使用 rqt_console 和 roslaunch---8
使用 rqt_console 和 roslaunch
Description: 本教程介绍如何使用rqt_console和rqt_logger_level进行调试,以及如何使用roslaunch同时运行多个节点。早期版本中的rqt工具并不完善,因此,如果你使用的是“ROS fuerte”或更早期的版本,请同时参考这个页面学习使用老版本的“rx”工具。
Tutorial Level: BEGINNER
Next Tutorial: 如何使用rosed
Contents
预先安装rqt和turtlesim程序包
本教程会用到rqt 和 turtlesim这两个程序包,如果你没有安装,请先安装:
$ sudo apt-get install ros-<distro>-rqt ros-<distro>-rqt-common-plugins ros-<distro>-turtlesim
请使用ROS发行版名称(比如 electric、fuerte、groovy、hydro或最新的indigo)替换掉<distro>。
注意: 你可能已经在之前的某篇教程中编译过rqt和turtlesim,如果你不确定的话重新编译一次也没事。
使用rqt_console和rqt_logger_level
rqt_console属于ROS日志框架(logging framework)的一部分,用来显示节点的输出信息。rqt_logger_level允许我们修改节点运行时输出信息的日志等级(logger levels)(包括 DEBUG、WARN、INFO和ERROR)。
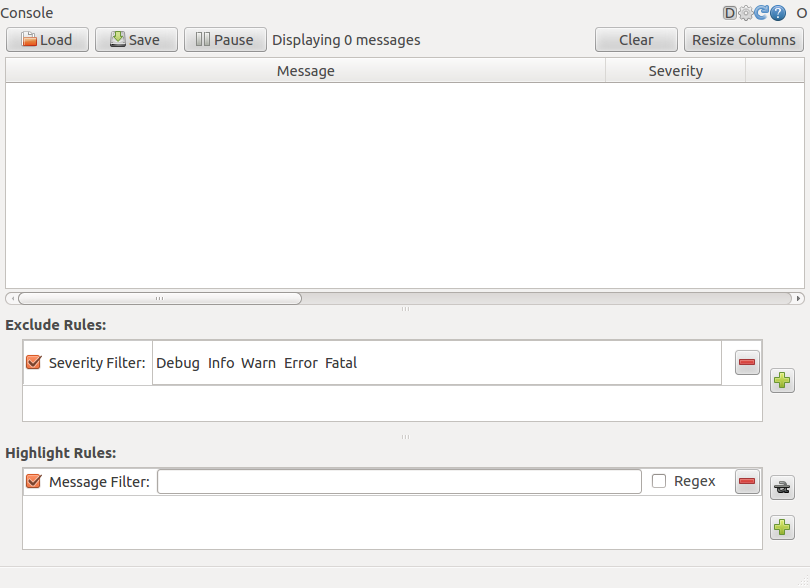
现在让我们来看一下turtlesim在rqt_console中的输出信息,同时在rqt_logger_level中修改日志等级。在启动turtlesim之前先在另外两个新终端中运行rqt_console和rqt_logger_level:
$ rosrun rqt_console rqt_console
$ rosrun rqt_logger_level rqt_logger_level
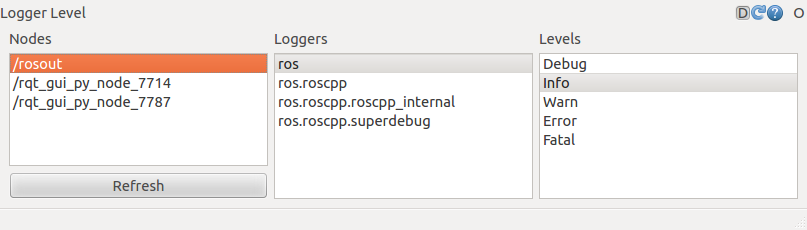
你会看到弹出两个窗口:
现在让我们在一个新终端中启动turtlesim:
$ rosrun turtlesim turtlesim_node
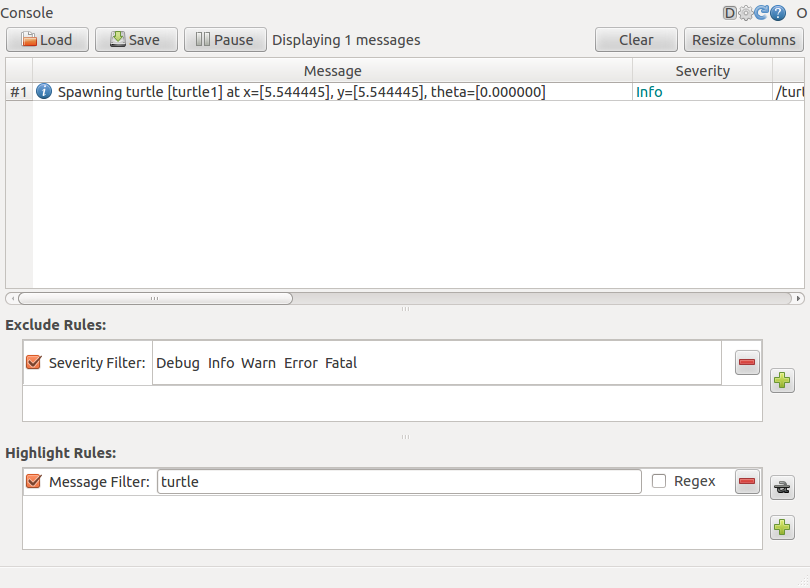
因为默认日志等级是INFO,所以你会看到turtlesim启动后输出的所有信息,如下图所示:
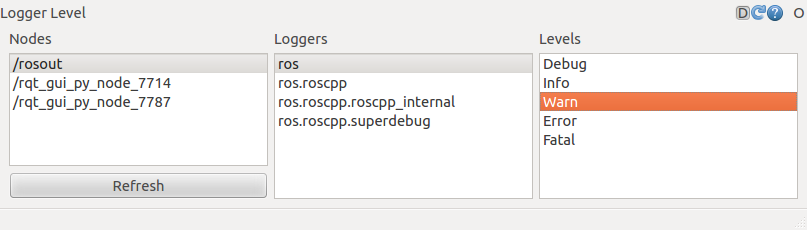
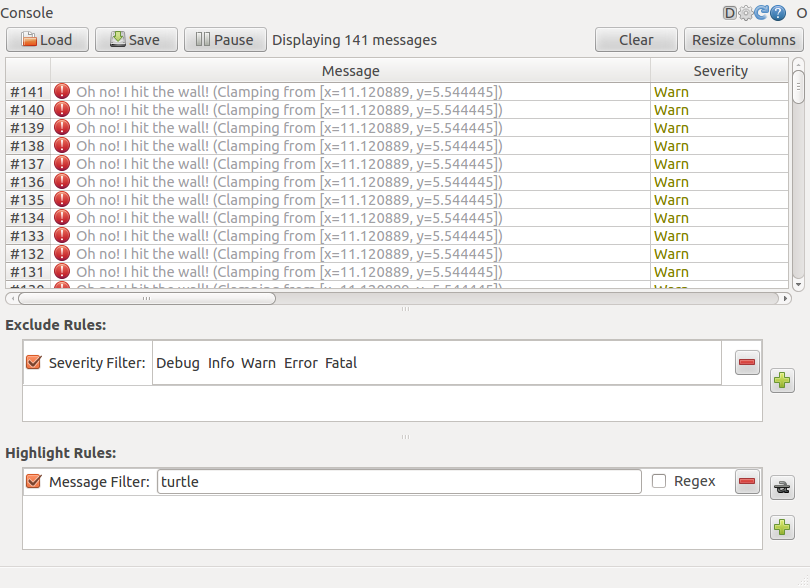
现在让我们刷新一下rqt_logger_level窗口并选择Warn将日志等级修改为WARN,如下图所示:
现在我们让turtle动起来并观察rqt_console中的输出(非hydro版):
rostopic pub /turtle1/command_velocity turtlesim/Velocity -r 1 -- 2.0 0.0
hydro版:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
日志等级说明
日志等级按以下优先顺序排列:
Fatal
Error
Warn
Info
Debug
Fatal是最高优先级,Debug是最低优先级。通过设置日志等级你可以获取该等级及其以上优先等级的所有日志消息。比如,将日志等级设为Warn时,你会得到Warn、Error和Fatal这三个等级的所有日志消息。
现在让我们按Ctrl-C退出turtlesim节点,接下来我们将使用roslaunch来启动多个turtlesim节点和一个模仿节点以让一个turtlesim节点来模仿另一个turtlesim节点。
使用roslaunch
roslaunch可以用来启动定义在launch文件中的多个节点。
用法:
$ roslaunch [package] [filename.launch]
先切换到beginner_tutorials程序包目录下:
$ roscd beginner_tutorials
如果roscd执行失败了,记得设置你当前终端下的ROS_PACKAGE_PATH环境变量,设置方法如下:
$ export ROS_PACKAGE_PATH=~/<distro>_workspace/sandbox:$ROS_PACKAGE_PATH
$ roscd beginner_tutorials
如果你仍然无法找到beginner_tutorials程序包,说明该程序包还没有创建,那么请返回到ROS/Tutorials/CreatingPackage教程,并按照创建程序包的操作方法创建一个beginner_tutorials程序包。
然后创建一个launch文件夹:
$ mkdir launch
$ cd launch
Launch 文件
现在我们来创建一个名为turtlemimic.launch的launch文件并复制粘贴以下内容到该文件里面:
1 <launch>
2
3 <group ns="turtlesim1">
4 <node pkg="turtlesim" name="sim" type="turtlesim_node"/>
5 </group>
6
7 <group ns="turtlesim2">
8 <node pkg="turtlesim" name="sim" type="turtlesim_node"/>
9 </group>
10
11 <node pkg="turtlesim" name="mimic" type="mimic">
12 <remap from="input" to="turtlesim1/turtle1"/>
13 <remap from="output" to="turtlesim2/turtle1"/>
14 </node>
15
16 </launch>
Launch 文件解析
现在我们开始逐句解析launch xml文件。
1 <launch>
在这里我们以launch标签开头以表明这是一个launch文件。
在这里我们创建了两个节点分组并以'命名空间(namespace)'标签来区分,其中一个名为turtulesim1,另一个名为 turtlesim2,两个组里面都使用相同的turtlesim节点并命名为'sim'。这样可以让我们同时启动两个turtlesim模拟器而不会产 生命名冲突。
11 <node pkg="turtlesim" name="mimic" type="mimic">
12 <remap from="input" to="turtlesim1/turtle1"/>
13 <remap from="output" to="turtlesim2/turtle1"/>
14 </node>
在这里我们启动模仿节点,并将所有话题的输入和输出分别重命名为turtlesim1和turtlesim2,这样就会使turtlesim2模仿turtlesim1。
16 </launch>
这个是launch文件的结束标签。
roslaunching
现在让我们通过roslaunch命令来启动launch文件:
$ roslaunch beginner_tutorials turtlemimic.launch
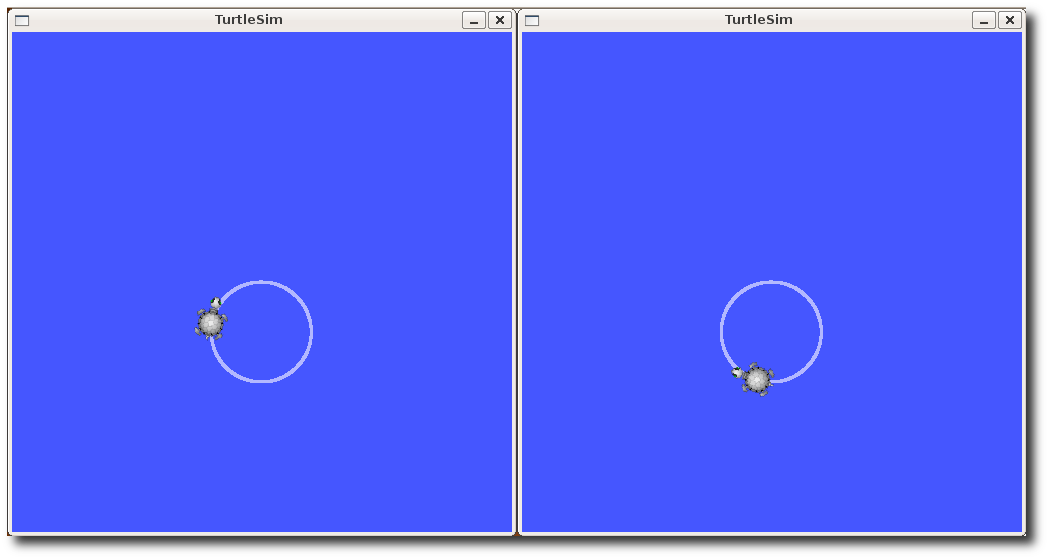
现在将会有两个turtlesims被启动,然后我们在一个新终端中使用rostopic命令发送速度设定消息:
非hydro版:
$ rostopic pub /turtlesim1/turtle1/command_velocity turtlesim/Velocity -r 1 -- 2.0 -1.8
hydro版:
$ rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
你会看到两个turtlesims会同时开始移动,虽然发布命令只是给turtlesim1发送了速度设定消息。
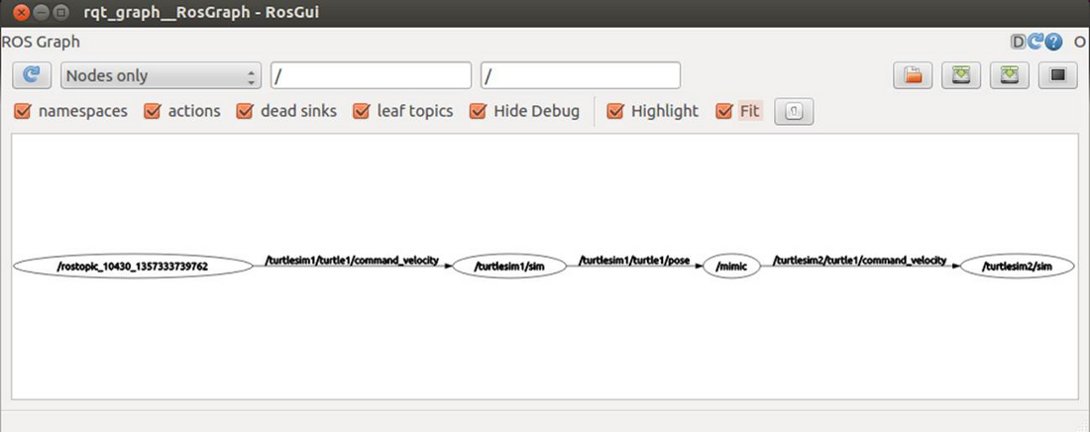
我们也可以通过rqt_graph来更好的理解在launch文件中所做的事情。运行rqt并在主窗口中选择rqt_graph:
$ rqt
或者直接运行:
$ rqt_graph
到此,我们算是已经学会了rqt_console和roslaunch命令的使用,接下来我们开始学习使用rosed——ROS中的编辑器。现在你可以按Ctrl-C退出所有turtlesims节点了,因为在下一篇教程中你不会再用到它们。
使用 rqt_console 和 roslaunch---8的更多相关文章
- 理解ROS rqt_console和 roslaunch
1.使用rqt_console和roslaunch 这篇教程将介绍使用rqt_console和rqt_logger_level来调试以及使用roslaunch一次启动许多nodes.如果你使用ROS ...
- Using rqt_console and roslaunch
Description: This tutorial introduces ROS using rqt_console and rqt_logger_level for debugging and r ...
- ROS学习(九)—— rqt_console 和 roslaunch
一.rqt_console 和rqt_logger_level 1.作用: rqt_console依据ROS编译日志,输出节点信息 rqt_logger_level可以改变节点的警告出差的警告等级 2 ...
- ROS学习手记 - 6 使用ROS中的工具:rqt_console & roslaunch & rosed
http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch Using rqt_console and roslaunch This tuto ...
- 快速了解 Robot Operating System(ROS) 机器人操作系统
http://www.ros.org/ 关于ROS About ROS http://www.ros.org/about-ros/ 机器人操作系统(ROS)是用于编写机器人软件的灵活框架.目的在简化 ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- ROS_Kinetic_02 ROS Kinetic 迁移指南及中文wiki指南(Migration guide)
ROS_Kinetic_02 ROS Kinetic 迁移指南(Migration guide) 对于ROS Kinetic Kame有些功能包已经更新改变,提供关于这些包的迁移注意或教程.主要针对于 ...
- ROS教程
Learning ROS 学习ROS Depending on your learning style and preferences, you can take two approaches to ...
- ROS官网新手级教程总结
第 1 关卡:安装和配置 ROS 环境 目标:在计算机上安装和配置 ROS 环境. 安装 ROS 按照 ROS 安装说明进行安装. 管理环境 确定环境变量 ROS_ROOT 和 ROS_PACKAGE ...
随机推荐
- php 获取当前url,可以规避框架url重写后还有index.php的情况
function get_url(){ $pageURL = 'http'; if ($_SERVER["HTTPS"] == "on") { $pageURL ...
- HDU 4627 E(Contest #3)
Description There are many unsolvable problem in the world.It could be about one or about zero.But t ...
- Android EditText email、数字验证
在做Android注册登录模块的时候,经常需要在客户端就验证用户输入的信息的正确性,如填写邮箱需要验证是否是邮箱,填写手机.年龄等信息需要验证是否是数字.先介绍一下验证邮箱的代码: /** * met ...
- 未能加载文件或程序集“System.WEB.DataVisualization, Version=3.5.0.0, Culture=neutral
项目打开 提示 如题错误. 最近用VS2010 + .NET Framework3.5SP1开发程序,使用了MsChart,但是部署到服务器的时候提示如下错误: 分析器错误消息: 未能加载文件或程序集 ...
- c# Winforms WebBrowser - Clear all cookies
Hello, I recently search for a method to delete all cookies from the build in .NET WinForms WebBro ...
- Javascript之clipBoard操作
1.clipBoard 是网页上剪贴板,可以获取剪切板上值,可能类似物键-值对这种模式取值\赋值,如果在copy网上的某篇博客时,往往会带有“转载自xxxx地方 http://www.xxx.com/ ...
- poj1845 数论
//Accepted 204K 16MS //约数和 //n=p1^e1*p2^e2***pk^ek //约数和为:(p1^0+p1^1+..+p1^e1)*(p2^0+p2^1+..+p2^e2)* ...
- UVALive 4682 XOR Sum (trie)
题意:求一段连续的数字使得它们的异或和最大. 思路:首先利用前缀和求sum[i],这样求某段连续数字异或和最大就是求某两个j和i满足sum[i]^sum[j-1]最大,问题就变成了找两个数的异或最大. ...
- return, exit, _exit的区别
return是返回的最常用的方式 _exit属于POSIX定义的系统调用 exit是GLIBC封装之后的函数 1 _exit和exit都会导致整个进程退出,清理进程所占用的资源,但是glibc封装ex ...
- Python 3.x print 小结
Python 思想: “一切都是对象!” input("Press Enter") 就可以让程序运行完后停一下 输出的 print 函数总结: 1. 字符串和数值类型可以直接输出 ...