HTML5 + WebGL 实现的垃圾分类系统
前言
垃圾分类,一般是指按一定规定或标准将垃圾分类储存、分类投放和分类搬运,从而转变成公共资源的一系列活动的总称。分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用。垃圾在分类储存阶段属于公众的私有品,垃圾经公众分类投放后成为公众所在小区或社区的区域性准公共资源,垃圾分类搬运到垃圾集中点或转运站后成为没有排除性的公共资源。从国内外各城市对生活垃圾分类的方法来看,大致都是根据垃圾的成分、产生量,结合本地垃圾的资源利用和处理方式来进行分类的。到2019年6月25日,生活垃圾分类制度将入法。一套应用于工业物联网的智能一体化的垃圾分类机械臂将随之而来,由此,我应用 HT for Web 的图型化编辑工具打造了一款形象生动的例子:Garbage classification,也借此机会与大家一起分享和学习。
代码实现
(注:gif 的上传大小有限,实际效果与还请参考 demo 链接)
首先,我应用已经精心布置好的 3D 场景,为了有更好的操作体验感,我们要从它的基本设置开始:

gv.setMovableFunc(() => { return false }) // 禁止拖动
gv.getWireframe = (d) => { d.s('wf.visible', false) } // 隐藏选中边框
gv.setEye([583, -212, -789]) // 设置眼睛
gv.setCenter([-76, -654, -133]) // 设置中心点
gv.setFar(100000) // 设置远端位置
gv.setNear(10) // 设置近端位置
gv.setInteractors([ new ht.graph3d.MapInteractor(gv) ]) // 设置交互限制
gv.setSkyBox(dm.getDataByTag('skyBox')) // 设置天空球
window.document.oncontextmenu = () => { return false } // 全局设置右键菜单禁用
gv.scene = { // 复制初始位置
eye: ht.Default.clone(gv.getEye()),
center: ht.Default.clone(gv.getCenter()),
far: ht.Default.clone(gv.getFar()),
near: ht.Default.clone(gv.getNear()),
}
我复制了一下整个场景的初始视角情况方便我做稍后的处理,我监听了部分鼠标事件来形成自己的操作风格(比如双击背景还原视角以及双击模型拉近视角):
gv.mi(e => {
let data = e.data
let kind = e.kind
if (kind === 'doubleClickBackground') { // 双击背景
gv.moveCamera(this.gv.scene.eye, this.gv.scene.center, {duration : 1000}) // 恢复视角
}
else if (kind === 'doubleClickData') { // 双击模型
gv.flyTo(data, {animation : {duration : 500}, distance : 800}) // 拉近视角
}
})
好了,准备工作做好了,下面来实现动画部分,除了了解 垃圾分类 的方式外我还参考了网上很多机械臂的视频,学习它的运动模式和动作细节,对每个结构和部位的动画进行步骤的排序和构思。这里我挑选几处动画的实现方式来展示:
function mechanicalArmAnim1() {
ht.Default.startAnim({
duration: 1000,
easing: (t) => { return t },
action: (v, t) => {
postbrachium.r3(degrees(0) + (degrees(20) - degrees(0)) * v, postbrachium.r3()[1], postbrachium.r3()[2]) // 后臂向下移
},
finishFunc: () => {
setTimeout(() => {
mechanicalArmAnim2()
}, 300)
}
})
}
function mechanicalArmAnim2() {
ht.Default.startAnim({
duration: 1000,
easing: (t) => { return t },
action: (v, t) => {
postbrachium.p3(-208 + (-184 + 208) * v, postbrachium.p3()[1], postbrachium.p3()[2]) // 后臂前伸
hydraulicRod1.r3(degrees(0) + (degrees(8) - degrees(0)) * v, hydraulicRod1.r3()[1], hydraulicRod1.r3()[2]) // 液压杆1倾斜
extensionRod1.r3(degrees(0) + (degrees(8) - degrees(0)) * v, extensionRod1.r3()[1], extensionRod1.r3()[2]) // 伸长杆1倾斜
extensionRod1.p3(-169 + (-185 + 169) * v, -516 + (-511 + 516) * v, extensionRod1.p3()[2]) // 伸长杆1伸长
hydraulicRod2.r3(degrees(0) + (degrees(-8) - degrees(0)) * v, hydraulicRod2.r3()[1], hydraulicRod2.r3()[2]) // 液压杆2倾斜
extensionRod2.r3(degrees(0) + (degrees(-8) - degrees(0)) * v, extensionRod2.r3()[1], extensionRod2.r3()[2]) // 伸长杆2倾斜
extensionRod2.p3(-169 + (-185 + 169) * v, -516 + (-511 + 516) * v, extensionRod2.p3()[2]) // 伸长杆2伸长
},
finishFunc: () => {
setTimeout(() => {
mechanicalArmAnim3()
}, 300)
}
})
}
function mechanicalArmAnim3() {
let oldValue = antebrachium.r3()[0]
ht.Default.startAnim({
duration: 1000,
easing: (t) => { return t },
action: (v, t) => {
hydraulicRod1.r3(degrees(8) + (degrees(7) - degrees(8)) * v, hydraulicRod1.r3()[1], hydraulicRod1.r3()[2]) // 液压杆1倾斜
extensionRod1.r3(degrees(8) + (degrees(7) - degrees(8)) * v, extensionRod1.r3()[1], extensionRod1.r3()[2]) // 伸长杆1倾斜
extensionRod1.p3(-185 + (-186 + 185) * v, -511 + (-507 + 511) * v, extensionRod1.p3()[2]) // 伸长杆1伸长
hydraulicRod2.r3(degrees(-8) + (degrees(-7) - degrees(-8)) * v, hydraulicRod2.r3()[1], hydraulicRod2.r3()[2]) // 液压杆2倾斜
extensionRod2.r3(degrees(-8) + (degrees(-7) - degrees(-8)) * v, extensionRod2.r3()[1], extensionRod2.r3()[2]) // 伸长杆2倾斜
extensionRod2.p3(-185 + (-186 + 185) * v, -511 + (-507 + 511) * v, extensionRod2.p3()[2]) // 伸长杆2伸长
postbrachium.r3(degrees(20) + (degrees(25) - degrees(20)) * v, postbrachium.r3()[1], postbrachium.r3()[2]) // 后臂向下移
antebrachium.r3(oldValue + (degrees(-40) - oldValue) * v, antebrachium.r3()[1], antebrachium.r3()[2]) // 前臂向下移
claw1.r3(degrees(-20) + (degrees(-60) - degrees(-20)) * v, claw1.r3()[1], claw1.r3()[2]) // 上爪抓取
claw2.r3(degrees(-60) + (degrees(-30) - degrees(-60)) * v, claw2.r3()[1], claw2.r3()[2]) // 下爪抓取
},
finishFunc: () => {
mechanicalArmAnim4()
}
})
}
这一段动画是机械臂从初始化状态到向下抓取的一个过程,我将每段动画分成函数来写比较方便后续管理,每一处也代表了一个步骤。这其中最复杂且细微的步骤要数液压杆的运动了,为了让动画看起来更加真实,我除了将手臂单独运动的过程中加入了延时执行下一段动画以体现机器运动的特点外,也把液压杆的部分也做了动画,如果不做处理,那么机械臂在上下移动的时候就会有不科学的效果出现。动画函数 在这种 demo 中应用的最广,而且里面也包含了一些缓动函数,有兴趣的博友们可以 点此处 自己亲自动手玩一玩~
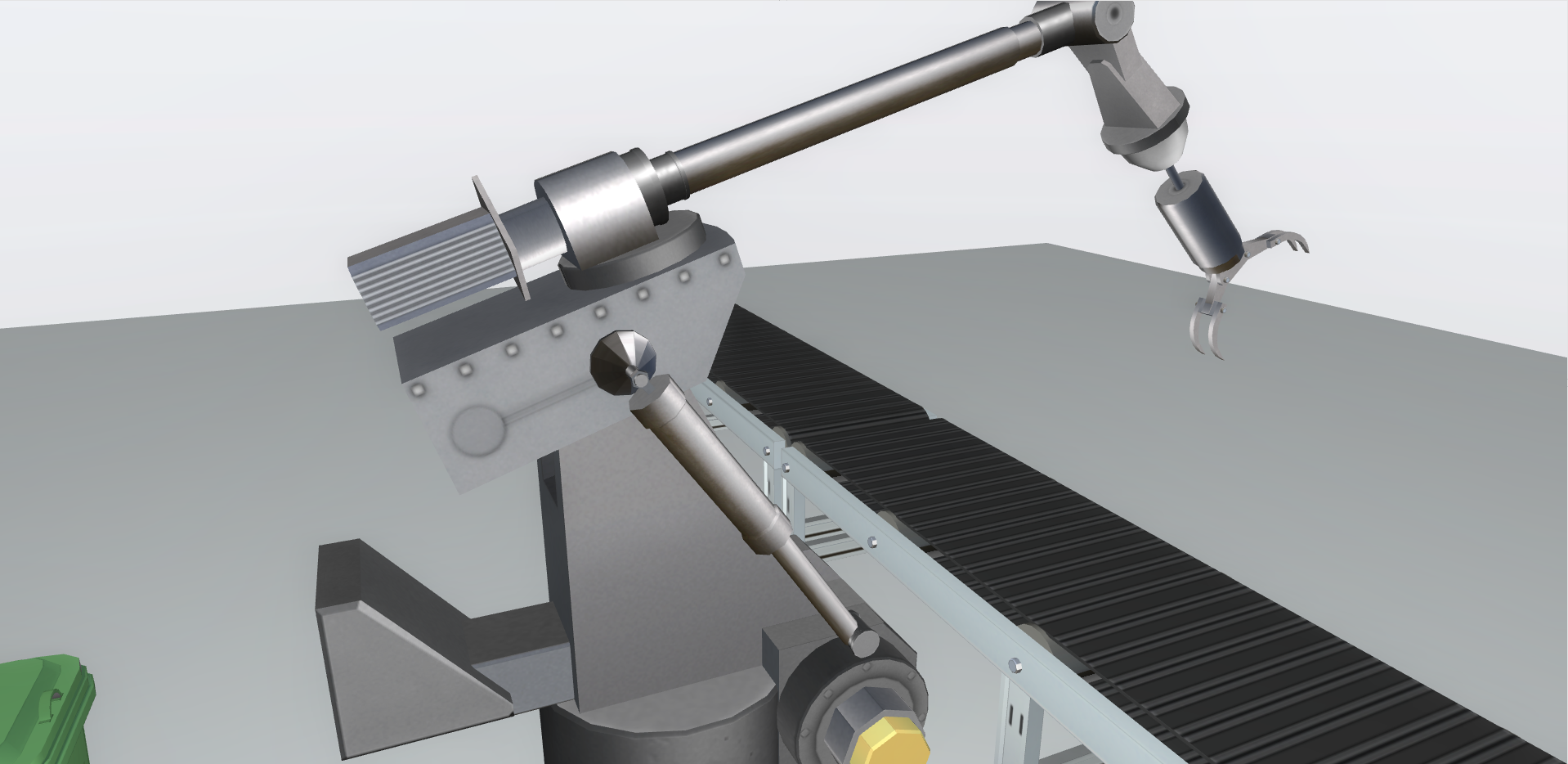
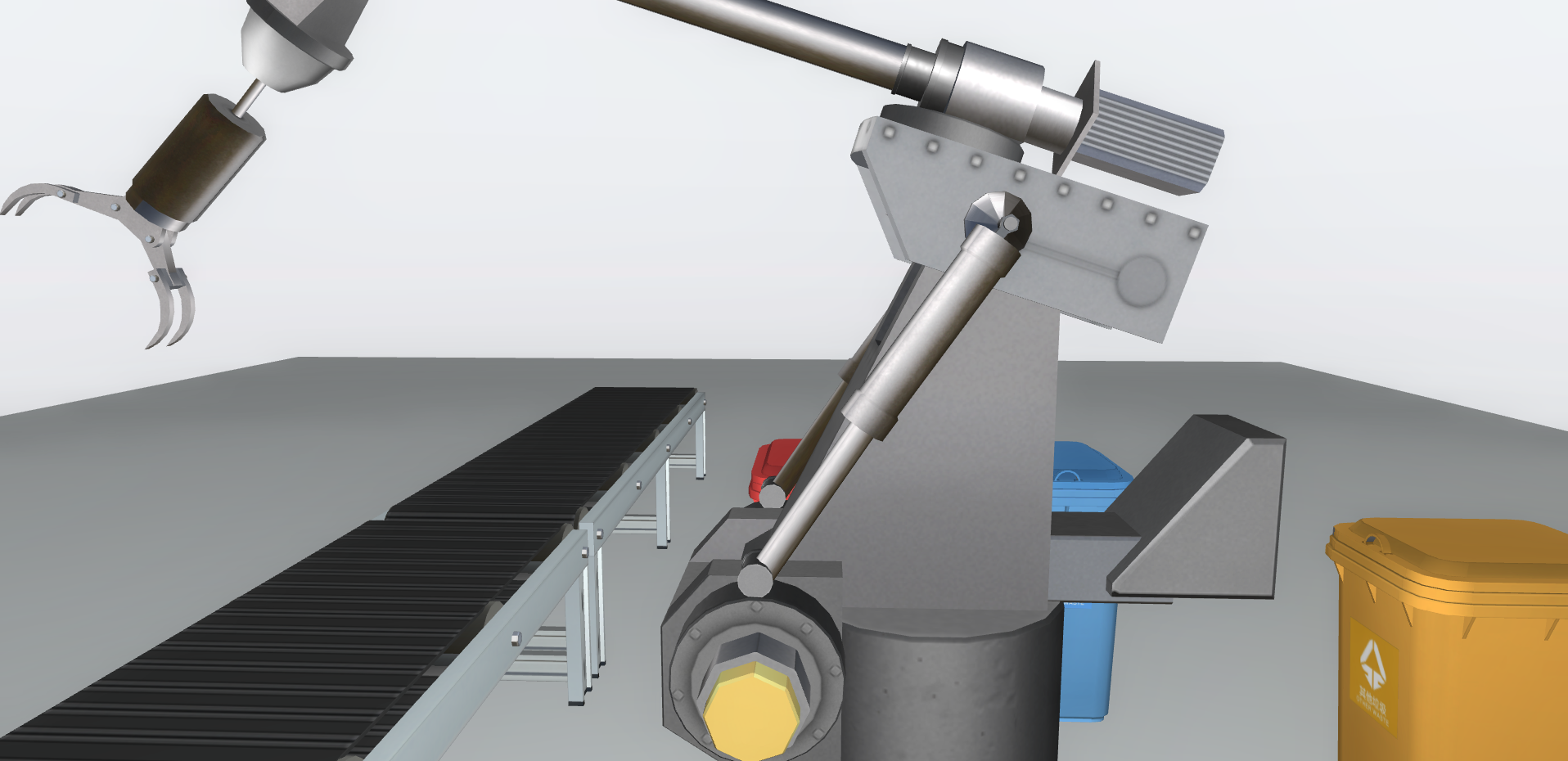
这里面的拾取垃圾步骤还应用了我过去介绍过的 吸附 功能,这个方法非常的适合抓取物体的动作,通过 setHost 使节点吸附于宿主,这样就相当于子节点跟随父节点移动,此时只需要对机械臂进行偏移和旋转的操作,垃圾便会随之一起运动了,大大减少了工作量!
还有一部分更酷的属性设置给大家展示一下,可以让 3D 场景整体有更真实的阴影处理效果。首先我们要注意将无关的节点阴影通过 node.s('shadow.cast', false) 关闭,比如编组用的box,背景,地板和面板等。
最后我们就把阴影的细节做下调整,达到比较好的效果:
gv.enableShadow(true, {
degreeX : 0, // 投影 x 轴角度
degreeZ : -25, // 投影 z 轴角度
intensity : 0.3, // 阴影强度, 1 为黑色
quality : 'high', // low / medium / high / ultra / 4096数值, 质量
type : 'soft', // none / hard / soft
radius : 0.2, // type 为 hard / soft 时,补充的边缘厚度,用来提供更柔和的边缘
bias : -0.003 // 深度浮点偏差补足
})
总结
更多动画 demo 以及工业化领域的文章请继续关注我的博客,感谢大家的支持!
医疗站(https://www.cnblogs.com/htdaydayup/p/11558748.html)
在工业物联网从婴儿走到青年的成熟道路上,一定会有更多的潜力和挑战在等着我们,等待我们去开发,等待我们去创造!相信我们的技术成为国际水准会指日可待!同时在十一国庆后的第一个工作日祝大家精神饱满,工作顺利!
HTML5 + WebGL 实现的垃圾分类系统的更多相关文章
- 基于 HTML5 + WebGL 实现的垃圾分类系统
前言 垃圾分类,一般是指按一定规定或标准将垃圾分类储存.分类投放和分类搬运,从而转变成公共资源的一系列活动的总称.分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用.垃圾在分类储存阶段属于公众的私 ...
- 基于 HTML5 + WebGL 实现 3D 挖掘机系统
前言 在工业互联网以及物联网的影响下,人们对于机械的管理,机械的可视化,机械的操作可视化提出了更高的要求.如何在一个系统中完整的显示机械的运行情况,机械的运行轨迹,或者机械的机械动作显得尤为的重要,因 ...
- 基于 HTML5 WebGL 的楼宇智能化集成系统(一)
前言 随着现代通信技术.计算机技术.控制技术的飞速发展,智能建筑已经成为现代建筑发展的主流.智能建筑是以建筑物为平台,兼备信息设施系统.信息化应用系统.建筑设备管理系统.公共安全系统等.集 ...
- 基于 HTML5 WebGL 的 CPU 监控系统
前言 科技改变生活,科技的发展带来了生活方式的巨大改变.随着通信技术的不断演进,5G 技术应运而生,随时随地万物互联的时代已经来临.5G 技术不仅带来了更快的连接速度和前所未有的用户体验,也为制造业, ...
- 基于 HTML5 WebGL 的医疗物流系统
前言 物联网( IoT ),简单的理解就是物体之间通过互联网进行链接.世界上的万事万物,都可以通过数据的改变进行智能化管理.ioT 的兴起在医疗行业中具有拯救生命的潜在作用.不断的收集用户信息并且实时 ...
- 基于 HTML5 + WebGL 的 3D 太阳系系统
前言 近年来随着引力波的发现.黑洞照片的拍摄.火星上存在水的证据发现等科学上的突破,以及文学影视作品中诸如<三体>.<流浪地球>.<星际穿越>等的传播普及,宇宙空间 ...
- 基于 HTML5 WebGL 的楼宇智能化集成系统(二)
前言 一套完整的可视化操作交互上,必不可少 2D/3D 的融合,在上期我们介绍了有关 3D 场景的环视漫游.巡视漫游以及动画效果,还包括了冷站场景.热站场景以及智慧末端的实现原理,本期主要 ...
- 基于 HTML5 WebGL 的楼宇智能化集成系统(三)
前言 2018年7月,信息化部印发了<工业互联网平台建设及推广指南>和<工业互联网平台评价方法>,掀起了 工业互联网 的浪潮,并成为热词写入了报告中.同为信息发展下 ...
- 基于 HTML5 WebGL 的地铁站 3D 可视化系统
前言 工业互联网,物联网,可视化等名词在我们现在信息化的大背景下已经是耳熟能详,日常生活的交通,出行,吃穿等可能都可以用信息化的方式来为我们表达,在传统的可视化监控领域,一般都是基于 Web SCAD ...
随机推荐
- yzoj1657货仓选址 题解
题面: 在一条数轴上有N家商店,它们的坐标分别为 A[1]~A[N].现在需要在数轴上建立一家货仓,每天清晨,从货仓到每家商店都要运送一车商品.为了提高效率,求把货仓建在何处,可以使得货仓到每家商店的 ...
- [Swoole入门到进阶] [精选公开课] Swoole服务器-Server的四层生命周期
PHP 完整生命周期 执行PHP文件 PHP扩展模块初始化(MINIT) PHP扩展请求初始化(RINIT) 执行 PHP 逻辑 PHP扩展请求结束(RSHUTDOWN) PHP脚本清理 PHP扩展模 ...
- shell 菜单选择命令
devices=`adb devices | sed '1d;$d' | sed 's/device//g'` */sed '1d;$d' : 删除第一行和最后一行*/ device_ ...
- 使用EF6简实现多租户的应用
什么是多租户 网上有好多解释,有些上升到了架构设计,让你觉得似乎非常高深莫测,特别是目前流行的ABP架构中就有提到多租户(IMustHaveTenant),其实说的简单一点就是再每一张数据库的表中添加 ...
- JS-特效 ~ 04. client对象、网页可视区域的宽高、client / offset / scroll 三大家族的区别、冒泡事件、事件委托、获取内嵌式和外链式属性getStyle(ele,attr) ;、缓动动画封装
知识点: 模拟滚动条的解除事件问题 : event内置对象,包含 了大量事件: page兼容性: pageX || clientX + scool().top : if (true === a)tr ...
- 【Offer】[38] 【字符串的排列】
题目描述 思路分析 测试用例 Java代码 代码链接 题目描述 输入一个字符串,打印出该字符串中字符的所有排列.例如,输入字符串abc,则打印出由字符a.b.c所能排列出来的所有字符串abc.acb. ...
- Protostuff序列化问题
最近在开发中遇到一个Protostuff序列化问题,在这记录一下问题的根源:分析一下Protostuff序列化和反序列化原理:以及怎么样避免改bug. 1. 问题描述 有一个push业务用到了mq,m ...
- 计时器Chronometer
布局文件很简单 <Chronometer android:id="@+id/test" android:layout_width="wrap_content&quo ...
- Quartz技术原理
Quartz运行基本: (1) 创建任务jobDetail(放入具体的jobImpl),触发器trigger(保存job的触发策略),均放入调度器scheduler. (2) ...
- Java 内省(Introspector)和 BeanUtils
人生若只如初见,何事秋风悲画扇. 概述 内省(Introspector) 是Java 语言对 JavaBean 类属性.事件的一种缺省处理方法. JavaBean是一种特殊的类,主要用于传递数据信息, ...