基于RRT的机器人自主探索建图
一、方法讲解:
本项目分为三个部分:机器人周围一定范围内基于RRT的全局检测,
根据上一步检测的未知区域点执行sklearn.cluster.MeanShift聚类,获取聚类中心;
根据聚类中心计算各点增益,取最大增益点为目标,调用move_base规划路径和控制机器人行走。
二、各部分详解:
2.1 基于RRT的全局检测:检测未知区域点并发布
以机器人为中心,激光采样范围为半径的正方形区域内,采用RRT算法计算未知区域点:如果RRT计算的某点在要计算的地图范围内,并且该点在地图内的状态为空闲区域点,则将该点加入RRT树;如果该点在地图的状态为未知状态区域,则该点不加入RRT树,并将该点发布出去;
2.2 根据上一步检测的未知区域点执行sklearn.cluster.MeanShift聚类,获取聚类中心:
该部分订阅全局检测的未知区域点,并利用MeanShift算法获取聚类中心;
2.3 根据聚类中心计算各点增益,取最大增益点为目标,调用move_base规划路径和控制行走。
根据设定的信息半径,和上一步的聚类中心,结合聚类中心离机器人的距离,计算各个聚类中心的信息增益,然后取信息增益最大的点作为目标点,调用move_base来向该点移动;新的聚类中心和增益不停被计算,因此在运动过程中目标点可能会改变,或者因为移动地图中原来的目标点变为空闲区域,则新的目标点会被计算。
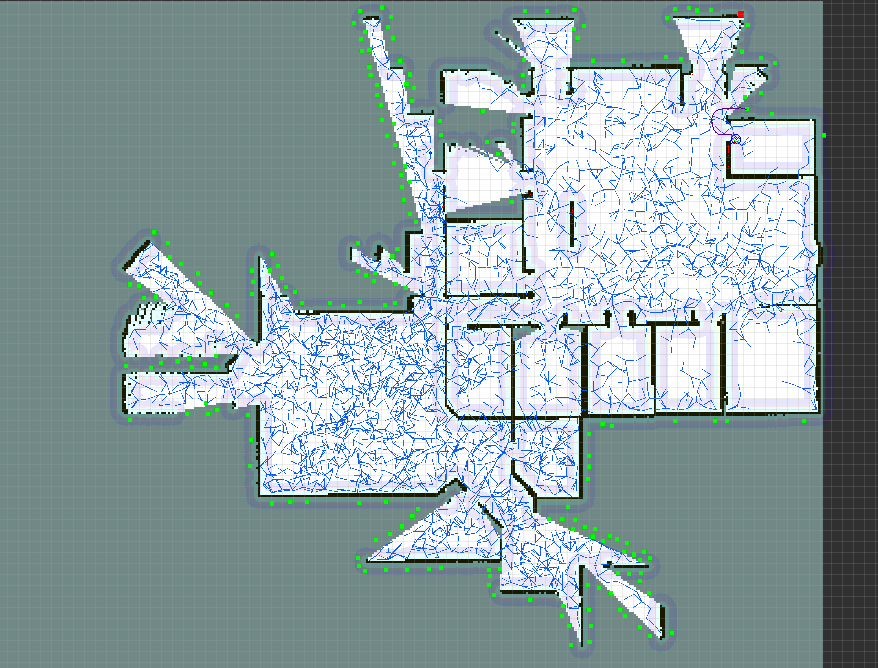
三、效果展示:
建图算法采用gmapping,激光角度220度.,激光范围14米。
蓝色线:全局RRT树;
绿色点:地图状态未知区域点
绿色线:move_base全局规划
紫色线:机器人移动轨迹。
例一:



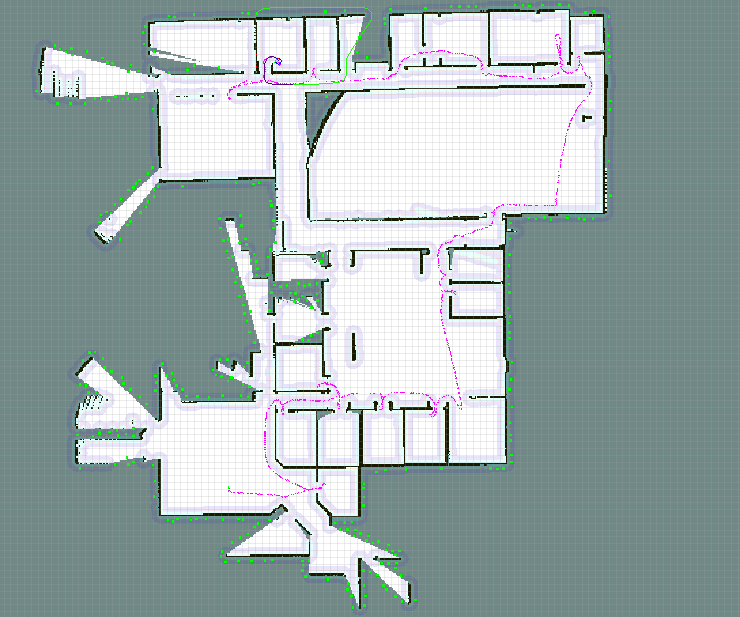
例二、

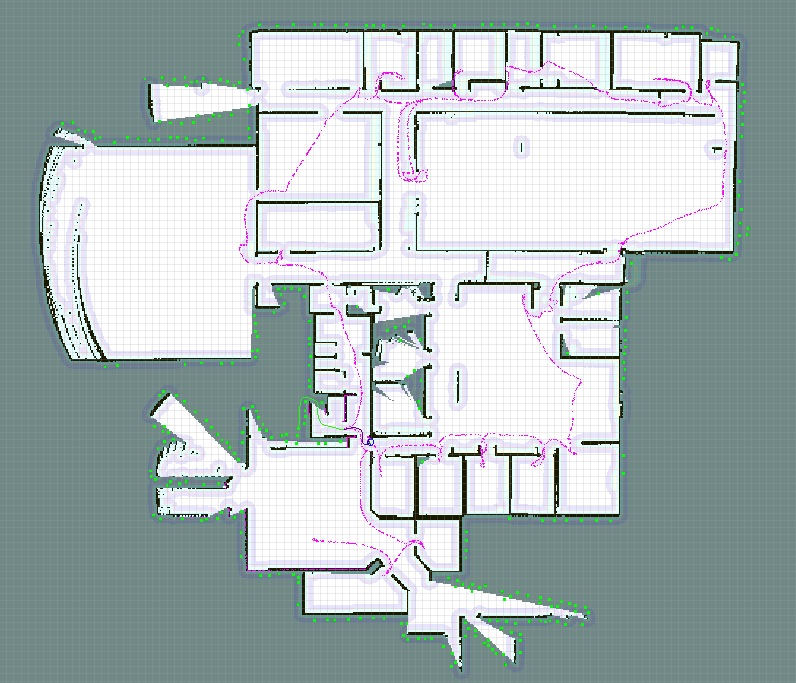
仿真环境下:左下角、底部及右下角图建歪了。
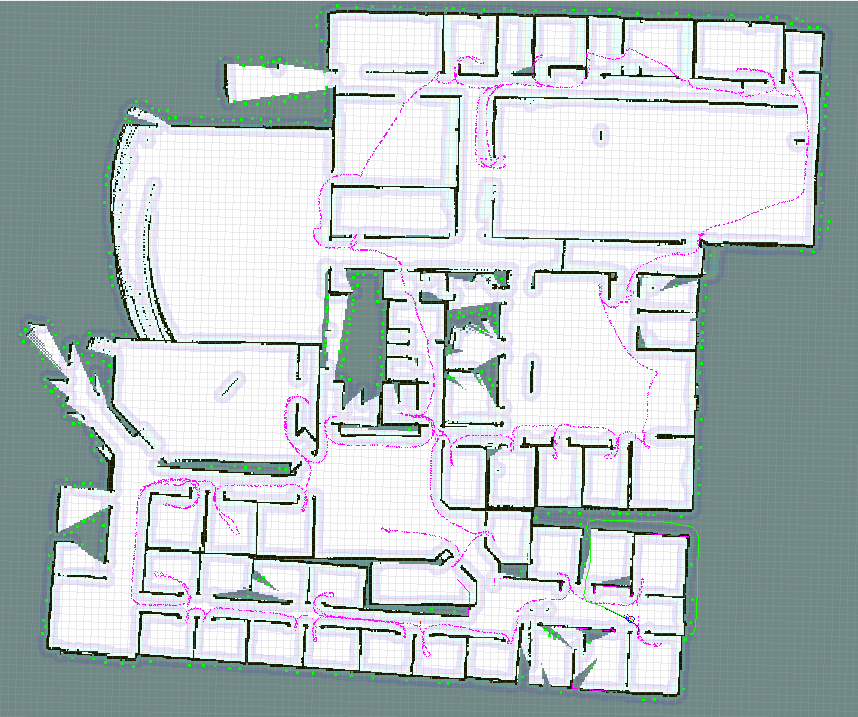
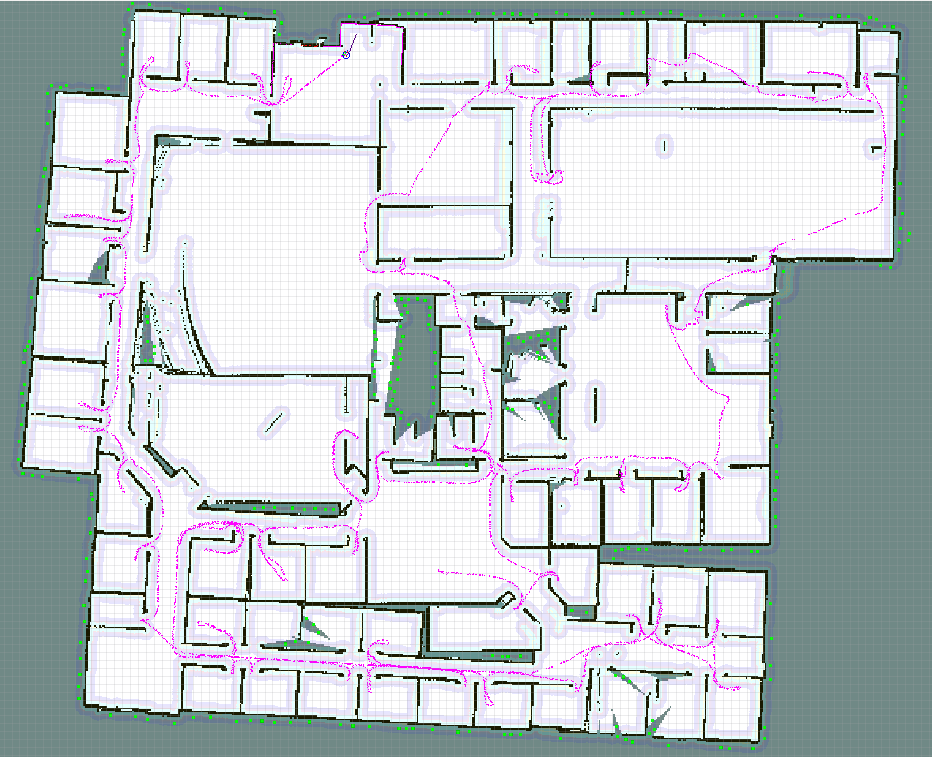
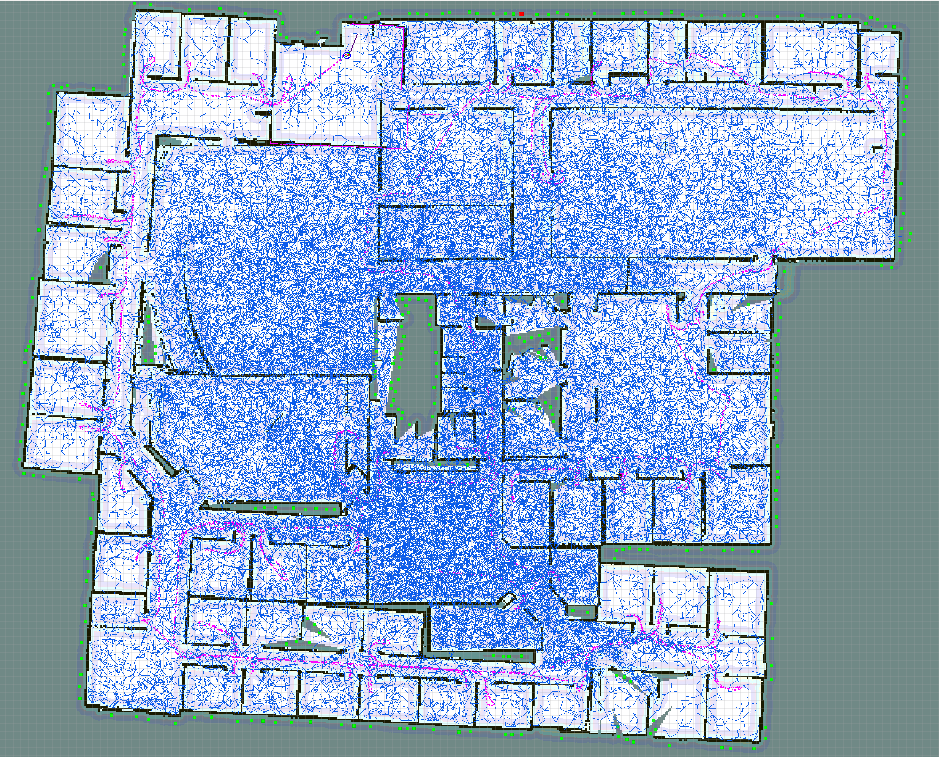
仿真模型大小:70米*64米

基于RRT的机器人自主探索建图的更多相关文章
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- 基于ros2 dashing的建图导航探索
基于ros2 dashing的建图导航探索 1. 环境准备 安装ros2 dashing, 参考链接: https://index.ros.org/doc/ros2/Installation/Dash ...
- 除了ROS ,机器人自主定位导航还能怎么做?
博客转载自:https://www.leiphone.com/news/201609/10QD7yp7JFV9H9Ni.html 雷锋网(公众号:雷锋网)按:本文作者科技剪刀手,思岚科技技术顾问. 随 ...
- cartographer环境建立以及建图测试(详细级)
- 机器人自主移动的秘密:实际应用中,SLAM究竟是如何实现的?(二)
博客转载自:https://www.leiphone.com/news/201612/FRzmoEI8Iud6CmT2.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- 【BZOJ-2879】美食节 最小费用最大流 + 动态建图
2879: [Noi2012]美食节 Time Limit: 10 Sec Memory Limit: 512 MBSubmit: 1366 Solved: 737[Submit][Status] ...
- 使用hector-slam和Kinect V1建图
一.建图实际操作 下载源码测试源码,depthimage_to_laserscan,参考https://blog.csdn.net/u010925447/article/details/5649468 ...
- 通过gmapping和伪造的odom,完成Kinect建图
传感器信息: 环境深度信息:sensor_msgs/laserScan -----> RGBD三维点云数据:通过ros功能包depthimage to laserscan完成深度相机数据转换成激 ...
随机推荐
- Linux系统崩溃,数据迁移
就在1小时前,处理了件如标题所述的麻烦事儿.吃完午饭,想对此作个总结,一来自己梳理下过程以便后面遇见类似的事可以 快速处理,二来同行的小伙伴们可以探讨下.故事是这样的,公司所在园区物业晚上断电8小时, ...
- Java数据处理
对于形如“(TYPE=SITA##)&&(((CTYP=FPL##)||(CTYP=CHG##)||(CTYP=CNL##)||(CTYP=DLA##)||(CTYP=DL##)||( ...
- python__系统 : socket_TCP相关
tcp和udp对比起来.还是tcp相对稳定一些,但是因为有三次挥手和四次握手,以及确认包(ack)的存在,可能在速度上会比udp慢. 用python的socket模块可以建立tcp服务端: from ...
- 深入理解restfulAPI和 Oauth2.0(精简版)
一.restfulAPI 1.解释: restfulAPI协议,我们也可以说是一套API接口编写风格. 它被现在很多企业所认可和默认,是一套成俗的API接口编写方案. 2.restfulAPI之资源 ...
- ios 苹果内购订单验证 --- php实现
验证函数: function appleVerify($receipt_data,$orderId = 0) { /* * 21000 App Store不能读取你提供的JSON对象 * 21002 ...
- Python学习笔记:Matplotlib(数据可视化)
Matplotlib是一个可以将数据绘制为图形表示的Python三方库,包括线性图(折线图,函数图).柱形图.饼图等基础而直观的图形,在平常的开发当中需要绘图时就非常有用了. 安装:pip insta ...
- 24-webhost的配置
1-新建asp.net core空项目 2-创建setting.json文件 3- 配制Progrom类中CreateWebHostBuilder 4-获取配置的文件 5-显示结果
- 安装python 第三方库遇到的安装问题 microsoft visual studio c++ 10.0 is required,Could not find function xmlCheckVersion in library libxml2. Is libxml2 installed?
问题一: microsoft visual studio c++ 10.0 is required 安装scrapy时候出现需要vc c++ 10,有时安装其他也会有. 解决方法:安装vc 2010, ...
- 关于requestMapping 进行url映射实现小小知识点 以及如何获取请求的url中的参数
requstMapping 用来处理url映射 可以作用在controller类上 也可以作用在方法上 经常使用的方式 通过接收一种映射关系 @RequestMapping("/del ...
- 网易云深度剖析Kubernetes优化与实践
欢迎访问网易云社区,了解更多网易技术产品运营经验. 10 月 15 日,聚焦 Kubernetes 中国行业应用与技术落地的首届中国 Kubernetes 用户大会(KEUC)在杭州成功举办.本次大会 ...