[C#] 编程控制笔记本蓝牙与外部蓝牙设备通信
一、蓝牙模块XLBT232‐D01介绍(外部设备蓝牙)

1.1、蓝牙模块简介
XLBT232-D0101蓝牙模块采用CSR BlueCore 芯片,配置6-8Mbit 的软件存储空间,
支持AT 指令,用户可根据需要更改SPP 角色(主、从模式)以及串口波特率、
设备名称、配对密码等参数,使用灵活。
1.2、模块功能介绍
1.2.1、特性
- 蓝牙协议:Bluetooth Specification V2.1+EDR、V2.0+EDR、V2.1、V2.0 V1.2
- 工作频率:2.4GHz ISM band
- 调制方式:GFSK(Gaussian Frequency Shift Keying)
- 发射 率:≤4dBm, Class 2
- 灵 敏 度:≤-84dBm at 0.1% BER
- 传输速率:Asynchronous: 2.1Mbps(Max) / 160 kbpsSynchronous: 1Mbps/1Mbps
- 安全特性:Authentication and encryption
- 支持服务:Bluetooth SPP(主模式& 从模式)
- 供电电源:+3.3VDC 50mA
- 工作温度:-5 ~ +65 Centigrade
- 外观尺寸:26.9mm x 13mm x 2.2 mm
1.2.2、模块接线原理图
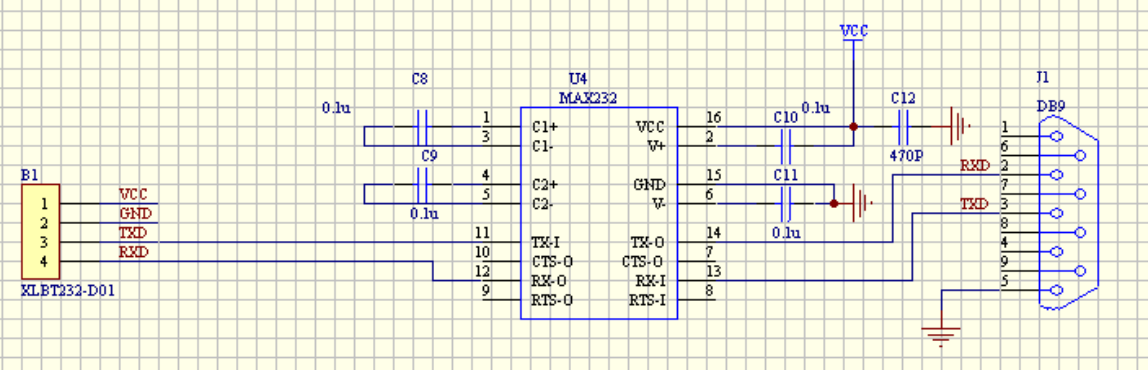
PS:当然也能用USB转TTL模块进行连接在电脑上调试,毕竟大多数笔记本已经没有串口啦!
1.3、使用说明
 [图:蓝牙模块]
[图:蓝牙模块]
>_<" KEY为输入管脚,短按控制,或者输入约100ms 的高电平单次脉冲,可以
实现以下功能:
- 模块设置为SPP 主机模式时:
未连接状态时:清除配对信息(若存在配对设备信息)
已连接状态时:主动发起断开连接,延时150ms 后重启,重新搜索
连接从设备; 在断开连接时:重新搜索连接从设备。
- 模块设置为SPP 从机时:
在已连接状态时:主动发起断开连接,延时150ms 后重启,重新进入被搜
索状态,等待主机配对和连接
在断开连接时:延时150ms 后重启,重新进入被搜索状态,等待主机配对
和连接。
>_<" 显示模块当前工作状态:
- 待机状态慢闪——重复2s 脉冲;
- 连接状态长亮——高电平。
1.4、AT指令集
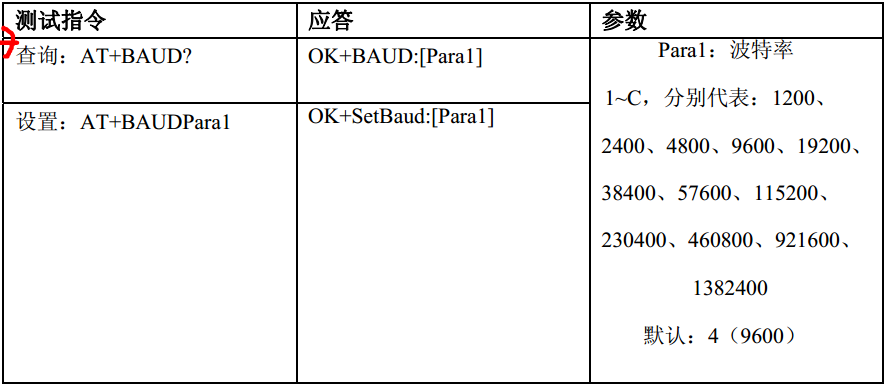
蓝牙模块出厂默认的串口配置为:波特率9600,无校验,数据位8,停止位1。
PS:接下来说明以上位机为电脑,模块参数为出厂设置时进行配置说明。
>_<" 将模块通过USB电平转换板连接到电脑USB口(USB转TTL),使用串口调试助手,按
照 9600,N,8,1 进行配置,打开串口后,发送 AT(无\r\n),若返回 OK,说明配置
成功。
PS:设置 AT 指令必须在蓝牙模块未连接或断开 SPP 链接时才可以(上电或配对
后都可以,如果连接 SPP,串口输入的数据将会直接发送到远端蓝牙设备串口)
1.4.1、测试指令:

1.4.2、查询\设置波特率指令:
1.4.3、查询\设置设备名称指令:

1.4.4、恢复默认设置指令:

1.4.5、模块复位\重启指令:

1.4.6、查询\设置主从模式:

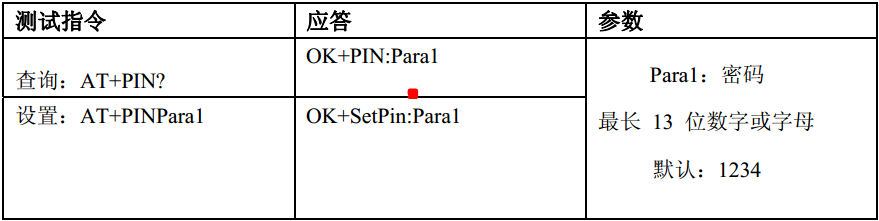
1.4.7、查询\设置配对密码:
1.4.8、查询\设置是否需要密码鉴权:

PS:为方便使用,默认为不用密码鉴权连接,搜索到蓝牙串口之后,直接连接
可。有安全考虑的客户请选择需要密码鉴权。
PS:此指令只有在从设备时才有效;主设备时不接受此指令,发送此指令没
有回复,也不执行
1.4.9、清除主设备配对信息指令:

PS:此指令只有在主设备时才有效;从设备时不接受此指令,发送此指令
没有回复,也不执行。
1.4.10、搜索并连接新的蓝牙串口从设备(*)指令:

PS:此指令只有在主设备时才有效;从设备时不接受此指令,发送此指令没
有回复,也不执行。
1.4.11、连接最后一次连接的蓝牙串口从设备(*)指令:

PS:此指令只有在主设备时才有效;从设备时不接受此指令,发送此指令没
有回复,也不执行。
1.4.12、连接指定蓝牙地址的从设备(*)指令:

PS:此指令只有在主设备时才有效;从设备时不接受此指令,发送此指令没
有回复,也不执行。
1.4.13、查询、设置软件版本指令:

1.4.14、系统帮助指令:

1.4.15、查询本机MAC 地址指令:

>_<: 1:所有参数设置后存储在模块内,下次启动时无需再次设置
2:AT 指令后标注*号的,表示目前未应用的AT 指令
二、蓝牙模块配置与笔记本电脑相连
2.1.1、蓝牙初始化配置:
将蓝牙模块通过TTL转USB模块连接到笔记本,打开串口助手,通过上述AT指令设置为从设备,波特率为9600,然后重启
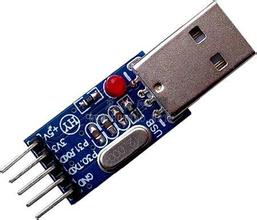 [图:USB转TTL模块]
[图:USB转TTL模块]
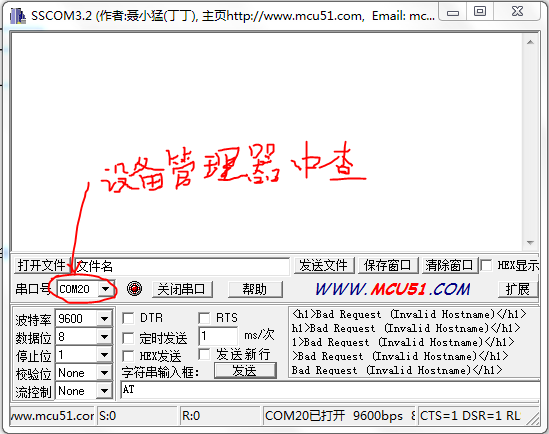 [图:串口助手]
[图:串口助手]
2.1.2、电脑为主设备搜索建立连接:
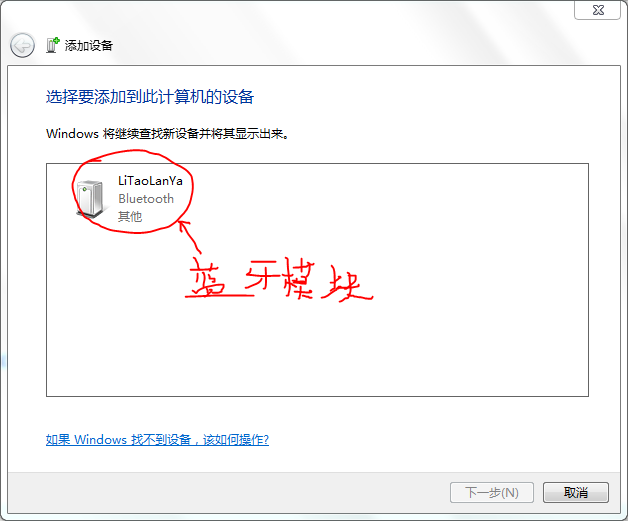
点击笔记本蓝牙标志的小图标,添加蓝牙设备:

然后要等一会,笔记本正在装驱动:
然后右击蓝牙图标,查看蓝牙设备,可见我们的设备已经被电脑发现并添加:

查看该设备属性,此时笔记本为该设备提供一个串口,就是笔记本蓝牙和设备蓝牙通信的通道,要记住这个一会编程的时候会用到:

PS:这个COM15也可以在设备管理器中修改为其他通道
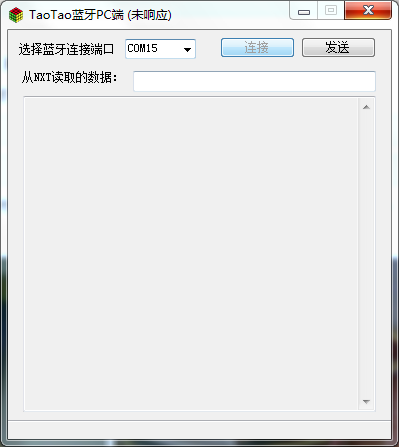
三、C#编程使笔记本蓝牙和外部设备蓝牙通信:
其实配对以后,蓝牙就被模拟成了一个端口,我们可以用最简单的端口通讯来收发信息。首先,在每次启动时,需要连接端口:
[FORM初始化时获取所有的COM口,并加入下拉列表]
- public Form1()
- {
- InitializeComponent();
- //Get all port list for selection
- //获得所有的端口列表,并显示在列表内
- PortList.Items.Clear();
- string[] Ports = SerialPort.GetPortNames();
- for (int i = ; i < Ports.Length; i++)
- {
- string s = Ports[i].ToUpper();
- Regex reg = new Regex("[^COM\\d]", RegexOptions.IgnoreCase | RegexOptions.Multiline);
- s = reg.Replace(s, "");
- PortList.Items.Add(s);
- }
- if (Ports.Length > ) PortList.SelectedIndex = ;
- }
[连接按钮事件:选中list中的被选中的COM口进行连接,如果连接成功就在状态栏显示蓝牙连接成功]
- private void ConnectButton_Click(object sender, EventArgs e)
- {
- if (!BluetoothConnection.IsOpen)
- {
- //Start
- Status = "正在连接蓝牙设备";
- BluetoothConnection = new SerialPort();
- ConnectButton.Enabled = false;
- BluetoothConnection.PortName = PortList.SelectedItem.ToString();
- BluetoothConnection.Open();
- BluetoothConnection.ReadTimeout = ;
- BluetoothConnection.DataReceived += new SerialDataReceivedEventHandler(BlueToothDataReceived);
- Status = "蓝牙连接成功";
- }
- }
[蓝牙接收数据事件响应函数,在按钮连接事件中声明的该事件,用于响应蓝牙数据接收]
- private void BlueToothDataReceived(object o, SerialDataReceivedEventArgs e)
- {
- //int length = BluetoothConnection.ReadByte();
- Thread.Sleep();
- int length = ;
- BlueToothReceivedData = DateTime.Now.ToLongTimeString() + "\r\n";
- BlueToothReceivedData += "收到字节数:" + length + "\r\n";
- byte[] data = new byte[length];
- BluetoothConnection.Read(data,,length);
- for (int i = ; i < length; i++)
- {
- BlueToothReceivedData += string.Format("data[{0}] = {1}\r\n", i, data[i]);
- }
- //receive close message
- if (length == && data[] == && data[] == && data[] == )
- {
- //Stop
- Status = "正在断开蓝牙设备";
- BluetoothConnection.Close();
- BluetoothConnection.Dispose();
- BluetoothConnection = null;
- ConnectButton.Enabled = true;
- Status = "蓝牙断开成功";
- }
- }
- 这里第4行让程序休息1是因为延时等待从设备把数据发送完全。
- 这里为了方便我严格控制让发送数据为13Byte。
- 从设备发送的13Byte数据送至缓冲区,PC端C#程序通过read()函数将缓冲区数据接收到data中,下面是格式输出一下数据。
[发送数据函数]
- private void BlueToothDataSend(byte[] data)
- {
- //int length = data.Length;
- //byte[] readData = new byte[length + 2];
- //readData[0] = (byte)(length % 255);
- //readData[1] = (byte)(length / 255);
- //for (int i = 0; i < length; i++)
- //{
- // readData[i + 2] = data[i];
- //}
- //BluetoothConnection.Write(readData, 0, length + 2);
- BluetoothConnection.Write(data, , );
- //Status = "发送数据字节数:" + length;
- }
- 本来是将data[]数据发送出去,因为我从设备设置为只要有数据发送过来就做出响应发送13Byte数据,所以就直接将data的第一byte发送出去了。
[定时器函数:用于刷新状态栏,和接收数据显示]
- private void MonitorTimer_Tick(object sender, EventArgs e)
- {
- StatusMessage.Text = Status;
- BlueToothMessage.Text = BlueToothReceivedData;
- }
[发送数据按钮:将SendMessage中的数据获得发送出去]
- private void SendButton_Click(object sender, EventArgs e)
- {
- byte n;
- byte.TryParse(SendMessage.Text, out n);
- BlueToothDataSend(new byte[] { n });
- }
四、PC和51单片机通过蓝牙连接展示
4.1.1、51单片机部分程序
一定要用11.0952Mhz的晶振,我用12Mhz结果出现帧丢失!其实这里采用的是52单片机,在此处区别不是很大~
将蓝牙模块的RXD连接单片机的RXD(P3.0),TXD连接单片机的TXD(P3.1),然后就像以前操作串口一样操作就行啦~
- #include <REG52.H>
- #include <INTRINS.H>
- typedef unsigned char uchar;
- typedef unsigned short ushort;
- typedef unsigned int uint;
- sbit SCL=P1^; //IIC时钟引脚定义
- sbit SDA=P1^; //IIC数据引脚定义
- #define SlaveAddress 0xD0 //IIC写入时的地址字节数据,+1为读取
- //**************************************
- //延时5微秒(STC90C52RC@12M)
- //不同的工作环境,需要调整此函数
- //当改用1T的MCU时,请调整此延时函数
- //**************************************
- void Delay5us()
- {
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();
- }
- //**************************************
- //I2C起始信号
- //**************************************
- void I2C_Start()
- {
- SDA = ; //拉高数据线
- SCL = ; //拉高时钟线
- Delay5us(); //延时
- SDA = ; //产生下降沿
- Delay5us(); //延时
- SCL = ; //拉低时钟线
- }
- //**************************************
- //I2C停止信号
- //**************************************
- void I2C_Stop()
- {
- SDA = ; //拉低数据线
- SCL = ; //拉高时钟线
- Delay5us(); //延时
- SDA = ; //产生上升沿
- Delay5us(); //延时
- }
- //**************************************
- //I2C发送应答信号
- //入口参数:ack (0:ACK 1:NAK)
- //**************************************
- void I2C_SendACK(bit ack)
- {
- SDA = ack; //写应答信号
- SCL = ; //拉高时钟线
- Delay5us(); //延时
- SCL = ; //拉低时钟线
- Delay5us(); //延时
- }
- //**************************************
- //I2C接收应答信号
- //**************************************
- bit I2C_RecvACK()
- {
- SCL = ; //拉高时钟线
- Delay5us(); //延时
- CY = SDA; //读应答信号
- SCL = ; //拉低时钟线
- Delay5us(); //延时
- return CY;
- }
- //**************************************
- //向I2C总线发送一个字节数据
- //**************************************
- void I2C_SendByte(uchar dat)
- {
- uchar i;
- for (i=; i<; i++) //8位计数器
- {
- dat <<= ; //移出数据的最高位
- SDA = CY; //送数据口
- SCL = ; //拉高时钟线
- Delay5us(); //延时
- SCL = ; //拉低时钟线
- Delay5us(); //延时
- }
- I2C_RecvACK();
- }
- //**************************************
- //从I2C总线接收一个字节数据
- //**************************************
- uchar I2C_RecvByte()
- {
- uchar i;
- uchar dat = ;
- SDA = ; //使能内部上拉,准备读取数据,
- for (i=; i<; i++) //8位计数器
- {
- dat <<= ;
- SCL = ; //拉高时钟线
- Delay5us(); //延时
- dat |= SDA; //读数据
- SCL = ; //拉低时钟线
- Delay5us(); //延时
- }
- return dat;
- }
- //**************************************
- //向I2C设备写入一个字节数据
- //**************************************
- void Single_WriteI2C(uchar REG_Address,uchar REG_data)
- {
- I2C_Start(); //起始信号
- I2C_SendByte(SlaveAddress); //发送设备地址+写信号
- I2C_SendByte(REG_Address); //内部寄存器地址,
- I2C_SendByte(REG_data); //内部寄存器数据,
- I2C_Stop(); //发送停止信号
- }
- //**************************************
- //从I2C设备读取一个字节数据
- //**************************************
- uchar Single_ReadI2C(uchar REG_Address)
- {
- uchar REG_data;
- I2C_Start(); //起始信号
- I2C_SendByte(SlaveAddress); //发送设备地址+写信号
- I2C_SendByte(REG_Address); //发送存储单元地址,从0开始
- I2C_Start(); //起始信号
- I2C_SendByte(SlaveAddress+); //发送设备地址+读信号
- REG_data=I2C_RecvByte(); //读出寄存器数据
- I2C_SendACK(); //接收应答信号
- I2C_Stop(); //停止信号
- return REG_data;
- }
I2C.c
- // GY-52 MPU6050 IIC测试程序
- // 使用单片机STC89C51
- // 晶振:11.0592M
- // 编译环境 Keil uVision2
- #include <REG52.H>
- #include <math.h> //Keil library
- #include <stdio.h> //Keil library
- typedef unsigned char uchar;
- typedef unsigned short ushort;
- typedef unsigned int uint;
- uchar usart_flag,receive_data;//串口中断接收标志和串口接收数据
- //****************************************
- // 定义MPU6050内部地址
- //****************************************
- #define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)
- #define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)
- #define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
- #define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz)
- #define ACCEL_XOUT_H 0x3B
- #define ACCEL_XOUT_L 0x3C
- #define ACCEL_YOUT_H 0x3D
- #define ACCEL_YOUT_L 0x3E
- #define ACCEL_ZOUT_H 0x3F
- #define ACCEL_ZOUT_L 0x40
- #define TEMP_OUT_H 0x41
- #define TEMP_OUT_L 0x42
- #define GYRO_XOUT_H 0x43
- #define GYRO_XOUT_L 0x44
- #define GYRO_YOUT_H 0x45
- #define GYRO_YOUT_L 0x46
- #define GYRO_ZOUT_H 0x47
- #define GYRO_ZOUT_L 0x48
- #define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用)
- #define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读)
- //****************************************
- //函数声明
- //****************************************
- void delay(unsigned int k); //延时
- void SeriPushSend(uchar send_data); //串口发送函数
- void InitMPU6050(); //陀螺仪初始化
- int GetData(uchar REG_Address); //合成数据并发送原数据
- void init_uart(); //串口初始化
- void SeriPushSend(uchar send_data); //串口发送函数
- extern uchar Single_ReadI2C(uchar REG_Address); //读取I2C数据
- extern void Single_WriteI2C(uchar REG_Address,uchar REG_data); //向I2C写入数据
- //****************************************
- //延时
- //****************************************
- void delay(unsigned int k)
- {
- unsigned int i,j;
- for(i=;i<k;i++)
- {
- for(j=;j<;j++);
- }
- }
- //**************************************
- //初始化MPU6050
- //**************************************
- void InitMPU6050()
- {
- Single_WriteI2C(PWR_MGMT_1, 0x00); //解除休眠状态
- Single_WriteI2C(SMPLRT_DIV, 0x07);
- Single_WriteI2C(CONFIG, 0x06);
- Single_WriteI2C(GYRO_CONFIG, 0x18);
- Single_WriteI2C(ACCEL_CONFIG, 0x01);
- }
- //**************************************
- //合成数据并发送原数据
- //**************************************
- int GetData(uchar REG_Address)
- {
- uchar H,L;
- H=Single_ReadI2C(REG_Address);
- L=Single_ReadI2C(REG_Address+);
- SeriPushSend(H);//发送出去
- SeriPushSend(L);
- return (H<<)+L; //合成数据
- }
- //**************************************
- //串口初始化
- //**************************************
- void init_uart()
- {
- TMOD=0x20; //设置T1定时器工作方式2
- TH1=0xfd; //T1装初值
- TL1=0xfd;
- TR1=; //启动T1定时器
- REN=; //允许串口中断接收
- SM0=; //设置串口工作方式
- SM1=;
- EA=; //开总中断
- ES=; //开串口中断
- }
- //****************************************
- //串口发送函数
- //****************************************
- void SeriPushSend(uchar send_data)
- {
- SBUF=send_data;
- while(!TI);TI=;
- }
- //****************************************
- //串口接收函数
- //****************************************
- void ser()interrupt
- {
- RI=;
- receive_data=SBUF;
- usart_flag=;
- }
- //*********************************************************
- //主程序
- //*********************************************************
- void main()
- {
- delay(); //上电延时
- init_uart();
- InitMPU6050(); //初始化MPU6050
- delay();
- while()
- {
- if(usart_flag==) //有数据传过来
- {
- ES=; //关闭串口中断
- SeriPushSend(0xff);
- GetData(ACCEL_XOUT_H); //发送X轴加速度
- GetData(ACCEL_YOUT_H); //发送Y轴加速度
- GetData(ACCEL_ZOUT_H); //发送Z轴加速度
- GetData(GYRO_XOUT_H); //发送X轴角速度
- GetData(GYRO_YOUT_H); //发送Y轴角速度
- GetData(GYRO_ZOUT_H); //发送Z轴角速度
- ES=;
- usart_flag=;
- }
- }
- }
main.c
因为我还在P1.0和P1.1连接一个陀螺仪MPU6050所以上面的代码有点烦,其实可以参考一下我以前发的51单片机串口通信~
http://www.cnblogs.com/zjutlitao/p/3788696.htm


4.1.2、没有51单片机的情况
可以将蓝牙模块连接在USB转TTL上,用串口助手和你写的C#程序相互通信。
4.1.3、运行C#程序进行连接通信
[选择刚才的那个蓝牙端口点击连接]
[第一次蓝牙图标会给出一个验证提示:在验证框内输入AT指令配置时的你设置的验证码]

[然后就可以通信啦,如下:]

PS:相关代码及资料
C#蓝牙工程代码:http://pan.baidu.com/s/1hqHwG4W
51蓝牙工程代码:http://pan.baidu.com/s/1dDqywVZ
蓝牙模块说明书:http://pan.baidu.com/s/1kT61nx1
C#蓝牙相关博客链接:http://www.diy-robots.com/?p=410%20%E8%93%9D%E7%89%99
[C#] 编程控制笔记本蓝牙与外部蓝牙设备通信的更多相关文章
- Delphi - 利用DLL编程控制摄像头实现拍照、录制视频
Delphi利用avicap32.dll编程控制摄像头实现拍照.录制视频 项目需求:平板电脑(Windows系统)一维/二维码扫描功能: 需求分析: 需要扫描一维/二维码时,分两步实现. 第一步,av ...
- 初探Lambda表达式/Java多核编程【0】从外部迭代到内部迭代
开篇 放假前从学校图书馆中借来一本书,Oracle官方的<精通Lambda表达式:Java多核编程>. 假期已过大半才想起来还没翻上几页,在此先推荐给大家. 此书内容及其简洁干练,如果你对 ...
- 利用Delphi编程控制摄像头(图)
你的电脑有没有摄像头?看到别人用QQ玩视屏你会不会去想怎么实现的?这里介绍使用DELPHI使用MS的 AVICAP32.DLL就可轻松的实现对摄像头编程,如果再加上你的网络编程水平,实现一个视屏聊天就 ...
- Acer笔记本蓝牙功能不可用
在电脑运行过程中,本应该如下所存在的蓝牙图标不存在了: 打开设置,本应该可以选择开关的蓝牙开关按钮也不存在了: 电脑的蓝牙功能无法使用: 处理方法: 在C:\windows\sysytem32\文件夹 ...
- Shell编程—控制脚本
1处理信号 1.1信号表 编号 信号名称 缺省操作 解释 1 SIGHUP Terminate 挂起控制终端或进程 2 SIGINT Terminate 来自键盘的中断 3 SIGQUIT Dump ...
- Java知识系统回顾整理01基础05控制流程07结束外部循环
一.break是结束当前循环 二.结束当前循环实例 break; 只能结束当前循环 public class HelloWorld { public static void main(String[] ...
- Team Foundation API - 编程控制文件版本
Team Foundation Server (TFS)工具的亮点之一是文件的版本控制.在TFS中实现文件版本控制的类型: Microsoft.TeamFoundation.Client.TfsTea ...
- C#socket编程之实现一个简单的TCP通信
TCP(TransmissionControl Protocol)传输控制协议. 是一种可靠的.面向连接的协议(eg:打电话).传输效率低全双工通信(发送缓存&接收缓存).面向字节流.使用TC ...
- Java并发编程的艺术(六)——线程间的通信
多条线程之间有时需要数据交互,下面介绍五种线程间数据交互的方式,他们的使用场景各有不同. 1. volatile.synchronized关键字 PS:关于volatile的详细介绍请移步至:Java ...
随机推荐
- 在本地机器上能访问tomcat,远程机器访问不了的解决方法
问题描述:在测试服务器上搭建了一个tomcat,在测试服务器上能用ip打开tomcat.我用自己的机器能远程桌面能登录到测试服务器上,但在自己的机器上无法通过ip来访问测试服务器上的tomcat. 解 ...
- PHP生成静态页
代码如下: <? function makedir($mudir) //创建目录 { $file = "./$mudir"; @mkdir($file,07 ...
- hdu 2196 computer
Computer Time Limit: 1000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Total Su ...
- HDU 3775 Chain Code ——(Pick定理)
Pick定理运用在整点围城的面积,有以下公式:S围 = S内(线内部的整点个数)+ S线(线上整点的个数)/2 - 1.在这题上,我们可以用叉乘计算S围,题意要求的答案应该是S内+S线.那么我们进行推 ...
- jstl的一些用法
<jsp:useBean id="personBean" class="com.servlet.PersonInfo"></jsp:useBe ...
- 转 对菜鸟开发者的叮咛:花一万个小时练习Coding,不要浪费一万小时无谓地Debugging
原文见http://blog.jobbole.com/74825/ Coding 之于科技的重要性不言可喻,也不再是软体工程师的专利,医师.律师.会计师.护理师.金融从业人员,甚至是听起来摸不着边的政 ...
- vsftpd基于pam_mysql的虚拟用户机制
何为vsftpd? vsftpd:very secure ftp daemon 程序:/usr/sbin/vsftpd 配置文件:/etc/vsftpd/vsftpd.conf 其用户分为:匿名用户( ...
- iOS工作笔记(十三)
1.automaticallyAdjustsScrollViewInsets的使用 这是UIViewController的属性,设置为YES就是根据status bar,navigation bar, ...
- js判断用户是否禁用了cookie
function CookieEnable() { var result = false; if (navigator.cookiesEnabled) return true; document.co ...
- 防止刷新/后退引起的重复提交问题的Java Token代码,非Struts
贴子转自http://hi.baidu.com/bobylou,转之前并没有验证文章里的方法是不是有效,估计原作者把它放到blog之前应该做过测试了吧. Struts本身有一套完善的防止重复提交表单的 ...