[论文理解] FoveaBox: Beyond Anchor-based Object Detector
FoveaBox: Beyond Anchor-based Object Detector
Intro
本文是一篇one-stage anchor free的目标检测文章,大体检测思路为,网络分两路,一路预测k个channel的map,每个channel代表一个类别的概率,即输出为w×h×k,另一路预测位置,输出即为w×h×4。想法其实很容易想到,但是本文之所以work我认为很重要的一个trick是gt label的分配,positive area和negative area,回归是预测log偏移,。
我本来看了abstract之后以为是预测whk的label map,然后根据这个map上某个类别的分布去确定框,然后利用这里的信息去修正框的位置。然后看了图发现是两路预测,我直观感觉他可以合并成一路,其中cls map作为中间层输出,或者是回归支路利用上cls map的信息。
Method
Backbone是FPN,FPN的每层后面接一个subnet,subnet分为两路分别去预测cls map和回归位置。
如图所示就是大体结构:
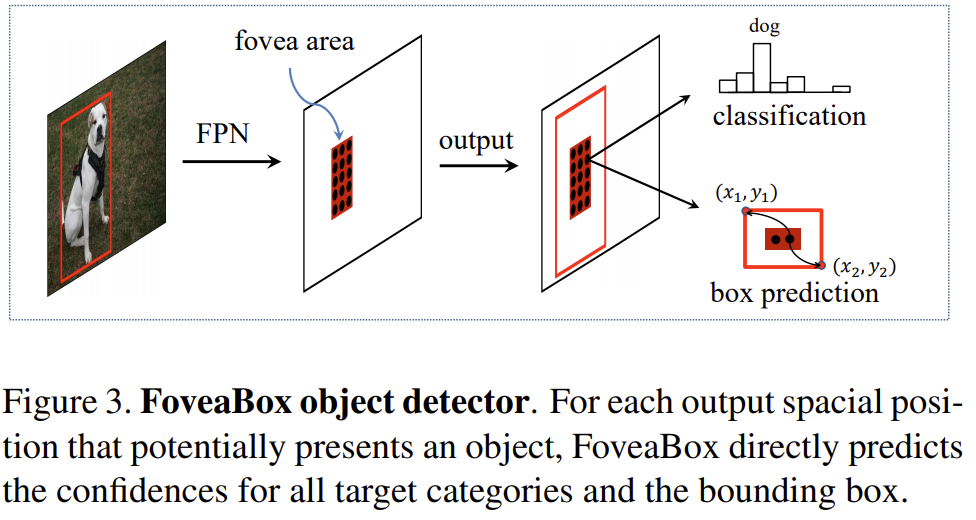
这就是本文的想法,那么有了这个想法,下一个问题就是怎么训练,哪些位置我要分配为参与训练的样本,如何分配?
作者的想法就是,首先gt在特征图上映射了一个区域,这个区域向内缩放得到一个小box认为是正样本,对应一个类别,这个区域向外放大得到一个大box,大box和小box之内认为是困难样本不参与训练,大box之外认为就是负样本,所以正样本的数量往往是比较小的,可能就那么几个点被分为正样本,取决于缩放的系数。
公式为:
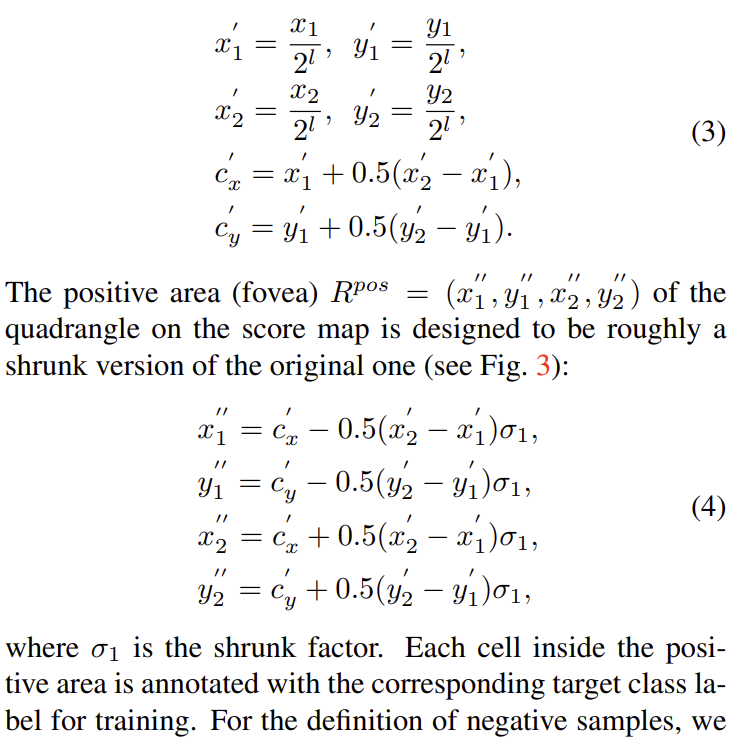
l是fpn的层index。公式3就是将gt映射到对应fpn层的feature map,然后求出映射后的box的中心c,公式4就是进行缩放和扩增的操作,以确定正负样本。
上面分类说完了,然后就是回归,
回归转换为根据feature map上一点对应层和对应的xy方向index映射到原图上,与gt做差之后变换,网络学习到的是一种变换。由公式5可见x、y其实是在特征图上的位置,然后除以尺度z取log使网路更容易学习到目标。
网络学习到的就是t。
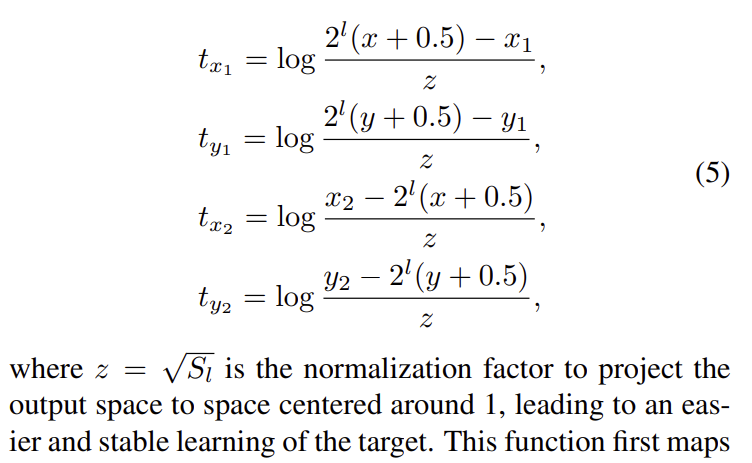
加0.5可以防止出现log0.
思考
- FoveaBox是两路预测的,如我上面说的,能否一路完成,假设我们先训练cls map,那么当cls map确定了,其实理论上可以帮助loc框定位的学习的。所以思考是否可以将cls map和feature同时作为loc层的输入,两个信息结合来帮助回归框的学习。
- 关于标签的分配作者是采用了一个系数进行缩放和放大划分,能否使用正态分布对label进行分配,靠近中间概率接近1,靠近旁边概率减小,一定阈值以外认为是负样本。
- 可否换一种回归方式,比如年龄识别中用的coarse-to-fine的stage-wise-regression方式来回归框,比如一个框的坐标值121 可以由三个不同粒度的值相加得到,121 = 100 + 20 + 1。
[论文理解] FoveaBox: Beyond Anchor-based Object Detector的更多相关文章
- [论文理解] Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks 简介 Faster R-CNN是很经典的t ...
- [论文理解]Focal Loss for Dense Object Detection(Retina Net)
Focal Loss for Dense Object Detection Intro 这又是一篇与何凯明大神有关的作品,文章主要解决了one-stage网络识别率普遍低于two-stage网络的问题 ...
- 论文阅读 | FoveaBox: Beyond Anchor-based Object Detector
论文阅读——FoveaBox: Beyond Anchor-based Object Detector 概述 这是一篇ArXiv 2019的文章,作者提出了一种新的anchor-free的目标检测框架 ...
- 论文阅读 | FCOS: Fully Convolutional One-Stage Object Detection
论文阅读——FCOS: Fully Convolutional One-Stage Object Detection 概述 目前anchor-free大热,从DenseBoxes到CornerNet. ...
- 新文预览 | IoU-aware Single-stage Object Detector for Accurate Localization
论文基于RetinaNet提出了IoU-aware sinage-stage目标检测算法,该算法在regression branch接入IoU predictor head并通过加权分类置信度和IoU ...
- [论文理解] CornerNet: Detecting Objects as Paired Keypoints
[论文理解] CornerNet: Detecting Objects as Paired Keypoints 简介 首先这是一篇anchor free的文章,看了之后觉得方法挺好的,预测左上角和右下 ...
- 论文阅读之 DECOLOR: Moving Object Detection by Detecting Contiguous Outliers in the Low-Rank Representation
DECOLOR: Moving Object Detection by Detecting Contiguous Outliers in the Low-Rank Representation Xia ...
- 论文笔记之:Natural Language Object Retrieval
论文笔记之:Natural Language Object Retrieval 2017-07-10 16:50:43 本文旨在通过给定的文本描述,在图像中去实现物体的定位和识别.大致流程图如下 ...
- [论文理解]关于ResNet的进一步理解
[论文理解]关于ResNet的理解 这两天回忆起resnet,感觉残差结构还是不怎么理解(可能当时理解了,时间长了忘了吧),重新梳理一下两点,关于resnet结构的思考. 要解决什么问题 论文的一大贡 ...
随机推荐
- 解决GitHub下载资源慢的问题
打开 C:\Windows\System32\drivers\etc\hosts 添加 # GitHub 解决下载速度慢的问题 192.30.253.113 github.com 151.101.18 ...
- Delphi 使用Query组件的SQL查询
樊伟胜
- Oracle笔记(五) 单行函数
虽然各个数据库都是支持SQL语句的,但是每一个数据库也有每一个数据库自己所支持的操作函数,这些就是单行函数,而如果要想进行数据库开发的话,除了要会使用SQL之外 ,就是要多学习函数. 单行函数主要分为 ...
- redis 的启动、关闭 判断其是否在运行中
#检查后台进程是否正在运行 ps -ef |grep redis ps aux | grep redis #检测6379端口是否在监听 netstat -lntp | grep 6379 #使用配置文 ...
- 8.2.ZooKeeper应用场景
7.ZooKeeper应用举例 为了方便大家理解ZooKeeper,在此就给大家举个例子,看看ZooKeeper是如何实现的他的服务的,我以ZooKeeper提供的基本服务分布式锁为例. 7.1 分布 ...
- 转PostgreSQL 用游标优化的一个例子
一位PG社区的朋友提到的一个应用场景,目前遇到性能问题. 数据结构大概是这样的,包含一个主键,一个数组,一个时间,其他字段. 请求分析: 有检索需求,比较频繁.查找数组中包含某些元素的记录,并按时间排 ...
- canvas制作圆形动态加载进度实例
window.onload=function(){ var loading=document.getElementById('loading'); var context=loading.getCon ...
- Python模拟浏览器多窗口切换
# 模拟浏览器多窗口切换 # 代码中引入selenium版本为:3.4.3 # 通过Chrom浏览器访问发起请求 # Chrom版本:59 ,chromdriver:2.3 # 需要对应版本的Chro ...
- HDU-1358-Period(KMP, 循环节)
链接: https://vjudge.net/problem/HDU-1358#author=0 题意: For each prefix of a given string S with N char ...
- Acwing-204-表达整数的奇怪方式(扩展中国剩余定理)
链接: https://www.acwing.com/problem/content/206/ 题意: 给定2n个整数a1,a2,-,an和m1,m2,-,mn,求一个最小的非负整数x,满足∀i∈[1 ...