AMCL论文及源码解析--参数(持续更新中)
整理内容来自:http://wiki.ros.org/amcl
1、AMCL订阅的节点:
scan (sensor_msgs/LaserScan):激光数据
tf (tf/tfMessage):各种转移矩阵,如laser_scan->base_link;base_link->odom
initialpose (geometry_msgs/PoseWithCovarianceStamped):初始位姿
map (nav_msgs/OccupancyGrid):栅格地图
2、发布的节点:
amcl_pose (geometry_msgs/PoseWithCovarianceStamped):amcl算法估计出来的位姿
particlecloud (geometry_msgs/PoseArray):粒子点云,用于rviz可视化显示
tf (tf/tfMessage):这里发布的是odom->map的转移矩阵,通过base_link->map和base_odom求得的
3、主要参数
(1)全局滤波参数
~min_particles (int, default: 100):最小粒子数
~max_particles (int, default: 5000):最大粒子数
~kld_err (double, default: 0.01)、~kld_z (double, default: 0.99):KLD算法的两个误差评估参数,kdl_err是真实分布和估计分布之间的KL散度最大误差,表征两个分布的接近程度;两个参数选默认值即可
~update_min_d (double, default: 0.2 meters):运动超过0.2米时,更新粒子
~update_min_a (double, default: π/6.0 radians):旋转角度超过30°,更新粒子
~resample_interval (int, default: 2):重采样间隔
~recovery_alpha_slow (double, default: 0.0 (disabled))
~recovery_alpha_fast (double, default: 0.0 (disabled)):机器人被绑架,重新恢复时的粒子最快衰减率(参考Argument_MCL)
~initial_pose_x (double, default: 0.0 meters)
~initial_pose_y (double, default: 0.0 meters)
~initial_pose_a (double, default: 0.0 radians):初始位姿(x,y,theta)
~initial_cov_xx (double, default: 0.5*0.5 meters)
~initial_cov_yy (double, default: 0.5*0.5 meters)
~initial_cov_aa (double, default: (π/12)*(π/12) radian):初始位姿协方差,使粒子均匀围绕初始点
(2)激光模型参数
~laser_min_range (double, default: -1.0):激光最小角度范围
~laser_max_range (double, default: -1.0)
~laser_max_beams (int, default: 30):滤波器观测更新时,最大的激光束间隔
~laser_z_hit (double, default: 0.95):高斯噪声模型参数
~laser_z_short (double, default: 0.1):意外对象(人的干扰)噪声模型,呈指数分布
~laser_z_max (double, default: 0.05):激光失效噪声模型
~laser_z_rand (double, default: 0.05):随机测量噪声模型
~laser_sigma_hit (double, default: 0.2 meters):方差
~laser_lambda_short (double, default: 0.1):意外对象噪声模型的系数
~laser_likelihood_max_dist (double, default: 2.0 meters):这个参数和运动膨胀有关
~laser_model_type (string, default: "likelihood_field"):激光观测模型
(3)里程计参数(参考博客:https://blog.csdn.net/qq_29796781/article/details/80001355)
~odom_model_type (string, default: "diff"):里程计模型,可选 "diff", "omni", "diff-corrected" or "omni-corrected".
diff:2轮差分 omni:全向轮 y方向有速度
~odom_alpha1 (double, default: 0.2):转角分量的运动噪声 增大该值,机器人发生有旋转运动时,就会出现扇形噪声粒子云
~odom_alpha2 (double, default: 0.2):横向分量运动噪声,噪声在机器人左右两边分布
~odom_alpha3 (double, default: 0.2):纵向分量运动噪声,沿着机器人前进方向分布
~odom_alpha4 (double, default: 0.2): 斜角方向上的运动噪声
~odom_alpha5(double, default: 0.2):第五个参数 对于 2轮差分diff 里程计模型无用,可忽略 该参数只对全向运动模型有用
~odom_frame_id (string, default: "odom"):里程计坐标系
~base_frame_id (string, default: "base_link"):机器人坐标系
~global_frame_id (string, default: "map"):世界坐标系
~tf_broadcast (bool, default: true):默认开启,表示发布出里程计到世界坐标系下的tf转换
注:参数 odom_alpha1~odom_alpha4里程计运动模型噪声 根据实际模型的精度情况来设定
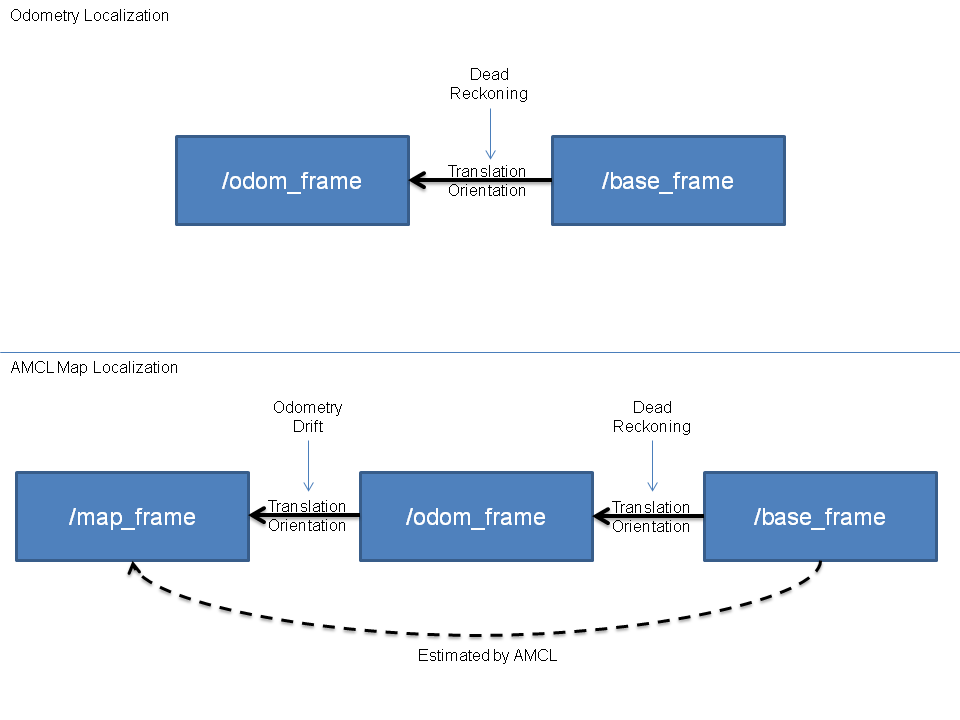
4、转移矩阵示意图
理想情况下,里程计坐标系和世界坐标系是重合的,但是因为传感器有噪声或者机器人车轮打滑或被搬移,里程计坐标系和世界坐标系有了偏差,AMCL可以估计这个偏差量。
5、完整tf树
当amcl节点未启动时,odom->map的信息是没有的,laser_scan到map的数据也是没有的(定位数据),tf树不完整。
更新:
amcl参数dynamic_reconfigure,动态参数可配置
在运行amcl节点后, rosrun rqt_reconfigure rqt_reconfigure,有gui的界面配置参数,调参
里程计初始坐标,是机器人上电后的坐标,和建图的时候一致
意外对象(人的干扰)概率模型
AMCL论文及源码解析--参数(持续更新中)的更多相关文章
- jQuery源码分析学习--资料收集--更新中
1.逐行分析jQuery源码的奥秘 - 网易云课堂 http://study.163.com/course/courseMain.htm?courseId=465001#/courseDetail? ...
- Neural Style论文笔记+源码解析
引言 前面在Ubuntu16.04+GTX1080配置TensorFlow并实现图像风格转换中介绍了TensorFlow的配置过程,以及运用TensorFlow实现图像风格转换,主要是使用了文章A N ...
- Spring IOC 源码解析(持续)
如何查看源码 Spring源码下载https://github.com/spring-projects/spring-framework/tags?after=v3.1.0.RC1 eclipse关联 ...
- 【 js 基础 】【 源码学习 】源码设计 (持续更新)
学习源码,除了学习对一些方法的更加聪明的代码实现,同时也要学习源码的设计,把握整体的架构.(推荐对源码有一定熟悉了之后,再看这篇文章) 目录结构:第一部分:zepto 设计分析第二部分:undersc ...
- Telegram Android源码问题汇总 持续更新
libtgvoip目录为空 git clone下来的工程中带有submodule时,submodule的内容没有下载下来,执行如下命令 cd Telegram git submodule update ...
- Sqli-labs-master通关解析(持续更新中。。。)
大多情况下:SQL注入其实就是构造正确的mysql命令,让网页回显本不应该让我们看到的数据(如用户的账号和密码). 第一关-联合查询注入 查库 // 查看当前页面在的数据库 ?id=-1' union ...
- [源码解析] PyTorch 分布式(15) --- 使用分布式 RPC 框架实现参数服务器
[源码解析] PyTorch 分布式(15) --- 使用分布式 RPC 框架实现参数服务器 目录 [源码解析] PyTorch 分布式(15) --- 使用分布式 RPC 框架实现参数服务器 0x0 ...
- [源码解析] PyTorch 分布式(10)------DistributedDataParallel 之 Reducer静态架构
[源码解析] PyTorch 分布式(10)------DistributedDataParallel之Reducer静态架构 目录 [源码解析] PyTorch 分布式(10)------Distr ...
- [源码解析] PyTorch 分布式(11) ----- DistributedDataParallel 之 构建Reducer
[源码解析] PyTorch 分布式(11) ----- DistributedDataParallel 之 构建Reducer 目录 [源码解析] PyTorch 分布式(11) ----- Dis ...
随机推荐
- JVM解毒——JVM与Java体系结构
你是否也遇到过这些问题? 运行线上系统突然卡死,系统无法访问,甚至直接OOM 想解决线上JVM GC问题,但却无从下手 新项目上线,对各种JVM参数设置一脸懵逼,直接默认,然后就JJ了 每次面试都要重 ...
- js引入,js变量和运算符等
页面级的js不管写在页面的哪里都可以 企业项目开发要求:结构(html),样式(css),行为(js)相分离 不要既写外部js,又写内部js:如果两个都写,则外部js生效 声明多个变量时,每个变量之间 ...
- golang 自定义结构体(与其他语言对象类似)
/* 结构体变量: 结构体的定义只是一种内存布局的描述,只有当结构体实例化时,才会真正地分配内存, 因此必须在定义结构体并实例化后才能使用结构体的字段. type 类型名 struct { 字段1 字 ...
- 卫星轨道相关笔记SGP4
由卫星历书确定卫星轨道状态向量 卫星历书的表示方法有2种: TLE(Two Line Element),和轨道根数表示方法 由卫星历书计算出卫星轨道状态向量的方法有2种: SGP方法,NORAD的方法 ...
- 高级安全Windows防火墙概述以及最佳实践
本文简单介绍Windows防火墙的概念,给出使用场景并列出了常见的防火墙操作. 简介 在Windows NT6.0之后微软推出了高级安全Windows防火墙(简称WFAS),高级安全Windows防火 ...
- zabbix-server配置文件详解
zabbix官方文档:https://www.zabbix.com/documentation/4.0/zh/manual zabbix-server端的配置文件在/etc/zabbix/zabbix ...
- 远程连接Linux下mysql报10061
最近接到一个新活,四台Linux服务器配置MySQL热机双备+IP隧道LVS集群服务,尽管好想使个眼神杀死老大,但特么心里是感激的.不多说一口气装了n个Ubuntu-server. 每次在虚拟机装完M ...
- 多线程笔记 - Master-Worker
多线程的 Master-Worker 从字面上也是可以理解的. Master 相当于领导, 一个就够了, 如果是多个, 那么听谁的, 是个大问题. Master负责指派任务给 Worker. 然后对每 ...
- cesium1.65api版本贴地贴模型标绘工具效果(附源码下载)
前言 cesium 官网的api文档介绍地址cesium官网api,里面详细的介绍 cesium 各个类的介绍,还有就是在线例子:cesium 官网在线例子,这个也是学习 cesium 的好素材. 内 ...
- C#中WinFrom保存文件SaveFileDialog类的使用方法
C#中WinFrom保存文件SaveFileDialog类的使用方法 使用的命名空间是:System.Windows.Forms; 常用属性: Title:保存对话框的标题,默认为"另存 ...