Bresenham算法的实现思路
条件已知两个点的坐标p1(x0,y0),p2(x1,y1)要求画出这条直线
之后的e代表每次的误差积累,初始值为0,可以计算出斜率为k=dy/dx=(y0-y1)/(x0-x1)
1、x为阶跃步长(直线光栅化) 适用于0<k<1的情况
即x每次增加1,但是y的坐标根据其是靠近该点所处的单元格的距离来决定,如果离上边近则y加1,如果离下边近则还是y
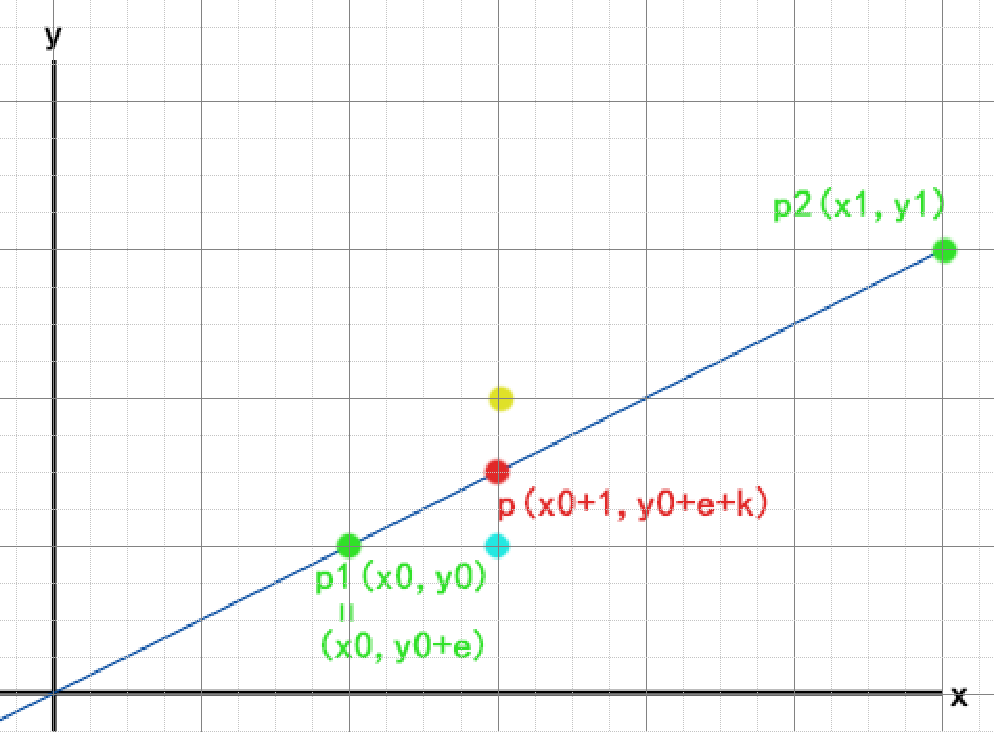
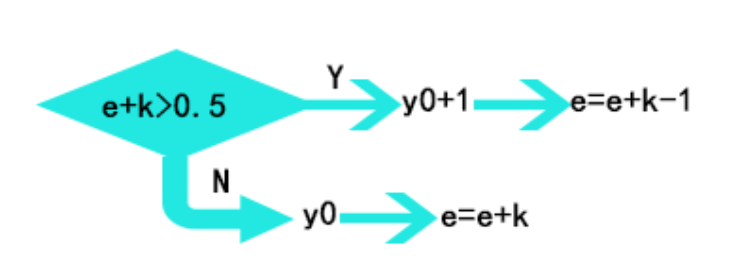
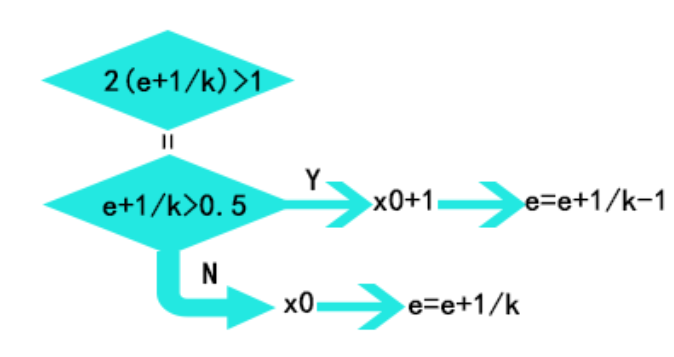
可以知道机器在画每一个点的时候都会有误差,则画出的第一个点的坐标(x0,y0)也相当于是(x0,y0+e),那么可以知道下个点的坐标为红色的p(x0+1,y0+e+k),但是机器在画p点时,如果p点的纵坐标不是整数时,应该进行判断这个点是接近黄点(x0+1,y0+1)还是接近蓝点(x0+1,y0),最后如果接近黄点则e累积k-1,如果接近蓝点则e累积k
在判断条件的两边同乘2得:
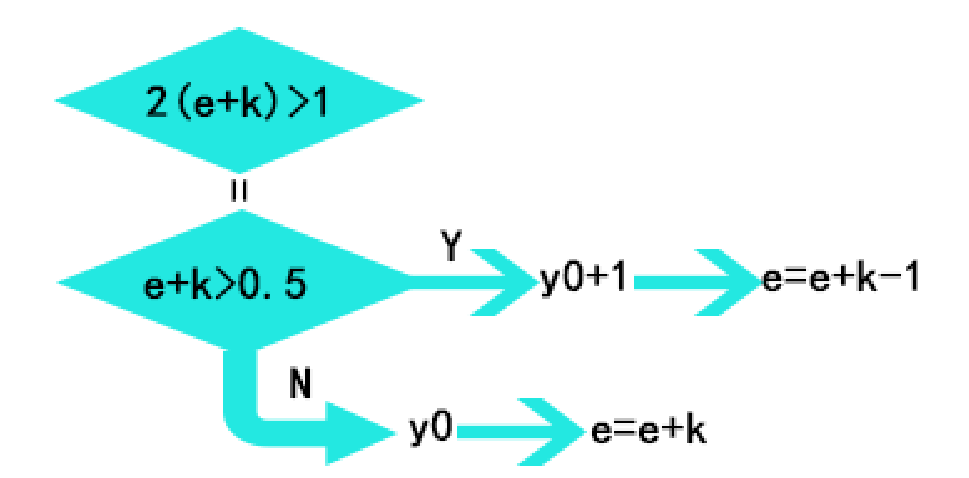
那么程序为:
void LineB2(int x0,int y0,int x1,int y1,int color,CDC *p){
int i,x,y,dx,dy;
float k,e;
dx=x1-x0;
dy=y1-y0;
k=(float)dy/dx;
e=-0.5;x=x0;y=y0;
for(i=;i<=dx;i++){
p->SetPixel(x,y,color);
x=x+;
e=e+k;
if(e>=){
y+=;
e=e-;
}
}
}
上面的程序中e使用了多次除法运算,算法效率低。
优化
将上面的k使用dy/dx替换,并且同乘dx后,令ξ=dx*e则:
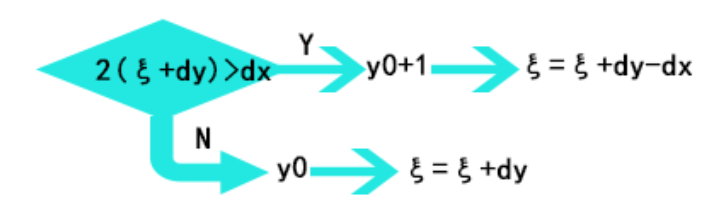
则程序为:
//在程序中e为上面的ξ
void LineB3(int x0,int y0,int x1,int y1,int color,CDC *p){
int i,x,y,dx,dy;
float e=;
dx=x1-x0;
dy=y1-y0;
e=-0.5;x=x0;y=y0;
for(i=;i<=dx;i++){
p->SetPixel(x,y,color);
x=x+;
if(*(e+dy)>=dx){
y+=;
e=e+dy-dx;
}else{
e=e+dy;
}
}
}
2、y为阶跃步长(直线光栅化) 适用于k>1的情况
同上可以推出:
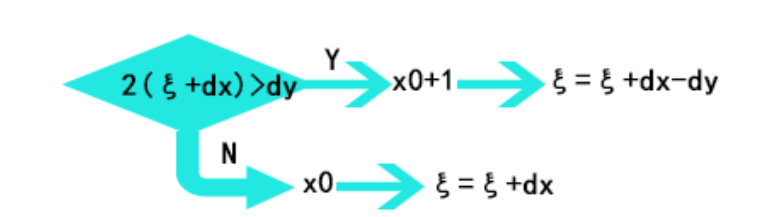
可以知道机器在画每一个点的时候都会有误差,则画出的第一个点的坐标(x0,y0)也相当于是(x0+e,y0),那么可以知道下个点的坐标为红色的p(x0+e+1/k,y0+1),但是机器在画p点时,如果p点的横坐标不是整数时,应该进行判断这个点是接近右边(x0+1,y0+1)还是接近蓝左边(x0,y0+1),最后如果接近右边则e累积1、k-1,如果接近左边则e累积1/k
优化得:
将上面的k使用dy/dx替换,并且同乘dy后,令ξ=dy*e则:
对于k<-1和-1<=k<=0可以通过对x取相反数来实现(与以上两种情况关于y轴对称)
Bresenham算法的实现思路的更多相关文章
- 直线的中点Bresenham算法的实现
一.实验目的 1.掌握在MFC中搭建图形绘制的基本框架的方法: 2.将直线的中点Bresenham算法转化成可执行代码. 二.实验内容 1. 通过分析具体数据在中点Bresenham算法上的执行过程, ...
- SSE图像算法优化系列十三:超高速BoxBlur算法的实现和优化(Opencv的速度的五倍)
在SSE图像算法优化系列五:超高速指数模糊算法的实现和优化(10000*10000在100ms左右实现) 一文中,我曾经说过优化后的ExpBlur比BoxBlur还要快,那个时候我比较的BoxBlur ...
- 万字长文,以代码的思想去详细讲解yolov3算法的实现原理和训练过程,Visdrone数据集实战训练
以代码的思想去详细讲解yolov3算法的实现原理和训练过程,并教使用visdrone2019数据集和自己制作数据集两种方式去训练自己的pytorch搭建的yolov3模型,吐血整理万字长文,纯属干货 ...
- 图像数据到网格数据-2——改进的SMC算法的实现
概要 本篇接上一篇继续介绍网格生成算法,同时不少内容继承自上篇.上篇介绍了经典的三维图像网格生成算法MarchingCubes,并且基于其思想和三角形表实现了对样例数据的网格构建.本篇继续探讨网格生成 ...
- Bug2算法的实现(RobotBASIC环境中仿真)
移动机器人智能的一个重要标志就是自主导航,而实现机器人自主导航有个基本要求--避障.之前简单介绍过Bug避障算法,但仅仅了解大致理论而不亲自动手实现一遍很难有深刻的印象,只能说似懂非懂.我不是天才,不 ...
- Canny边缘检测算法的实现
图像边缘信息主要集中在高频段,通常说图像锐化或检测边缘,实质就是高频滤波.我们知道微分运算是求信号的变化率,具有加强高频分量的作用.在空域运算中来说,对图像的锐化就是计算微分.由于数字图像的离散信号, ...
- java基础解析系列(四)---LinkedHashMap的原理及LRU算法的实现
java基础解析系列(四)---LinkedHashMap的原理及LRU算法的实现 java基础解析系列(一)---String.StringBuffer.StringBuilder java基础解析 ...
- 详解Linux内核红黑树算法的实现
转自:https://blog.csdn.net/npy_lp/article/details/7420689 内核源码:linux-2.6.38.8.tar.bz2 关于二叉查找树的概念请参考博文& ...
- 详细MATLAB 中BP神经网络算法的实现
MATLAB 中BP神经网络算法的实现 BP神经网络算法提供了一种普遍并且实用的方法从样例中学习值为实数.离散值或者向量的函数,这里就简单介绍一下如何用MATLAB编程实现该算法. 具体步骤 这里 ...
随机推荐
- DotNetCore深入了解之一Startup类
一个典型的ASP.NET Core应用程序会包含Program与Startup两个文件.Program类中有应用程序的入口方法Main,其中的处理逻辑通常是创建一个WebHostBuilder,再生成 ...
- solr(六): 集群
前言 随着用户的增多,空间和并发量越来越多,会导致一台solr服务器干不过了.这时候,就需要将solr集群以下. 集群架构 由多台服务器共同完成索引和搜索任务 实现的思路是将索引数据进行shard(分 ...
- leetcode — anagrams
import java.util.*; /** * * Source : https://oj.leetcode.com/problems/anagrams/ * * Created by lverp ...
- linux命令-awk入门
最近经常查看nginx日志,有时候需要做一些统计分析,于是就想起了awk,学习了就顺便做一个记录. 目录 概述:简单介绍awk背景原理 基本用法:常用到的awk语法 内建变量 综合实例 概述 awk是 ...
- 业务开发(二)—— Spring框架
0x01.使用枚举类,在MyBatis中 到了mapper.xml文件那里,如Status要与1进行对比,而不是1所对应的枚举字符串. 0x02.分页 Dao获取到的记录数,在Controller层放 ...
- 【转载】ASP.NET生成图片的缩略图
图片处理是C#程序开发中时常会涉及到的一个业务,除了图像的上传.保存以及下载等功能外,根据上传的图片生成一个缩略图也是常见业务,在C#语言中,可以通过Image类提供的相关方法对图片进行操作,如指定宽 ...
- CentOS 7.4 64位安装配置MySQL8.0
第一步:获取mysql YUM源 进入mysql官网获取RPM包下载地址 https://dev.mysql.com/downloads/repo/yum/ image.png 点击下载 im ...
- 数据库部分(MySql)_2
分组查询 分组查询通常和聚合函数结合使用,查询条件中每个XXX就以XXX为分组的条件: 格式:每个A的平均B select avg(B) from 表名 group by A; having 在whe ...
- redis.conf 常见配置介绍
参数说明redis.conf 配置项说明如下: 1. Redis默认不是以守护进程的方式运行,可以通过该配置项修改,使用yes启用守护进程 daemonize no 2. 当Redis以守护进程方式运 ...
- 【Java每日一题】20170228
20170227问题解析请点击今日问题下方的“[Java每日一题]20170228”查看(问题解析在公众号首发,公众号ID:weknow619) package Feb2017; import jav ...