uboot启动第一阶段分析
一. uboot第一阶段初识
1.1. 什么是uboot第一阶段
1.1.1. 启动os三个阶段
1.1.1.1. bl0阶段
a. 这段代码是三星固化到iROM中,可以查看《S5PV210_iROM_ApplicationNote_Preliminary_20091126.pdf》
b. 这段代码作用是将uboot第一阶段的8kb加载到iRAM中
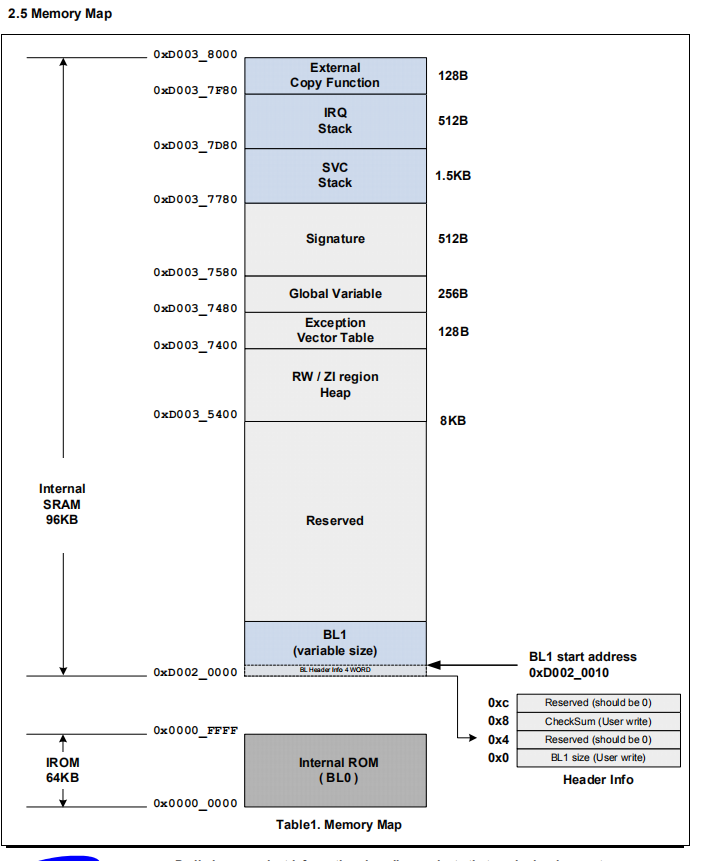
1.1.1.2. bl1阶段(uboot第一阶段)
a. 此部分是整个uboot的前8k部分
b. 此部分由bl0 加载到iRAM指定地址
1.1.1.3. bl2阶段(整个uboot)
a. 此部分是整个uboot
b. 此部分由bl1重定位到DDR的链接地址启动开始执行
c. uboot的第二阶段就是要初始化bl1剩下的还没被初始化的硬件。主要是SoC外部硬件(譬如iNand、网卡芯片····)、uboot本身的一些东西(uboot的命令、环境变量等····)。然后最终初始化完必要的东西后进入uboot的命令行准备接受命令。
1.2. 第一阶段主要作用
a. 初始化DDR
b. 将(bl2)整个uboot重定位到DDR中
c. 跳转到DDR中执行uboot(长跳转)
二. uboot 第一阶段源码分析
2.1. uboot链接脚本分析
a. ENTRY(_start):整个程序的入口取决于链接脚本中ENTRY声明的地方。ENTRY(_start)因此_start符号所在的文件就是整个程序的起始文件,_start所在处的代码就是整个程序的起始代码。
b. 在text段中,指定很多文件的段靠前存放,这样可以保证必要的文件可以在uboot前8K地址内
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")
/*OUTPUT_FORMAT("elf32-arm", "elf32-arm", "elf32-arm")*/
OUTPUT_ARCH(arm)
ENTRY(_start)
SECTIONS
{
. = 0x00000000;
. = ALIGN();
.text :
{
cpu/s5pc11x/start.o (.text)
cpu/s5pc11x/s5pc110/cpu_init.o (.text)
board/samsung/x210/lowlevel_init.o (.text)
cpu/s5pc11x/onenand_cp.o (.text)
cpu/s5pc11x/nand_cp.o (.text)
cpu/s5pc11x/movi.o (.text)
common/secure_boot.o (.text)
common/ace_sha1.o (.text)
cpu/s5pc11x/pmic.o (.text)
*(.text)
}
. = ALIGN();
.rodata : { *(.rodata) }
. = ALIGN();
.data : { *(.data) }
. = ALIGN();
.got : { *(.got) }
__u_boot_cmd_start = .;
.u_boot_cmd : { *(.u_boot_cmd) }
__u_boot_cmd_end = .;
. = ALIGN();
.mmudata : { *(.mmudata) }
. = ALIGN();
__bss_start = .;
.bss : { *(.bss) }
_end = .;
}
2.2. start.S分析
2.2.1. 相关头文件分析
a. 有些头文件是在配置/编译过程生成的
b. 有些头文件使用了符号链接
c. 很多宏定义在x210_sd.h宏定义,但此文件被config.h所引用
#include <config.h>
#include <version.h>
#if defined(CONFIG_ENABLE_MMU)
#include <asm/proc/domain.h>
#endif
#include <regs.h>
2.2.2. uboot头信息地址占位
a. 定义4个字空间占用16字节,16字节信息定义可以查看 《S5PV210_iROM_ApplicationNote_Preliminary_20091126.pdf》
b. 此处仅仅是定义并未赋有效值,有效值再制作usb启动uboot是写入(如使用sd_fusing中sd_fdisk.c文件会填充)
#if defined(CONFIG_EVT1) && !defined(CONFIG_FUSED)
.word 0x2000
.word 0x0
.word 0x0
.word 0x0
#endif
2.2.3. _start汇编标号分析
2.3.1.1. 上述我们已经分析了,启动bl1时的起点就是_start
2.3.1.2. b reset为什么开始执行的第一句汇编
a. 无论是复位还是开启都属于重启,故启动先执行reset很合理
b. reset后cpu处于SVC模式,reset汇编重新设置模式也无妨
reset:
/*
* set the cpu to SVC32 mode and IRQ & FIQ disable
*/
@;mrs r0,cpsr
@;bic r0,r0,#0x1f
@;orr r0,r0,#0xd3
@;msr cpsr,r0
msr cpsr_c, #0xd3 @ I & F disable, Mode: 0x13 - SVC
2.2.4. 设置栈到iRAM
a. 此时DDR未初始化,但后面需要压栈出栈故此时把栈设置到iRAM
b. 栈地址使用《S5PV210_iROM_ApplicationNote_Preliminary_20091126.pdf》memery map推荐的栈地址
/*
* Go setup Memory and board specific bits prior to relocation.
*/ ldr sp, =0xd0036000 /* end of sram dedicated to u-boot */
sub sp, sp, # /* set stack */
mov fp, #
2.2.5. lowlevel_init分析
2.2.5.1. _TEXT_BASE
2.2.5.1.1. 此标号相对应变量,变量值为TEXT_BASE
2.2.5.1.2. TEXT_BASE是怎么来的
a. 该变量值是make x210_sd_config配置时写入到config.mk文件中
b. 该值会在\uboot\config.mk中作为uboot链接地址
x210_sd_config : unconfig
@$(MKCONFIG) $(@:_config=) arm s5pc11x x210 samsung s5pc110
@echo "TEXT_BASE = 0xc3e00000" > $(obj)board/samsung/x210/config.mk
2.2.5.2. 判断当前代码执行位置
a. 这几行代码的作用就是判定当前代码执行的位置在SRAM中还是在DDR中。为什么要做这个判定?
原因1:BL1(uboot的前一部分)在SRAM中有一份,在DDR中也有一份,因此如果是冷启动那么当前代码应该是在SRAM中运行的BL1,如果是低功耗状态的复位这时候应该就是在DDR中运行的。
原因2:我们判定当前运行代码的地址是有用的,可以指导后面代码的运行。譬如在lowlevel_init.S中判定当前代码的运行地址,就是为了确定要不要执行时钟初始化和初始化DDR的代码。如果当前代码是在SRAM中,说明冷启动,那么时钟和DDR都需要初始化;如果当前代码是在DDR中,那么说明是热启动则时钟和DDR都不用再次初始化。
b. bic r1, pc, r0 这句代码的意义是:将pc的值中的某些bit位清0,剩下一些特殊的bit位赋值给r1(r0中为1的那些位清零)相等于:r1 = pc & ~(ff000fff)
ldr r2, _TEXT_BASE 加载链接地址到r2,然后将r2的相应位清0剩下特定位。
c. 最后比较r1和r2.
ldr r0, =0xff000fff
bic r1, pc, r0 /* r0 <- current base addr of code */
ldr r2, _TEXT_BASE /* r1 <- original base addr in ram */
bic r2, r2, r0 /* r0 <- current base addr of code */
cmp r1, r2 /* compare r0, r1 */
beq 1f /* r0 == r1 then skip sdram init */
2.2.5.3. lowlevel_init总结
a. 检查复位状态、IO恢复、关看门狗、开发板供电锁存、时钟初始化、DDR初始化、串口初始化并打印'O'、tzpc初始化、打印'K'。
b. 其中值得关注的:关看门狗、开发板供电锁存、时钟初始化、DDR初始化、打印"OK"
_TEXT_BASE:
.word TEXT_BASE .globl lowlevel_init
lowlevel_init:
push {lr} /* check reset status */ ldr r0, =(ELFIN_CLOCK_POWER_BASE+RST_STAT_OFFSET)
ldr r1, [r0]
bic r1, r1, #0xfff6ffff
cmp r1, #0x10000
beq wakeup_reset_pre
cmp r1, #0x80000
beq wakeup_reset_from_didle /* IO Retention release */
ldr r0, =(ELFIN_CLOCK_POWER_BASE + OTHERS_OFFSET)
ldr r1, [r0]
ldr r2, =IO_RET_REL
orr r1, r1, r2
str r1, [r0] /* Disable Watchdog */
ldr r0, =ELFIN_WATCHDOG_BASE /* 0xE2700000 */
mov r1, #
str r1, [r0] /* SRAM(2MB) init for SMDKC110 */
/* GPJ1 SROM_ADDR_16to21 */
ldr r0, =ELFIN_GPIO_BASE ldr r1, [r0, #GPJ1CON_OFFSET]
bic r1, r1, #0xFFFFFF
ldr r2, =0x444444
orr r1, r1, r2
str r1, [r0, #GPJ1CON_OFFSET] ldr r1, [r0, #GPJ1PUD_OFFSET]
ldr r2, =0x3ff
bic r1, r1, r2
str r1, [r0, #GPJ1PUD_OFFSET] /* GPJ4 SROM_ADDR_16to21 */
ldr r1, [r0, #GPJ4CON_OFFSET]
bic r1, r1, #(0xf<<)
ldr r2, =(0x4<<)
orr r1, r1, r2
str r1, [r0, #GPJ4CON_OFFSET] ldr r1, [r0, #GPJ4PUD_OFFSET]
ldr r2, =(0x3<<)
bic r1, r1, r2
str r1, [r0, #GPJ4PUD_OFFSET] /* CS0 - 16bit sram, enable nBE, Byte base address */
ldr r0, =ELFIN_SROM_BASE /* 0xE8000000 */
mov r1, #0x1
str r1, [r0] /* PS_HOLD pin(GPH0_0) set to high */
ldr r0, =(ELFIN_CLOCK_POWER_BASE + PS_HOLD_CONTROL_OFFSET)
ldr r1, [r0]
orr r1, r1, #0x300
orr r1, r1, #0x1
str r1, [r0] /* when we already run in ram, we don't need to relocate U-Boot.
* and actually, memory controller must be configured before U-Boot
* is running in ram.
*/
ldr r0, =0xff000fff
bic r1, pc, r0 /* r0 <- current base addr of code */
ldr r2, _TEXT_BASE /* r1 <- original base addr in ram */
bic r2, r2, r0 /* r0 <- current base addr of code */
cmp r1, r2 /* compare r0, r1 */
beq 1f /* r0 == r1 then skip sdram init */ /* init system clock */
bl system_clock_init /* Memory initialize */
bl mem_ctrl_asm_init :
/* for UART */
bl uart_asm_init bl tzpc_init #if defined(CONFIG_ONENAND)
bl onenandcon_init
#endif #if defined(CONFIG_NAND)
/* simple init for NAND */
bl nand_asm_init
#endif /* check reset status */ ldr r0, =(ELFIN_CLOCK_POWER_BASE+RST_STAT_OFFSET)
ldr r1, [r0]
bic r1, r1, #0xfffeffff
cmp r1, #0x10000
beq wakeup_reset_pre /* ABB disable */
ldr r0, =0xE010C300
orr r1, r1, #(0x1<<)
str r1, [r0] /* Print 'K' */
ldr r0, =ELFIN_UART_CONSOLE_BASE
ldr r1, =0x4b4b4b4b
str r1, [r0, #UTXH_OFFSET] pop {pc}
2.2.6. uboot重定位详解
a. 真正的重定位是通过调用movi_bl2_copy函数完成的,在uboot/cpu/s5pc11x/movi.c中。是一个C语言的函数
b. copy_bl2(2, MOVI_BL2_POS, MOVI_BL2_BLKCNT,CFG_PHY_UBOOT_BASE, 0);
分析参数:2表示通道2;MOVI_BL2_POS是uboot的第二部分在SD卡中的开始扇区,这个扇区数字必须和烧录uboot时烧录的位置相同;MOVI_BL2_BLKCNT是uboot的长度占用的扇区数;CFG_PHY_UBOOT_BASE是重定位时将uboot的第二部分复制到DDR中的起始地址(33E00000).
ldr r0, =INF_REG_BASE
ldr r1, [r0, #INF_REG3_OFFSET]
cmp r1, #BOOT_NAND /* 0x0 => boot device is nand */
beq nand_boot
cmp r1, #BOOT_ONENAND /* 0x1 => boot device is onenand */
beq onenand_boot
cmp r1, #BOOT_MMCSD
beq mmcsd_boot
cmp r1, #BOOT_NOR
beq nor_boot
cmp r1, #BOOT_SEC_DEV
beq mmcsd_boot nand_boot:
mov r0, #0x1000
bl copy_from_nand
b after_copy onenand_boot:
bl onenand_bl2_copy
b after_copy mmcsd_boot:
#if DELETE
ldr sp, _TEXT_PHY_BASE
sub sp, sp, #
mov fp, #
#endif
bl movi_bl2_copy
b after_copy nor_boot:
bl read_hword
b after_copy
2.2.7. 设置MMU
a. MMU就是memory management unit,内存管理单元。MMU实际上是SOC中一个硬件单元,它的主要功能就是实现虚拟地址到物理地址的映射。
b. MMU单片在CP15协处理器中进行控制,也就是说要操控MMU进行虚拟地址映射,方法就是对cp15协处理器的寄存器进行编程。
c. MMU的作用
(1)访问控制就是:在管理上对内存进行分块,然后每块进行独立的虚拟地址映射,然后在每一块的映射关系中同时还实现了访问控制(对该块可读、可写、只读、只写、不可访问等控制)
(2)回想在C语言中编程中经常会出现一个错误:Segmentation fault。实际上这个段错误就和MMU实现的访问控制有关。当前程序只能操作自己有权操作的地址范围(若干个内存块),如果当前程序指针出错访问了不该访问的内存块则就会触发段错误。
after_copy: #if defined(CONFIG_ENABLE_MMU)
enable_mmu:
/* enable domain access */
ldr r5, =0x0000ffff
mcr p15, , r5, c3, c0, @load domain access register /* Set the TTB register */
ldr r0, _mmu_table_base
ldr r1, =CFG_PHY_UBOOT_BASE
ldr r2, =0xfff00000
bic r0, r0, r2
orr r1, r0, r1
mcr p15, , r1, c2, c0, /* Enable the MMU */
mmu_on:
mrc p15, , r0, c1, c0,
orr r0, r0, #
mcr p15, , r0, c1, c0,
nop
nop
nop
nop
#endif
2.2.8. 再次设置栈,清理bss
a. 第三次设置栈。这次设置栈还是在DDR中,之前虽然已经在DDR中设置过一次栈了,但是本次设置栈的目的是将栈放在比较合适(安全,紧凑而不浪费内存)的地方。
b. 我们实际将栈设置在uboot起始地址上方2MB处,这样安全的栈空间是:2MB-uboot大小-0x1000=1.8MB左右。这个空间既没有太浪费内存,又足够安全。
c. 清理bss段代码和裸机中讲的一样。注意表示bss段的开头和结尾地址的符号是从链接脚本u-boot.lds得来的。
stack_setup:
#if defined(CONFIG_MEMORY_UPPER_CODE)
ldr sp, =(CFG_UBOOT_BASE + CFG_UBOOT_SIZE - 0x1000)
#else
ldr r0, _TEXT_BASE /* upper 128 KiB: relocated uboot */
sub r0, r0, #CFG_MALLOC_LEN /* malloc area */
sub r0, r0, #CFG_GBL_DATA_SIZE /* bdinfo */
#if defined(CONFIG_USE_IRQ)
sub r0, r0, #(CONFIG_STACKSIZE_IRQ+CONFIG_STACKSIZE_FIQ)
#endif
sub sp, r0, # /* leave 3 words for abort-stack */ #endif clear_bss:
ldr r0, _bss_start /* find start of bss segment */
ldr r1, _bss_end /* stop here */
mov r2, #0x00000000 /* clear */
2.2.9. 开启uboot第二阶段
a. start_armboot是uboot/lib_arm/board.c中,这是一个C语言实现的函数。这个函数就是uboot的第二阶段。这句代码的作用就是将uboot第二阶段执行的函数的地址传给pc,实际上就是使用一个远跳转直接跳转到DDR中的第二阶段开始地址处。
b. 远跳转的含义就是这句话加载的地址和当前运行地址无关,而和链接地址有关。因此这个远跳转可以实现从SRAM中的第一阶段跳转到DDR中的第二阶段。
c. 这里这个远跳转就是uboot第一阶段和第二阶段的分界线。
clbss_l:
str r2, [r0] /* clear loop... */
add r0, r0, #
cmp r0, r1
ble clbss_l ldr pc, _start_armboot _start_armboot:
.word start_armboot
uboot启动第一阶段分析的更多相关文章
- u-boot启动第一阶段
目标板:2440开发板 u-boot启动的第一阶段是在文件start.S中完成的,这个过程对不同硬件平台的设置是不同的.下面进入start.S _start: b reset //跳转到reset / ...
- 嵌入式Linux驱动学习之路(五)u-boot启动流程分析
这里说的u-boot启动流程,值得是从上电开机执行u-boot,到u-boot,到u-boot加载操作系统的过程.这一过程可以分为两个过程,各个阶段的功能如下. 第一阶段的功能: 硬件设备初始化. 加 ...
- (转载)U-boot启动完全分析
1.1 U-Boot工作过程 U-Boot启动内核的过程可以分为两个阶段,两个阶段的功能如下: (1)第一阶段的功能 Ø 硬件设备初始化 Ø 加载U-Boot第二阶段代码到RAM空间 Ø 设置好栈 Ø ...
- U-Boot启动过程完全分析
U-Boot启动过程完全分析 1.1 U-Boot工作过程 U-Boot启动内核的过程可以分为两个阶段,两个阶段的功能如下: (1)第一阶段的功能 硬件设备初始化 加载U-Boot第二阶段 ...
- 嵌入式Linux开发之uboot启动Linux整体流程分析
嵌入式Linux开发之uboot启动Linux整体流程分析 Uboot全称Universal Boot Loader,一个遵循GPL协议的的开源项目,其作用是引导操作系统,支持引导linux.VxWo ...
- U-Boot启动过程完全分析<转>
转载自:http://www.cnblogs.com/heaad/archive/2010/07/17/1779829.html 1.1 U-Boot工作过程 U-Boot启动内核的过程可 ...
- imx6 uboot启动流程分析
参考http://blog.csdn.net/skyflying2012/article/details/25804209 这里以imx6平台为例,分析uboot启动流程对于任何程序,入口函数是在链接 ...
- 【ARM-Linux开发】U-Boot启动过程--详细版的完全分析
---------------------------------------------------------------------------------------------------- ...
- uboot启动 及命令分析(3)
u-boot命令 先贴一个重要结构,位于uboot/include/command.h,这个结构代表每个uboot命令 struct cmd_tbl_s { char *name; /* ...
随机推荐
- 【NOIP2016提高A组五校联考1】挖金矿
题目 分析 我们二分答案 设\(sum_{i,j}\)表示的i列前个数的和, 假设当前出的二分答案为x,第i列挖了\(h_j\)层,则 \[\dfrac{\sum_{i=1}^{n}sum_{i,h_ ...
- java——AtomicInteger 中 incrementAndGet与getAndIncrement 两个方法的区别
https://blog.csdn.net/chenkaibsw/article/details/81031950 源码: getAndIncrement: public final int getA ...
- C/C++运算符优先级关系
C/C++优先级 从高到低 1~14梯队 1. () [] . -> 2. ! ~ -(负号) ++ -- &(取变量地址)* (type)(强制类型) ...
- sqlserver 返回刚插入的那条数据
insert into xxxxxx(Col_002,UrgentStatus,DoWorkShop,Col_004,Col_005,Col_006,Col_003,Col_007,postQQ,Co ...
- 计蒜客 A1607 UVALive 8512 [ACM-ICPC 2017 Asia Xi'an]XOR
ICPC官网题面假的,要下载PDF,点了提交还找不到结果在哪看(我没找到),用VJ交还直接return 0;也能AC 计蒜客题面 这个好 Time limit 3000 ms OS Linux 题目来 ...
- (63)通信协议之一json
1.什么是JSON JSON(JavaScript Object Notation) 是一种轻量级的数据交换格式.它基于JavaScript的一个子集. JSON采用完全独立于语言的文本格式,但是也使 ...
- sqli-labs(17)
0x01简介 百度翻译了一下 基于错误的更新查询 字符型 第一次遇到这种情况 那我们先看看源代码行吧 不懂函数的百度 $result = mysql_query($sql);//返回查询的数据的一个结 ...
- Js自定义数组map之bigmap
/** * like map,but prev,curr,next and index will be given * @param {Function} cb Callback,the parame ...
- iptables添加、删除端口
简洁才是王道, 下面是添加一个udp端口,端口号8566,即接收到8566端口的所有udp包 /sbin/iptables -I INPUT -p udp --dport -j ACCEPT 要删除这 ...
- (C++C#类型互转工具)使用Signature Tool自动生成P/Invoke调用Windows API的C#函数声明
在网上看到很多网友在.NET程序中调用Win32 API,或者调用自己的VC DLL里面提供的函数的时候,总是被生成正确的C函数在C#中的正确声明而困扰,而生成C++中结构体在C#中的声明 - 天,没 ...