRENT),ctrl->info->size);
三、总结
1. UVC设备是基于2个interface: VideoControl Interface VC, VideoStreaming Interface VS 进行操作的;
2. 1) VC 用于控制属性参数,比如设置亮度。它内部有多个Unit/Terminal(在程序里Unit/Terminal都称为entity)
可以通过类似的函数来访问:
ret = uvc_query_ctrl(dev /* 哪一个USB设备 */, SET_CUR, ctrl->entity->id /* 哪一个unit/terminal */,
dev->intfnum /* 哪一个接口: VC interface */, ctrl->info->selector,
uvc_ctrl_data(ctrl, UVC_CTRL_DATA_CURRENT),
ctrl->info->size);
2) VS用于获得视频数据,也可以用来选择fromat/frame(VS可能有多种format, 一个format支持多种frame, frame用来表示分辨率等信息)
可以通过类似的函数来访问:
ret = __uvc_query_ctrl(video->dev /* 哪一个USB设备 */, SET_CUR, 0,
video->streaming->intfnum /* 哪一个接口: VS */,
probe ? VS_PROBE_CONTROL : VS_COMMIT_CONTROL, data, size,
uvc_timeout_param);
3. 设置FORMAT时只是简单的使用video->streaming->format[fmt->index]等数据,这些数据应是设备被枚举时设置的,也就是分析它的描述符时设置的。
4. UVC驱动的重点在于: usb摄像头描述符的分析
属性的控制: 通过VideoControl Interface(VC)来设置
格式的选择:通过VideoStreaming Interface(VS)来设置
数据的获得:通过VideoStreaming Interface(VS)的URB-->(usb设备驱动数据传输的结构体格式)来获得。
参考:百问网(韦东山视频)
2.5 USB摄像头驱动程序框架的更多相关文章
- USB摄像头驱动框架分析
usb摄像头驱动程序,里面涉及硬件的操作.比如说,想设置亮度的时候,需要把亮度的参数发给硬件.去得到真正视频数据的时候,需要访问硬件得到数据.usb摄像头驱动程序框架与虚拟摄像头驱动程序的框架是一样的 ...
- USB摄像头驱动框架分析(五)
一.USB摄像头驱动框架如下所示:1.构造一个usb_driver2.设置 probe: 2.1. 分配video_device:video_device_alloc ...
- Linux驱动之USB总线驱动程序框架简析
通用串行总线(USB)是主机和外围设备之间的一种连接.USB总线规范有1.1版和2.0版,当然现在已经有了3.0版本.USB1.1支持两种传输速度:低速为1.5Mbps,高速为12Mbps.USB2. ...
- 25、写一个USB摄像头驱动程序(有ioctrl分析)
videobuf2-core.h中的vb2_buffer,记录了v4l2_buffer ,驱动可以对vb2_buffer的v4l2_buffer进行操控, vb2_buffer是v4l2框架层的代码, ...
- Linux USB摄像头驱动【转】
本文转载自:http://www.itdadao.com/articles/c15a509940p0.html 在 cortex-a8 中,可接入摄像头的接口通常可以分为两种, CAMERA 接口和 ...
- USB设备驱动程序学习笔记(一)
现象:把USB设备接到PC1. 右下角弹出"发现android phone"2. 跳出一个对话框,提示你安装驱动程序 问1. 既然还没有"驱动程序",为何能知道 ...
- Linux USB 摄像头驱动
在 cortex-a8 中,可接入摄像头的接口通常可以分为两种, CAMERA 接口和 USB 接口的摄像头.这一章主要是介绍 USB 摄像头的设备驱动程序.在我们印象中,驱动程序都是一个萝卜一个坑, ...
- 12、USB设备驱动程序
linux-3.4.2\driver\hid\usbhid\usbmouse.c 内核只带USB驱动程序 (hub和usb是两个不同的设备,hub在内核上电的过程中在usb_hub_init函数中调用 ...
- Linux笔记(固定USB摄像头硬件端口,绑定前后置摄像头)
在Android的系统会有前置摄像头和后置摄像头的定义,摄像头分为SOC类型的摄像头和USB这一类的摄像头,接下要分析就是USB摄像头这一类 . 一般在android或者linux系统中分析一个模块, ...
随机推荐
- 构建微软智能云:介绍新的Azure业务转型创新技术
在我和用户的交流中发现,在任何类型和规模的组织中,每当涉及到在云中实现商业价值的最大化并取得竞争优势的时候,就会明显呈现三个趋势.首先,应用程序促进着组织更快速实现价值.同时,诸如机器学习.数据预测分 ...
- java笔记--BigDecimal的使用
BigDecimal的运用 --如果朋友您想转载本文章请注明转载地址"http://www.cnblogs.com/XHJT/p/3877231.html "谢谢-- BigDec ...
- java字节码文件指令集
网上找的没有指令码这列 自己把它加上 更方便查阅 指令从0x00-0xc9 没有0xba 常量入栈指令 指令码 操作码(助记符) 操作数 描述(栈指操作数栈) 0x01 aconst_null nu ...
- vSan中见证组件witness详解
witness在vSan中作为见证组件其作用类似于WinServer中的仲裁磁盘,当Cluster中某一节点发生故障时,来判断该节点上的对象在哪一个新的节点上继续承载.此处需要强调的是,witness ...
- 7 Dockerfile指令详解 && VOLUME 指令
格式为: VOLUME ["<路径1>", "<路径2>"...] VOLUME <路径> 之前我们说过,容器运行时应该尽量 ...
- 中间人攻击利用框架bettercap测试
0x00前言 上篇提到内网渗透很有趣,这次就从一款新工具说起: bettercap 0x01简介 bettercap可用来实现各种中间人攻击,模块化,便携.易扩展 0x02特点 提到中间人攻击,最知名 ...
- socket端口复用问题一二
实际上,默认的情况下,如果一个网络应用程序的一个套接字 绑定了一个端口( 占用了 8000 ),这时候,别的套接字就无法使用这个端口( 8000 ), 验证例子如下: #include <std ...
- canvas学习笔记1
<!DOCTYPE html> <html> <head lang="en"> <meta charset="UTF-8&quo ...
- BZOJ 1270 雷涛的小猫 dp
题目链接: https://www.lydsy.com/JudgeOnline/problem.php?id=1270 题目大意: 雷涛的小猫雷涛同学非常的有爱心,在他的宿舍里,养着一只因为受伤被救助 ...
- 1085. [SCOI2005]骑士精神【IDA※】
Description 在一个5×5的棋盘上有12个白色的骑士和12个黑色的骑士, 且有一个空位.在任何时候一个骑士都能按照骑 士的走法(它可以走到和它横坐标相差为1,纵坐标相差为2或者横坐标相差为2 ...