PCL—低层次视觉—关键点检测(Harris)
除去NARF这种和特征检测联系比较紧密的方法外,一般来说特征检测都会对曲率变化比较剧烈的点更敏感。Harris算法是图像检测识别算法中非常重要的一个算法,其对物体姿态变化鲁棒性好,对旋转不敏感,可以很好的检测出物体的角点。甚至对于标定算法而言,HARRIS角点检测是使之能成功进行的基础。
HARRIS算法的思想还是很有意思的。很聪明也很trick.
1.Harris 算法
其思想及数学推导大致如下:
1.在图像中取一个窗 w (矩形窗,高斯窗,XX窗,各种窗,某师姐要改标定算法不就可以从选Harris的窗开始做起么。。。。。)
2.获得在该窗下的灰度 I
3.移动该窗,则灰度会发生变化,平坦区域灰度变化不大,边缘区域沿边缘方向灰度变化剧烈,角点处各个方向灰度变化均剧烈
4.依据3中条件选出角点
当然啦,如果Harris算子的实现也和它的思想这么平淡那我就不表扬他聪明了,Harris算子的具体实现方法,利用的是图像偏微分方程的思想。
先给出抽象数学表达式(不要问我为什么这么淡,我也不知道):

其中 w 代表窗函数,某个x,y为图像坐标,u,v是一个移动向量(既反应移动方向,也反应移动大小)。

Ix表示图像沿x方向的差分,Iy表示图像沿y方向的差分。图像差分算子有什么Sober~PXX~总之很多就对了,一阶差分还是很好求的。

显然,E(u,v)可以用另外一种形式来表示了。最终可以表达为协方差矩阵的形式。

OK,在这里我们有了数学中最优雅的表达——Matrix,especially symmetric Matrix. Nothing is better than that.


2.矩阵的方向性
显然,E(u,v)的值和u,v有关。。。很有关。。
1.可以取一组u,v,让E(u,v)的值最小。
2.还可以取一组u,v,让E(u,v)的值最大。
这些u,v怎么取,显然就和矩阵M的方向有关了。OK,让我们换一个思路来看这个矩阵。
平面内的一个矩阵乘以一个向量v,大概简单的写成 Mv
它会使得这个向量发生一个作用:旋转,拉伸,平移.....总之,这种作用叫做 线性变换
矩阵的左边好像也是一个向量,只不过是横着写的([u v]),换而言之,那就是 vT(v的转置)。
vT(Mv)......这是啥?
意思好像是。。。。v先旋转+拉伸一下,然后再在它自己身上投影,最终的 E(u,v)本质上来说,就是这个投影的长度。。。嗯,对,投影的长度
好了。我们现在明确了 E(u,v) 的数学几何意义,再回过头来想想,要怎样才能让这个投影的长度达到最大或者最小呢?
显然,答案就是矩阵的特征值与特征向量,当[u v]T 取特征向量方向的时候,矩阵M只有拉伸作用,而没有旋转作用,这时的投影长度是最长的(如果反向投则是负的最长)。
到此为止,我们已经知道了 E(u,v)的最大和最小值了(笨办法是求出特征向量方向再带进去,聪明的方法是直接看矩阵特征值,特征值就是放大倍数)。并且,分析可以知道,特征值越大,那么说明 E(u,v)越大。
1.两个特征值都很大==========>角点(两个响应方向)
2.一个特征值很大,一个很小=====>边缘(只有一个响应方向)
3.两个特征值都小============>平原地区(响应都很微弱)
基于上述特征,有很多人设计了角点的快速判据。
有 det(M) - trace(M)^2
有 det(M)/trace(M)
.....等等很多,但是这不重要,思想都是一样的。(某师姐这里又有一个标定算法的创新点哦。。。。我会告诉你换换判据又是个新思路?)
3. 3DHarris
在2DHarris里,我们使用了 图像梯度构成的 协方差矩阵。 图像梯度。。。嗯。。。。每个像素点都有一个梯度,在一阶信息量的情况下描述了两个相邻像素的关系。显然这个思想可以轻易的移植到点云上来。
OOPS,糟糕,点云木有灰度的概念啊,一般的点云也木有强度的概念啊。。。这可如何是好??????
别紧张,pcl 说这样能行,那就肯定能行咯,先定性的分析一下Harris3D的理念。
想象一下,如果在 点云中存在一点p
1、在p上建立一个局部坐标系:z方向是法线方向,x,y方向和z垂直。
2、在p上建立一个小正方体,不要太大,大概像材料力学分析应力那种就行
3、假设点云的密度是相同的,点云是一层蒙皮,不是实心的。
a、如果小正方体沿z方向移动,那小正方体里的点云数量应该不变
b、如果小正方体位于边缘上,则沿边缘移动,点云数量几乎不变,沿垂直边缘方向移动,点云数量改变
c、如果小正方体位于角点上,则有两个方向都会大幅改变点云数量
OK,我们已经有了Harris3D的基本准则,接下来要思考的是怎样优雅的解决这个问题
两个和z相互垂直的方向。。。。嗯。。。。perpendicular。。。。
如果由法向量x,y,z构成协方差矩阵,那么它应该是一个对称矩阵。而且特征向量有一个方向是法线方向,另外两个方向和法线垂直。
那么直接用协方差矩阵替换掉图像里的M矩阵,就得到了点云的Harris算法。
其中,半径r可以用来控制角点的规模
r小,则对应的角点越尖锐(对噪声更敏感)
r大,则可能在平缓的区域也检测出角点
r怎么取? 我也不知道。。。。。试吧。。。。。
4.PCL对Harris算法的实现
根据以上分析,在PCL的API文档的帮助下,我尝试了一下 Harris3D 算法。感谢山大的毕同学提供的点云,该点云是场景点云而不是一般的物体点云。总体感觉是慢,因为针对每个点云,需要计算它的法线,算完之后又要针对每个点进行协方差矩阵的计算,总而言之,整个过程还是非常耗时的。并且说实话。。。算法的效果一般般。
#include <iostream>
#include <pcl\io\pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/io/io.h>
#include <pcl/keypoints/harris_keypoint3D.h>
#include <cstdlib>
#include <vector>
using namespace std; int
main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile ("F:\\PCL\\PCD\\both.pcd", *cloud);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer);
viewer->addPointCloud(cloud,"all_cloud");
//注意Harris的输出点云必须是有强度(I)信息的,因为评估值保存在I分量里
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_out (new pcl::PointCloud<pcl::PointXYZI>);
pcl::HarrisKeypoint3D<pcl::PointXYZ,pcl::PointXYZI,pcl::Normal> harris;
harris.setInputCloud(cloud);
cout<<"input successful"<<endl;
harris.setNonMaxSupression(true);
harris.setRadius(0.04f);
harris.setThreshold(0.02f);
cout<<"parameter set successful"<<endl;
//新建的点云必须初始化,清零,否则指针会越界
cloud_out->height=;
cloud_out->width =;
cloud_out->resize(cloud_out->height*cloud->width);
cloud_out->clear();
harris.compute(*cloud_out);
int size = cloud_out->size(); pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_harris (new pcl::PointCloud<pcl::PointXYZ>);
cloud_harris->height=;
cloud_harris->width =;
cloud_harris->resize(cloud_out->height*cloud->width);
cloud_harris->clear(); pcl::PointXYZ point;
//可视化结果不支持XYZI格式点云,所有又要导回XYZ格式。。。。
for (int i = ;i<size;i++)
{
point.x = cloud_out->at(i).x;
point.y = cloud_out->at(i).y;
point.z = cloud_out->at(i).z;
cloud_harris->push_back(point);
} pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> harris_color_handler (cloud_harris, , , );
viewer->addPointCloud(cloud_harris,harris_color_handler,"harris");
viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, , "harris"); while (!viewer->wasStopped())
{
viewer->spinOnce(); } system("pause");
}
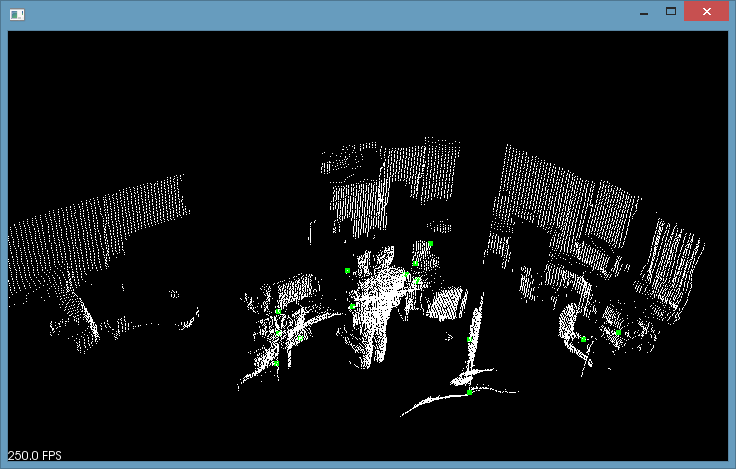
由于我选择的搜索半径比较大,所以找到的角点都不是太"角”,关于参数设置大家可以多多探索,但我认为,特征点检测算法实在太慢,对实时机器人系统来说是远远达不到要求的。这种先算法线,再算协方差的形式真心上不起。。。。实际上这种基于领域法线的特征点检测算法有点类似基于 CRF的语义识别算法,都只使用了相邻信息而忽略了全局信息。也可能相邻信息包含的相关性比较大,是通往高层次感知的唯一路径吧,谁又知道呢?
任重而道远。。。。。
PCL—低层次视觉—关键点检测(Harris)的更多相关文章
- PCL—低层次视觉—关键点检测(rangeImage)
关键点又称为感兴趣的点,是低层次视觉通往高层次视觉的捷径,抑或是高层次感知对低层次处理手段的妥协. ——三维视觉关键点检测 1.关键点,线,面 关键点=特征点: 关键线=边缘: 关键面=foregro ...
- PCL—低层次视觉—关键点检测(NARF)
关键点检测本质上来说,并不是一个独立的部分,它往往和特征描述联系在一起,再将特征描述和识别.寻物联系在一起.关键点检测可以说是通往高层次视觉的重要基础.但本章节仅在低层次视觉上讨论点云处理问题,故所有 ...
- PCL—低层次视觉—关键点检测(iss&Trajkovic)
关键点检测往往需要和特征提取联合在一起,关键点检测的一个重要性质就是旋转不变性,也就是说,物体旋转后还能够检测出对应的关键点.不过说实话我觉的这个要求对机器人视觉来说是比较鸡肋的.因为机器人采集到的三 ...
- PCL—低层次视觉—点云分割(邻近信息)
分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最简单的分割方式就是在边界上找些居民问:"小伙子,你到底能不能上油管啊?”.然后把能上油管的居民坐标 ...
- PCL—低层次视觉—点云分割(基于凹凸性)
1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割算法是实现复杂功能的基础.但是大家搞了几十年也还没搞定——不是我说的,是接下来要介绍的这篇论文说的.图像分割 ...
- PCL—低层次视觉—点云分割(超体聚类)
1.超体聚类——一种来自图像的分割方法 超体(supervoxel)是一种集合,集合的元素是“体”.与体素滤波器中的体类似,其本质是一个个的小方块.与之前提到的所有分割手段不同,超体聚类的目的并不是分 ...
- PCL—低层次视觉—点云滤波(基于点云频率)
1.点云的频率 今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概念.但这个概念并未在文献中出现也未被使用,谨在本博文中滥用一下“高频”一词.点云表达的是三维空间中的一种信息 ...
- PCL—低层次视觉—点云分割(最小割算法)
1.点云分割的精度 在之前的两个章节里介绍了基于采样一致的点云分割和基于临近搜索的点云分割算法.基于采样一致的点云分割算法显然是意识流的,它只能割出大概的点云(可能是杯子的一部分,但杯把儿肯定没分割出 ...
- PCL—低层次视觉—点云分割(RanSaC)
点云分割 点云分割可谓点云处理的精髓,也是三维图像相对二维图像最大优势的体现.不过多插一句,自Niloy J Mitra教授的Global contrast based salient region ...
随机推荐
- R语言绘制花瓣图flower plot
R语言中有很多现成的R包,可以绘制venn图,但是最多支持5组,当组别数大于5时,venn图即使能够画出来,看上去也非常复杂,不够直观: 在实际的数据分析中,组别大于5的情况还是经常遇到的,这是就可以 ...
- 分享9款最新超酷HTML5/CSS3应用插件
新的一周开始了,小编继续要为大家分享实用超酷的HTML5应用,今天分享的这9款最新HTML5/CSS3应用你一定会很喜欢,一起来看看. 1.HTML5 Canvas模拟衣服撕扯动画 超级逼真 今天又要 ...
- nginx搭建(centos7)
1.安装前准备: 系统: CentOS 7.5 x64 下载包:wget yum -y install wget 安装: 2.安装一下这些依赖条件: yum install gcc pcre pcre ...
- [转]linux下lame的使用
找到這篇好文章,不得不说開源的Lame功能很強大 linux下lame的使用 % lame [参数] <输入文件名> [<输出文件名>] 如需查询更多参数,可输入下列命令: % ...
- 【WP8】自定义EventAggregator
MVVM模式实现了ViewModel和View的分离,但是有很多时候我们需要进行页面间通信 比如,我们在设置界面修改了某个项的值,需要同步到主页面,让主页面做相关的逻辑,由于每个页面对应一个ViewM ...
- JavaBridge
有的时候我们需要在PHP里调用JAVA平台封装好的jar包里的class类和方法 一般的做法是采用php-java-bridge做桥接 1.实现原理: 先打开java的一个监听端口,php调用java ...
- easyui combobox简单用法
<script type="text/javascript">var order_pay_type;$(function() { $("#order_pay_ ...
- LINE 不被封锁的技巧
什么是封锁? 谈LINE 被封锁之前,我们先来了解一下什么是封锁.LINE 的封锁分为「好友封锁你」与「官方封锁你」二种,有些人将官方封锁讲成「停权」,其实LINE 的停权并不是你的帐号全被封锁,被封 ...
- iOS UITextField控件总结
先声明下面总结不是自己写的. 参考网址:http://blog.csdn.net/tskyfree/article/details/8121915 //初始化textfield并设置位置及大小 U ...
- POJ 1459 && ZOJ 1734--Power Network【最大流dinic】
Power Network Time Limit: 2000MS Memory Limit: 32768K Total Submissions: 25108 Accepted: 13077 D ...