【动画笔记】数据结构-AVL树的插入操作
本笔记前置知识: 二叉搜索(排序)树及其插入操作。
本文主要围绕AVL树的平衡因子、纸上做题思路、失衡类型(LL/RR/LR/RL)、失衡调整方法、插入后回溯这几部分知识点展开。
注:
本笔记中的平衡二叉树规定所有左子树都小于其父节点,所有右子树都大于其父节点。
本笔记中的平衡因子计算方法是
左子树高度 - 右子树高度。
目录
- 简单介绍一下下
- 简述平衡二叉树的插入操作
- 什么是失衡节点
- 纸上快速做题思路
- 程序中定义树节点
- 失衡类型 - LL型失衡
- 失衡类型 - RR型失衡
- 失衡类型 - LR型失衡
- 失衡类型 - RL型失衡
- 程序中判断失衡类型
- 插入后一定要回溯到根节点吗?
- 相关题目
- 谢谢
简单介绍一下下
AVL树又称二叉平衡搜索(排序)树,其最大的特点就是能维持所有节点的左右子树高度差绝对值不大于1。
因此,AVL树的插入操作要能维持住:
二叉搜索树的节点大小关系。
平衡二叉树中每个节点的【平衡因子】绝对值不大于1。
平衡因子
一般对于AVL树中的每个节点都会添加一个平衡因子(Balance Factor)字段,平衡因子的值就是左右子树的高度差,程序借此判断某棵子树是否平衡。
简述平衡二叉树的插入操作
AVL树的插入操作在二叉搜索(排序)树的插入的基础上新增了如下两个过程:
插入过程中将沿途比较的节点压入栈。
插入完成后,借助弹栈来沿着插入时比较的各节点回到整棵树的根节点 (从叶节点到根结点进行回溯):
更新沿途各节点的高度。(通过高度计算平衡因子)
沿途检查各节点的平衡因子,若出现了
平衡因子绝对值 > 1的情况,则对不平衡的子树进行调整以保证整棵树的平衡性。
当然,这里的插入操作也是可以用递归来实现的。
如果AVL树节点中有指向父节点的指针变量,那么这个过程就不需要栈辅助了,直接向上遍历【插入节点】的所有祖先节点直至回到根节点即可。
什么是失衡节点
当树中某个节点的平衡因子 \(BF \notin \left [ -1,1 \right ]\) 时,这个节点就是失衡节点。
以这个失衡节点为根节点的子树就是一棵不平衡的子树。
纸上快速做题思路
这一招适合纸上解题,可以结合程序实现一起理解。
另外,字丑勿cue(╥﹏╥)
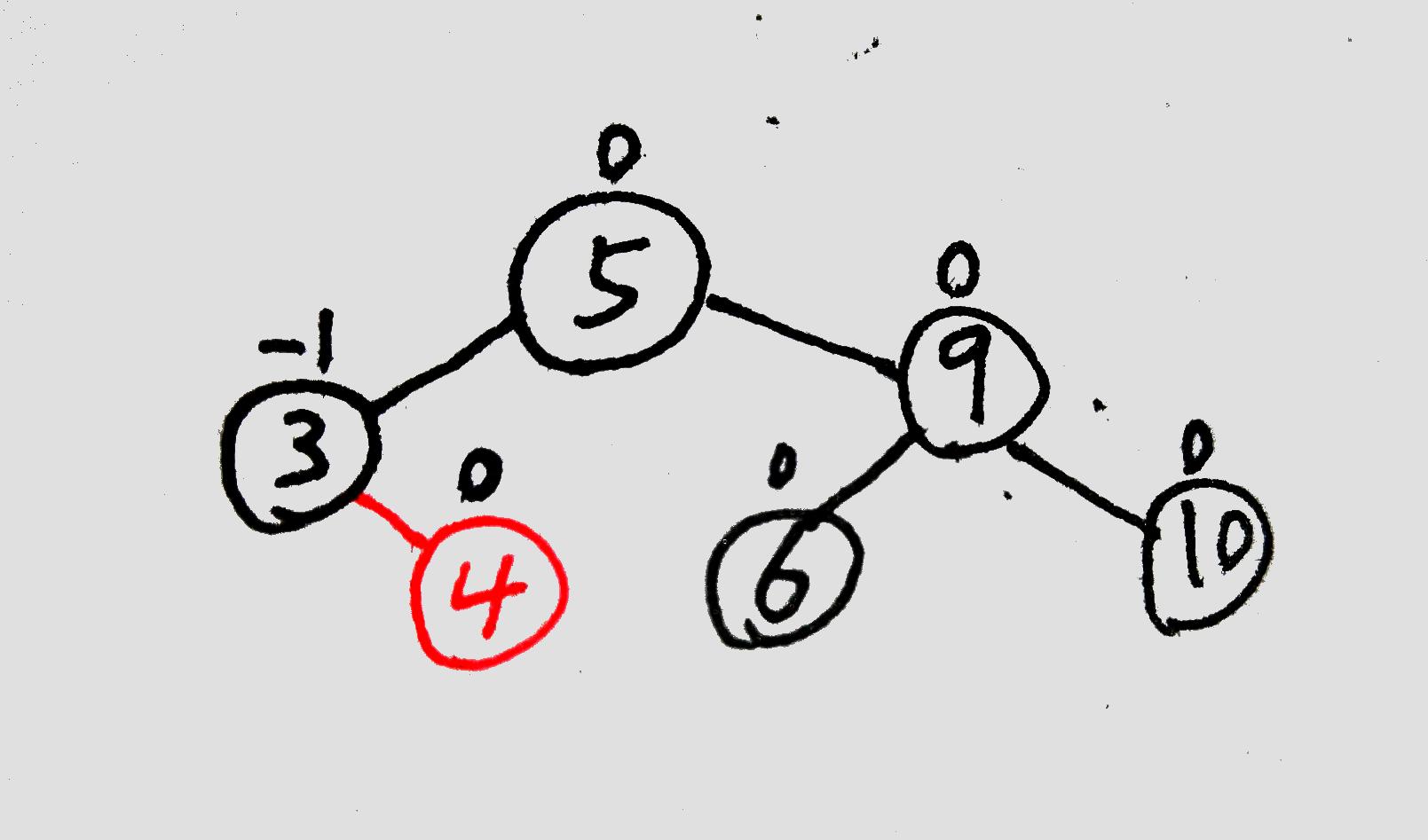
首先插入新节点(红色的节点就是新插入的节点):
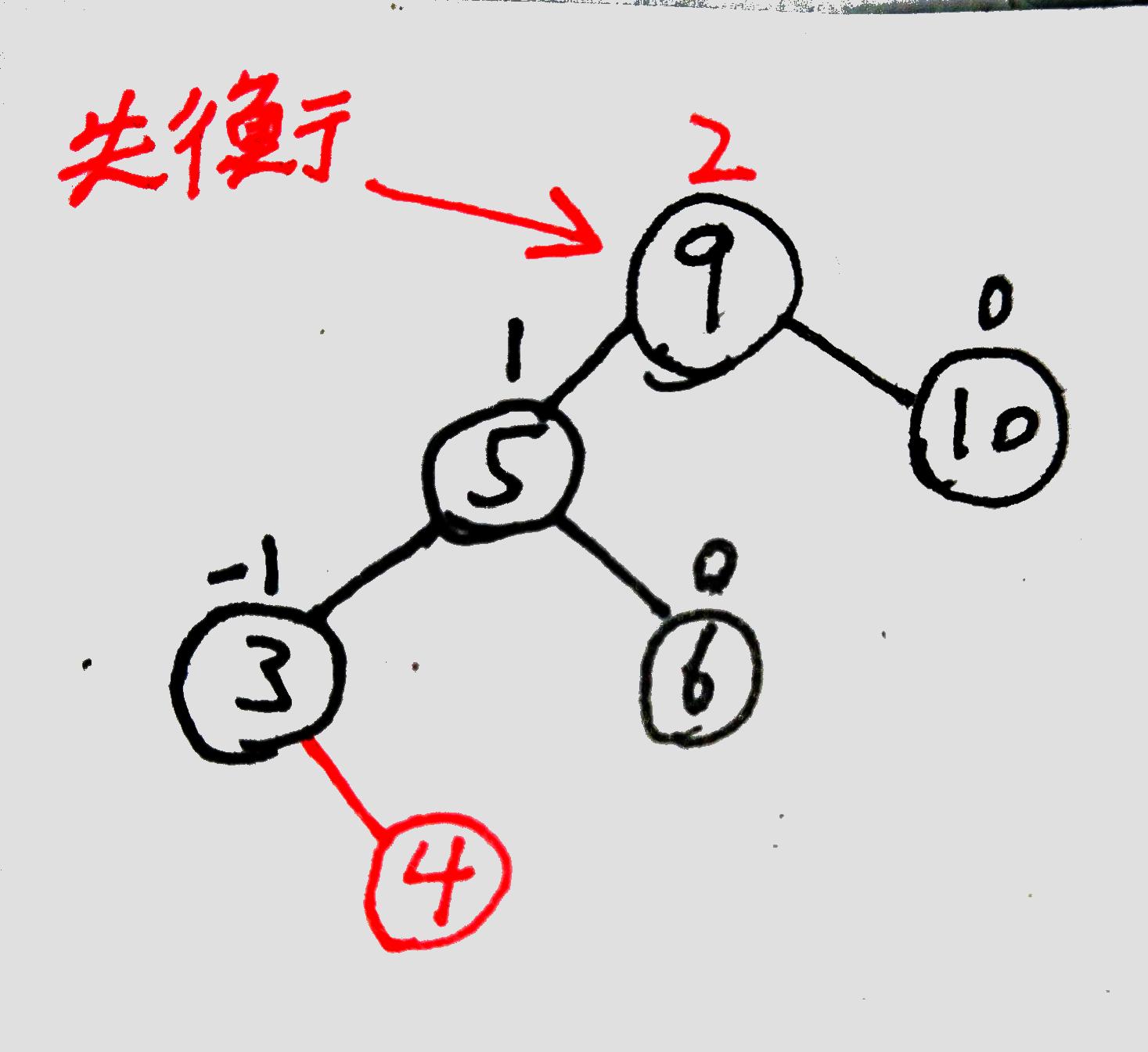
此时【值为9的节点】平衡因子为2,为失衡节点。
从失衡节点开始,沿着【刚刚插入新节点的比较路径】找,找到其中与其最邻近的两个点:
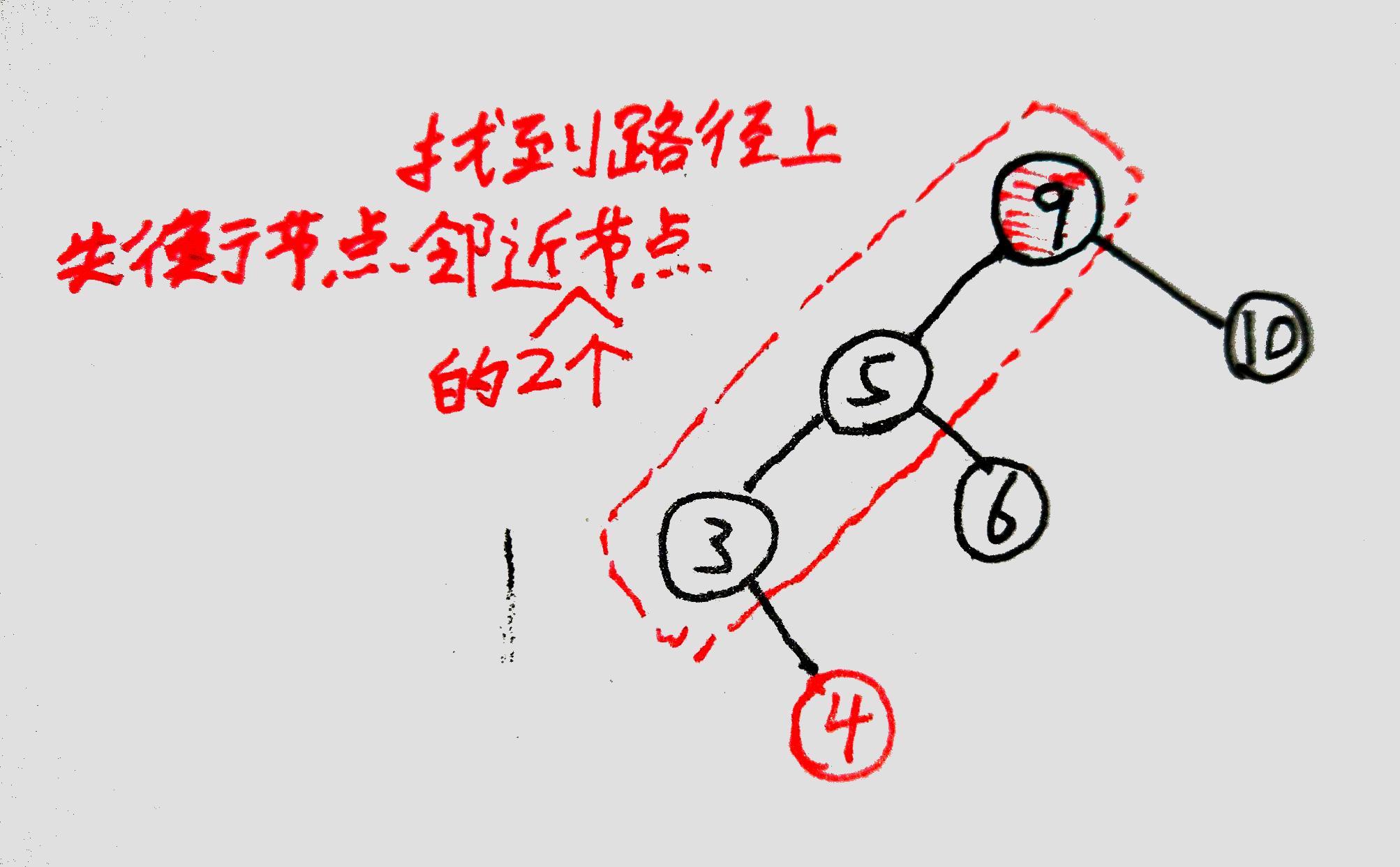
(插入④时的比较路径是⑨->⑤->③,因此图中就找到了③、⑤、⑨)
包括失衡节点在内,现在一共有三个节点,从中选择值的大小在中间的节点。(图中是⑤)
将除了中间值节点外的两个节点按照二叉搜索树的规则接到【中间值节点】上,然后将【中间值节点】接到原本失衡节点所在的位置,作为这棵子树的根节点。
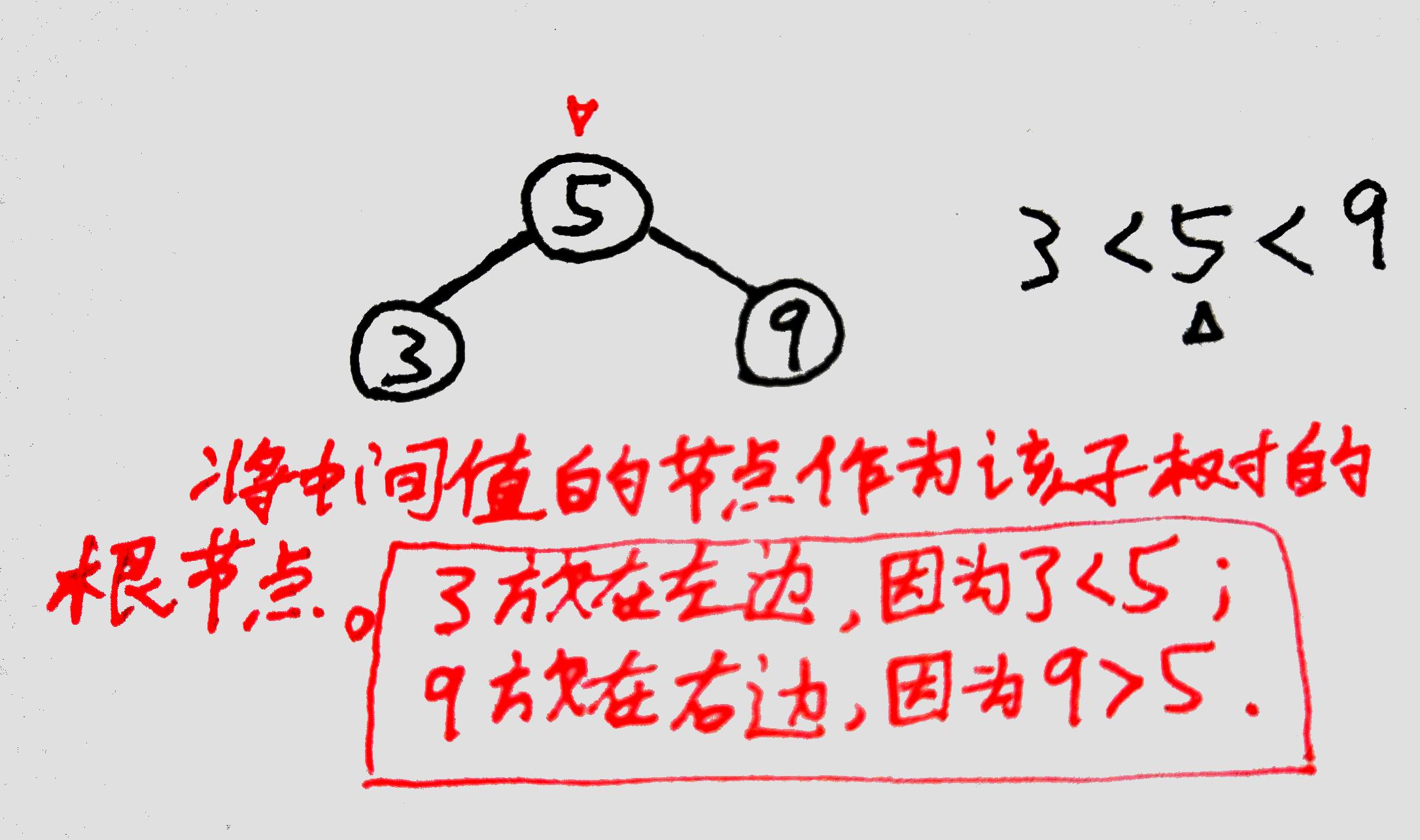
(图中⑤替换了原本⑨的位置,③和⑨变成了⑤的孩子)
将【除了这三个节点之外】的节点按照二叉搜索树插入规则插入到这三个节点组成的子树中:
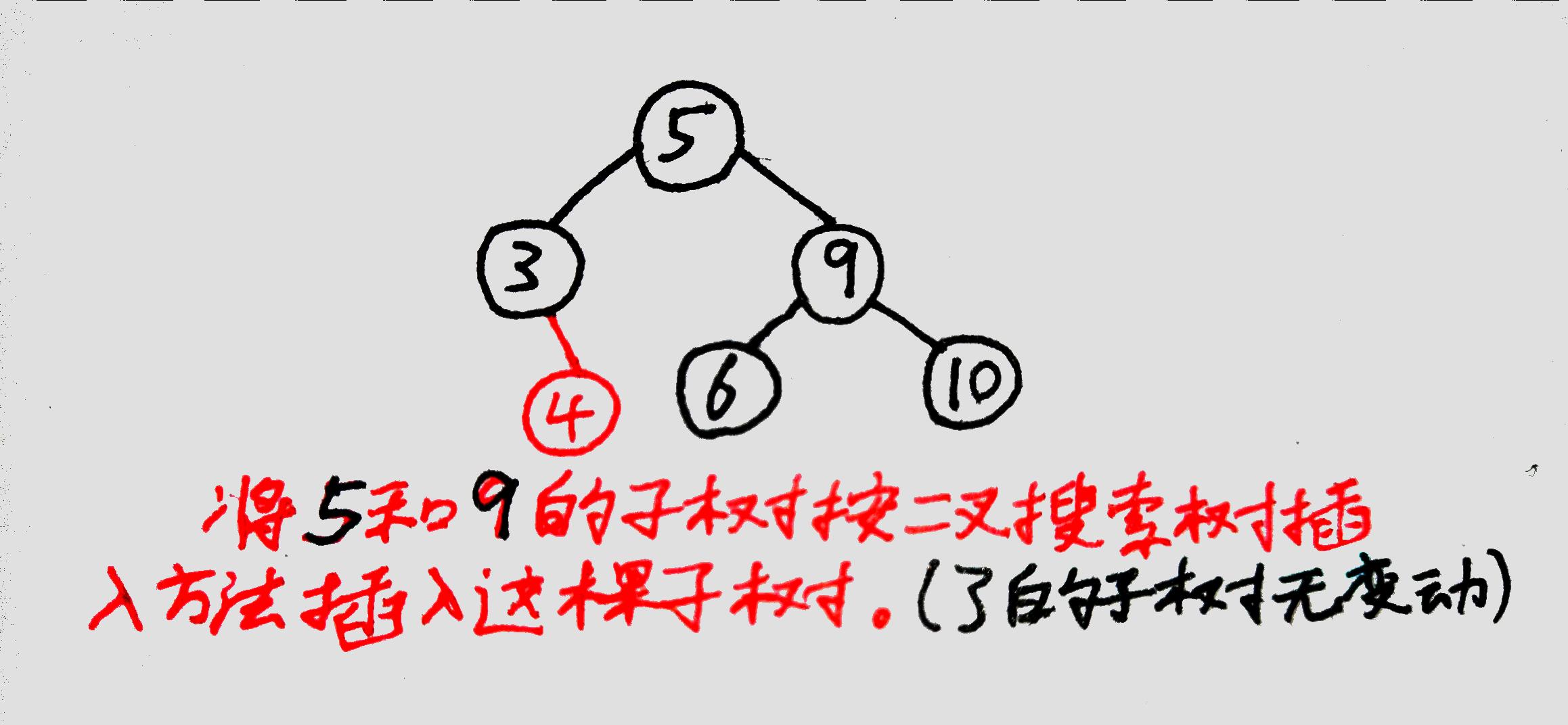
(图中就是把剩余的节点④、⑥、⑩按规则插入到⑤为根的子树中,实际上④没有移动)
更新各节点的平衡因子:
这种解题方法在纸上可以快速解决LL/LR/RL/RR这些类型的平衡调整问题,非常实用。
程序实现的话也可以靠这个思路来记忆和理解。
程序中定义树节点
程序实现没有标准答案,合理即可。
这里的树节点没有指向父节点的指针,因此往树中插入节点的过程中需要压栈,以在插入完成后进行回溯。
typedef struct TreeNode *Tree;struct TreeNode{Tree left; // 左子树Tree right; // 右子树int height; // 节点所在高度,平衡因子靠这个算int val; // 节点值};
失衡类型 - LL型失衡
LL型字面展开来看就是Left - Left。意思是新插入节点位于失衡节点的左孩子的左子树中。
举例
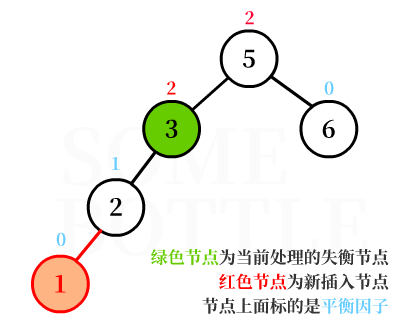
新节点插入在【值为2的节点】的左子树中,而【值为2的节点】又是【值为3的节点】的左孩子。
此时【值为3的节点】的平衡因子BF = 2-0 = 2 > 1,是一个失衡节点。
- 注: 插入节点后的回溯过程当然是自下而上的,因此这里指的是自下而上首个失衡节点。
可以发现新节点插在【失衡节点】的左孩子的左子树中,这就是LL型失衡。
调整方法-右旋转
这里我结合纸上快速做题思路来写一下。
【值为3的节点】是失衡节点。
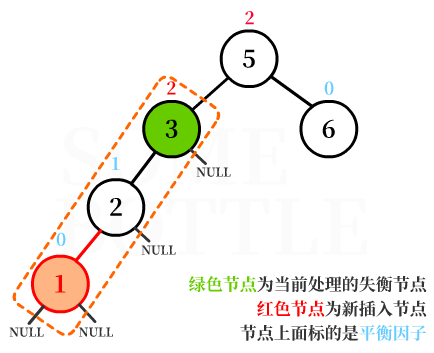
找到失衡节点沿着插入路径上的最邻近的两个节点,一共有三个节点。
这里可以看成是以失衡节点为根结点的子树。- 就是图中框出来的几个节点。
找到三个节点中【值在中间的节点】,接下来的“右旋转”过程以它为轴。
- 上图中找出的就是【值为2的节点】。其实就是失衡节点的左孩子。
将失衡节点以【值在中间的节点】为轴进行右旋转(顺时针),让【值在中间的节点】变成这棵子树的新的根结点。
上图中的【值为3的节点】围绕【值为2的节点】进行右旋转,变成【值为2的节点】的右子树。
【值为2的节点】原本的右子树变成【值为3的节点】的左子树。
【值为2的节点】成为新的子树根结点。(详见动图)
动图演示过程:
通过动图演示就能很直观地看到这个“右旋转”的过程。
可以发现旋转节点围绕的“旋转轴”就是【三个节点中中间值的节点】
图中我特意标出了空子树
NULL,程序实现的时候一定要把子树考虑在内哦。
程序实现
程序实现的时候并不需要比较三个节点的大小。
对某个节点进行右旋转操作时,实际上就是把这个节点绕着其左孩子进行顺时针“旋转”。
// 失衡节点右旋操作,node是失衡结点void rotateRight(Tree node){Tree nodeLeft = node->left; // 失衡节点左子树Tree nodeRight = node->right; // 失衡节点右子树Tree lChildLeft = nodeLeft->left; // 失衡节点的左孩子的左子树Tree lChildRight = nodeLeft->right; // 失衡节点左孩子的右子树// 这里【没有指向父节点】的指针,我们直接修改结点的值来模拟移动结点即可int nodeVal = node->val; // 失衡节点的值node->val = nodeLeft->val; // 交换失衡节点和左孩子的值nodeLeft->val = nodeVal;// 这里已经不是左孩子了,而是“旋转”下来的失衡节点nodeLeft->left = lChildRight; // 修改结点的左右子树nodeLeft->right = node->right;node->left = lChildLeft; // 和子树的根结点接上node->right = nodeLeft;// 此时node是子树根结点,lChildLeft是左子树,nodeLeft是右子树updateHeight(nodeLeft); // 更新有变动的结点的高度,先更新子树再更新根updateHeight(node);}
失衡类型 - RR型失衡
RR型字面展开来看就是Right - Right。意思是新插入节点位于失衡节点的右孩子的右子树中。
举例
新节点插入在【值为8的节点】的右子树中,而【值为8的节点】又是【值为7的节点】的右孩子。
此时【值为7的节点】的平衡因子BF = 0-2 = -2 < -1,是一个失衡节点。
可以发现新节点插在【失衡节点】的右孩子的右子树中,这就是RR型失衡。
调整方法-左旋转
【值为7的节点】是失衡节点。
找到失衡节点沿着插入路径上的最邻近的两个节点,一共有三个节点。
这里可以看成是以失衡节点为根结点的子树。- 就是图中框出来的几个节点。
找到三个节点中【值在中间的节点】,接下来的“左旋转”过程以它为轴。
- 上图中找出的就是【值为8的节点】。其实就是失衡节点的右孩子。
将失衡节点以【值在中间的节点】为轴进行左旋转(逆时针),让【值在中间的节点】变成这棵子树的新的根结点。
上图中的【值为7的节点】围绕【值为8的节点】进行左旋转,变成【值为8的节点】的左子树。
【值为8的节点】原本的左子树变成【值为7的节点】的右子树。
【值为8的节点】成为新的子树根结点。(详见动图)
动图演示过程:
RR型和LL型的调节过程中的操作是对称的。
程序实现
程序实现的时候并不需要比较三个节点的大小。
对某个节点进行左旋转操作时,实际上就是把这个节点绕着其右孩子进行逆时针“旋转”。
// 失衡节点左旋操作,node是失衡节点void rotateLeft(Tree node){Tree nodeLeft = node->left; // 失衡节点左子树Tree nodeRight = node->right; // 失衡节点右子树Tree rChildLeft = nodeRight->left; // 失衡节点的右孩子的左子树Tree rChildRight = nodeRight->right; // 失衡节点的右孩子的右子树// 这里【没有指向父节点】的指针,我们直接修改结点的值来模拟移动结点int nodeVal = node->val;node->val = nodeRight->val; // 交换失衡节点和右孩子的值nodeRight->val = nodeVal;// 这里的nodeRight就是“旋转”下来的节点nodeRight->right = rChildLeft;nodeRight->left = node->left;node->left = nodeRight;node->right = rChildRight;// 此时node是子树根结点,nodeRight是左子树,rChildRight是右子树updateHeight(nodeRight); // 更新有变动的结点的高度,先更新子树再更新根updateHeight(node);}
失衡类型 - LR型失衡
LR型字面展开来看就是Left - Right。意思是新插入节点位于失衡节点的左孩子的右子树中。
举例
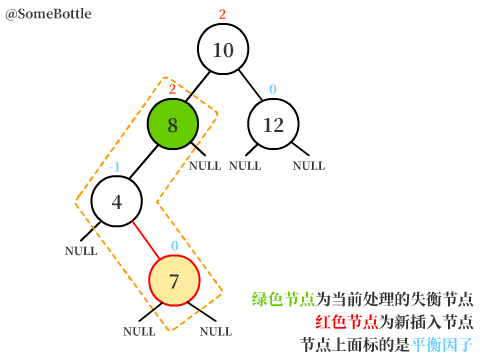
新节点插入在【值为4的节点】的右子树中,而【值为4的节点】又是【值为8的节点】的左孩子。
此时【值为8的节点】的平衡因子BF = 2-0 = 2 > 1,是一个失衡节点。
可以发现新节点插在【失衡节点】的左孩子的右子树中,这就是LR型失衡。
调整方法-先左旋转再右旋转
【值为8的节点】是失衡节点。
找到失衡节点沿着插入路径上的最邻近的两个节点,一共有三个节点。
这里可以看成是以失衡节点为根结点的子树。- 就是图中框出来的几个节点。
找到三个节点中【值在中间的节点】,接下来的“左旋转”过程以它为轴。
- 上图中找出的就是【值为7的节点】。其实是失衡节点的左孩子的右孩子。
将【(三个节点中)值最小的节点】以【值在中间的节点】为轴进行左旋转(逆时针),让【值在中间的节点】转上来,转变成LL型失衡的情况。
上图中的【值为4的节点】围绕【值为7的节点】进行左旋转,变成【值为7的节点】的左子树。
【值为7的节点】原本的左子树变成【值为4的节点】的右子树。
【值为7的节点】成为了【值为8的节点】的左孩子。
此时整棵树已经调整成了LL型失衡的情况,接着用右旋转进行调整即可。详见动图。
动图演示过程:
可以很直观地看到,首先用左旋转将平衡树转变为了LL失衡的情况,再用右旋转对树进行调整。
可以发现整个过程中,旋转节点围绕的“旋转轴”都是【三个节点中中间值的节点】
程序实现
程序实现的时候并不需要比较三个节点的大小。
对某个节点A进行左旋转+右旋转操作时,实际上做的是:
令该节点A的左孩子为B,首先将B绕着B的右孩子进行逆时针旋转。
(对B进行左旋转)然后将节点A绕着B进行顺时针旋转。
(对A进行右旋转)
// 失衡节点左右旋操作,node是失衡节点rotateLeft(node->left); // 先对失衡节点的左孩子进行左旋rotateRight(node); // 再对失衡节点进行右旋
失衡类型 - RL型失衡
RL型字面展开来看就是Right - Left。意思是新插入节点位于失衡节点的右孩子的左子树中。
举例
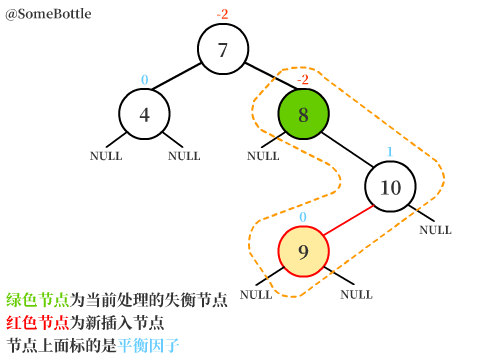
新节点插入在【值为10的节点】的左子树中,而【值为10的节点】又是【值为8的节点】的右孩子。
此时【值为8的节点】的平衡因子BF = 0-2 = -2 < -1,是一个失衡节点。
可以发现新节点插在【失衡节点】的右孩子的左子树中,这就是RL型失衡。
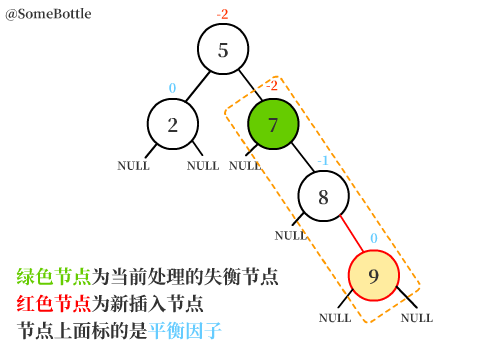
调整方法-先右旋转再左旋转
【值为8的节点】是失衡节点。
找到失衡节点沿着插入路径上的最邻近的两个节点,一共有三个节点。
这里可以看成是以失衡节点为根结点的子树。- 就是图中框出来的几个节点。
找到三个节点中【值在中间的节点】,接下来的“右旋转”过程以它为轴。
- 上图中找出的就是【值为9的节点】。其实是失衡节点的右孩子的左孩子。
将【(三个节点中)值最大的节点】以【值在中间的节点】为轴进行右旋转(顺时针),让【值在中间的节点】转上来,转变成RR型失衡的情况。
上图中的【值为10的节点】围绕【值为9的节点】进行右旋转,变成【值为9的节点】的右子树。
【值为9的节点】原本的右子树变成【值为10的节点】的左子树。
【值为9的节点】成为了【值为8的节点】的右孩子。
此时整棵树已经调整成了RR型失衡的情况,接着用左旋转进行调整即可。详见动图。
动图演示过程:
可以很直观地看到,首先用右旋转将平衡树转变为了RR失衡的情况,再用左旋转对树进行调整。
LR型和RL型的调节过程中的操作也是对称的。
可以发现整个过程中,旋转节点围绕的“旋转轴”始终都是【三个节点中中间值的节点】
程序实现
程序实现的时候并不需要比较三个节点的大小。
对某个节点A进行右旋转+左旋转操作时,实际上做的是:
令该节点A的右孩子为B,首先将B绕着B的左孩子进行顺时针旋转。
(对B进行右旋转)然后将节点A绕着B进行逆时针旋转。
(对A进行左旋转)
// 失衡节点右左旋操作,node是失衡节点rotateRight(node->right); // 先对失衡节点的右孩子进行右旋rotateLeft(node); // 再对失衡节点进行左旋
程序中判断失衡类型
程序中,咱们依赖于平衡因子来判断失衡类型。
平衡因子由左右子树的高度差决定,因此根据平衡因子能判断出新节点插入在哪里:
当失衡节点的平衡因子
> 1时:如果失衡节点的左孩子的平衡因子
> 0,则是LL型失衡。如果失衡节点的左孩子的平衡因子
< 0,则是LR型失衡。
当失衡节点的平衡因子
< -1时:如果失衡节点的右孩子的平衡因子
< 0,则是RR型失衡。如果失衡节点的右孩子的平衡因子
> 0,则是RL型失衡。
展开查看程序实现
// curr节点失衡了, 需要进行调整// bf是这个节点的平衡因子if (bf > 1) // 失衡节点的平衡因子>1,说明左子树比较高,因此找失衡节点的左孩子{// 看失衡节点左孩子的平衡因子int leftBf = balanceFactor(curr->left);if (leftBf > 0) // 这个左孩子的左子树高于右子树{// 这说明是LL型,即插入在失衡节点【左孩子的左子树中】而导致失衡,需要进行“右旋”进行调整rotateRight(curr);}else // 这个左孩子的右子树高于左子树{// 这说明是LR型,插入在失衡结点【左孩子的右子树中】而导致失衡,需要进行“左旋再右旋”进行调整rotateLeft(curr->left); // 先对左孩子进行左旋rotateRight(curr); // 再对失衡节点进行右旋}}else if (bf < -1) // 失衡节点的平衡因子<-1,说明右子树比较高,因此找失衡节点的右孩子{int rightBf = balanceFactor(curr->right);if (rightBf < 0) // 右孩子的右子树高于左子树{// 这说明是RR型,即插入在失衡节点【右孩子的右子树中】,需要进行“左旋”进行调整rotateLeft(curr);}else // 右孩子的左子树高于右子树{// 这说明是RL型,即插入在失衡节点【右孩子的左子树中】,需要进行“右旋再左旋”进行调整rotateRight(curr->right); // 先对右孩子进行右旋rotateLeft(curr); // 再对失衡节点进行左旋}}
插入后一定要回溯到根节点吗?
本文开头咱简述了一下AVL树的插入操作。
在往AVL树中插入了一个节点后,需要沿着祖先节点向上回溯到根节点,沿途更新每个节点的高度,并寻找失衡的节点来进行调整。
节点的高度用于计算平衡因子。
遇到平衡因子为0的节点时回溯可以停止
实际上,在插入后的回溯过程中,如果发现某节点的平衡因子 = 0,就可以不用再回溯了。
原因
究其原因,咱们得关注一下插入前和插入后的平衡因子变化情况:
插入前,AVL树中每棵子树都是平衡的,也就是说,所有节点的平衡因子都在
[-1, 1]范围内。若树中某节点A的平衡因子 \(BF \in \left \lbrace -1,1 \right \rbrace\) ,就意味着节点A的左子树和右子树的高度差的绝对值为1。
复习一下,
BF = 左子树高度 - 右子树高度。如果当插入了一个新节点后,节点A的平衡因子 \(BF=0\) :
插入前 插入后 子树的高度 节点A所在的高度 节点A的平衡因子 \(BF=1\) \(BF=0\) 节点A的右子树变高,说明新节点插入在其右子树中 无变化 节点A的平衡因子 \(BF=-1\) \(BF=0\) 节点A的左子树变高,说明新节点插入在其左子树中 无变化 【节点A所在的高度】取决于其较高的一棵子树,而当平衡因子BF从【1或-1】变为0时,只是节点A的【原本较矮的一棵子树】的高度变得和较高的子树高度一样了,因此节点A所在的高度理所当然没有发生改变。
在插入后的回溯过程中会更新沿途节点的高度。在更新节点A的父节点【FA】的高度时,由于节点A的高度没有发生变化,因此FA节点的高度也不会发生变化;同时,FA节点的平衡因子也不会发生变化。
FA节点的高度 = max(节点A的高度, FA节点另一个孩子的高度) + 1
依此类推,节点A的所有祖先节点的高度和平衡因子都不会发生变化,因此回溯过程在节点A这里就可以停止了。
所以,在回溯过程中如果遇到了平衡因子为0的节点,就可以不用再继续下去了。
相关题目
正好在DotCpp上找到了一个只考察AVL树插入和查找的题目:
我的题解:
谢谢
感谢你看到这里。希望我的笔记能对你有所帮助~ 再会!( ´・ω・)ノ
【动画笔记】数据结构-AVL树的插入操作的更多相关文章
- AVL树的插入操作(旋转)图解
=================================================================== AVL树的概念 在说AVL树的概念之前,我们需要清楚 ...
- 数据结构--Avl树的创建,插入的递归版本和非递归版本,删除等操作
AVL树本质上还是一棵二叉搜索树,它的特点是: 1.本身首先是一棵二叉搜索树. 2.带有平衡条件:每个结点的左右子树的高度之差的绝对值最多为1(空树的高度为-1). 也就是说,AVL树,本质上 ...
- AVL树的插入和删除
一.AVL 树 在计算机科学中,AVL树是最早被发明的自平衡二叉查找树.在AVL树中,任一节点对应的两棵子树的最大高度差为 1,因此它也被称为高度平衡树.查找.插入和删除在平均和最坏情况下的时间复杂度 ...
- AVL 树的插入、删除、旋转归纳
参考链接: http://blog.csdn.net/gabriel1026/article/details/6311339 1126号注:先前有一个概念搞混了: 节点的深度 Depth 是指从根 ...
- AVL树的插入与删除
AVL 树要在插入和删除结点后保持平衡,旋转操作必不可少.关键是理解什么时候应该左旋.右旋和双旋.在Youtube上看到一位老师的视频对这个概念讲解得非常清楚,再结合算法书和网络的博文,记录如下. 1 ...
- 数据结构-AVL树的旋转
http://blog.csdn.net/GabrieL1026/article/details/6311339 平衡二叉树在进行插入操作的时候可能出现不平衡的情况,AVL树即是一种自平衡的二叉树,它 ...
- AVL树的插入删除查找算法实现和分析-1
至于什么是AVL树和AVL树的一些概念问题在这里就不多说了,下面是我写的代码,里面的注释非常详细地说明了实现的思想和方法. 因为在操作时真正需要的是子树高度的差,所以这里采用-1,0,1来表示左子树和 ...
- 再回首数据结构—AVL树(一)
前面所讲的二叉搜索树有个比较严重致命的问题就是极端情况下当数据以排序好的顺序创建搜索树此时二叉搜索树将退化为链表结构因此性能也大幅度下降,因此为了解决此问题我们下面要介绍的与二叉搜索树非常类似的结构就 ...
- 第三十二篇 玩转数据结构——AVL树(AVL Tree)
1.. 平衡二叉树 平衡二叉树要求,对于任意一个节点,左子树和右子树的高度差不能超过1. 平衡二叉树的高度和节点数量之间的关系也是O(logn) 为二叉树标注节点高度并计算平衡因子 AVL ...
- Java数据结构——AVL树
AVL树(平衡二叉树)定义 AVL树本质上是一颗二叉查找树,但是它又具有以下特点:它是一棵空树或它的左右两个子树的高度差的绝对值不超过1,并且左右两个子树都是一棵平衡二叉树,并且拥有自平衡机制.在AV ...
随机推荐
- November 练习(Tou Xue)打卡
Flag:NOIP前偷100道 \(\text{CF }1600\sim 2000+\) \(\text{or}\) \(\text{At } 1200\sim 1800+\) \(\text{or} ...
- 13、设计一个函数process,在你调用他的时候,每次实现不同的功能,输入a,b两个数, 第一次调用时找出a,b中的最大者。 第二次找出最小者,,第三次求两个数的和。
/* 设计一个函数process,在你调用他的时候,每次实现不同的功能,输入a,b两个数, 第一次调用时找出a,b中的最大者. 第二次找出最小者,,第三次求两个数的和. */ #include < ...
- lambda、map、reduce、filter、sorted函数
# lambda 函数from functools import reducea = lambda x: x ** 2print(a(3))def power(func, l=[]): return ...
- hashlib加密模块、加密补充说明、subprocess模块、logging日志模块
目录 hashlib加密模块 加密补充说明 subprocess模块 logging日志模块 日志的组成 日志配置字典 hashlib加密模块 1.何为加密 将明文数据处理成密文数据 让人无法看懂 2 ...
- windows 使用ACR122U-A9设备读写M1卡
软件地址 M1卡服务程序 安装好驱动后就可以破解,破解成功后的秘钥会显示出来(记录下来),同级目录会生成一个dump文件,这个文件包含此M1卡的全部数据,可以使用hexedit打开,编辑或修改 Mif ...
- Execute Crond Service on openEuler
一.Execute Crond Service on openEuler 1 crond 概述 crond就是计划任务/定时任务 常见有闹钟.PC端定时关机 shutdown -s -t 200,定时 ...
- Day29 派生, 封装 , 多态, 反射
Day29 派生, 封装 , 多态, 反射 内容概要 派生方法的实践 面向对象之封装 面向对象之多态 面向对象之反射 反射的实践案例 内容详细 1.派生方法的实践 #需求展示 import json ...
- ArcObjects SDK开发 001 ArcObjects SDK 简介
1.什么是ArcObjects SDK 在网上搜索什么是ArcObjects,会搜到如下的定义. 这个定义比较准确,也比较容易理解. 2.什么是ArcEngine 在网上搜索ArcEngine,一般会 ...
- Tkinter根据屏幕分辨率最大化适应屏幕
还不能够实现所有组件随分辨率自动变化 # 实现的是界面覆盖整个屏幕 from tkinter import * import win32api, win32con # 获取屏幕的分辨率 width = ...
- JavaEE Day09 JavaScript基础
之前学了html.css两种静态资源 JavaScript是另一种静态资源,今日内容[重点]:JavaScript(是一门编程语言,2days)基础 一.JavaScript简介 1.概念 JavaS ...