角点检测和匹配——Harris算子
一、基本概念
角点corner:可以将角点看做两个边缘的交叉处,在两个方向上都有较大的变化。具体可由下图中分辨出来:
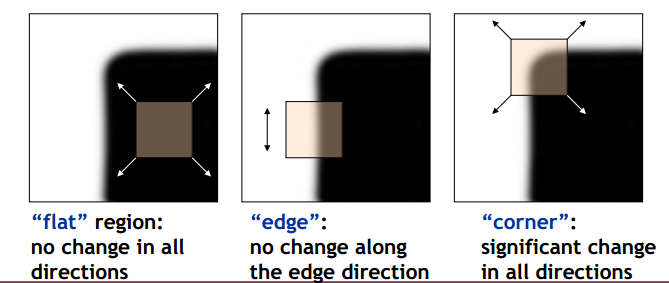
兴趣点interest point:兴趣点是图像中能够较鲁棒的检测出来的点,它不仅仅局限于角点. 也可以是灰度图像极大值或者极小值点等
二、Harris角点检测
Harris 算子是 Haris & Stephens 1988年在 "A Combined Corner and Edge Detector" 中提出的 提出的检测算法, 现在已经成为图像匹配中常用的算法.
对于一幅RGB图像我们很很容易得到corner 是各个方向梯度值较大的点, 定义 函数WSSD(Weighted Sum Squared Difference)为:
$$S(x,y) = \sum_{u} \sum_{v}w(u,v)(I((u+x,v+y)-I(u,v))^2 (1)$$
其中$w(u,v)$可以看作采样窗,可以选择矩形窗函数,也可以选择高斯窗函数:

$I(u+x,v+y)-I(u,v)$可以看作像素值变化量(梯度):
使用泰勒展开:$I(u+x,v+y) \approx I(u,v)+I_x(u,v)x+I_y(u,v)y (2)$
(1)代入(2) $S(x,y) \approx \sum_u \sum_v w(u,v) (I_x(u,v)x + I_y(u,v)y)^2$
写成$S(x,y) \approx (x,y) A (x,y)^T $
其中 A 为 二阶梯度矩阵(structure tensor/ second-moment matrix)
$$A = \sum_u \sum_v w(u,v) \begin{bmatrix} I_x^2& I_x I_y \\ I_x I_y & I_y^2 \end{bmatrix} $$
将A定义为Harris Matrix,A 的特征值有三种情况:
1. $\lambda_1 \approx 0, \lambda_2 \approx 0$,那么点$x$不是兴趣点
2. $\lambda_1 \approx 0, \lambda_2$为一个较大的正数, 那么点$x$为边缘点(edge)
3. $\lambda_1, \lambda_2$都为一个较大的正数, 那么点$x$为角点(corner)
由于特征值的计算是 computationally expensive,引入如下函数
$M_c = \lambda_1\lambda_2 - \kappa(\lambda_1+\lambda_2)^2 = det(A) - \kappa trace^2(A) $
为了去除加权常数$\kappa$ 直接计算
$M_{c}^{'} = \frac{det(A)}{trace(A)+\epsilon}$
三、角点匹配
Harris角点检测仅仅检测出兴趣点位置,然而往往我们进行角点检测的目的是为了进行图像间的兴趣点匹配,我们在每一个兴趣点加入descriptors描述子信息,给出比较描述子信息的方法. Harris角点的,描述子是由周围像素值块batch的灰度值,以及用于比较归一化的相关矩阵构成。
通常,两个大小相同的像素块I_1(x)和I_2(x) 的相关矩阵为:
$$c(I_1,I_2) = \sum_x f(I_1(x),I_2(x))$$
$f函数随着方法变化而变化,c(I_1,I_2)$值越大,像素块相似度越高.
对互相关矩阵进行归一化得到normalized cross correlation :
$$ncc(I_1,I_2) = \frac{1}{n-2} \sum_x \frac{(I_1(x)-\mu_1)}{\sigma_1} \cdot \frac{(I_2(x)-\mu_2)}{\sigma_2}$$
其中$\mu$为像素块的均值,\sigma为标准差. ncc对图像的亮度变化具有更好的稳健性.
四、python实现
python版本:2.7
依赖包: numpy,scipy,PIL, matplotlib
图片:
trees_002.jpg

trees003.jpg

from PIL import Image
from scipy.ndimage import filters
from numpy import *
from pylab import * def compute_harris_response(im,sigma=3):
"""Compute the Harris corner detector response function for each
pixel in a graylevel image.""" #derivative
imx = zeros(im.shape)
filters.gaussian_filter(im,(sigma,sigma),(0,1),imx) imy = zeros(im.shape)
filters.gaussian_filter(im,(sigma,sigma),(1,0),imy) #compute components of the Harris matrix Wxx = filters.gaussian_filter(imx*imx,sigma)
Wxy = filters.gaussian_filter(imx*imy,sigma)
Wyy = filters.gaussian_filter(imy*imy,sigma) #determinant and trace Wdet = Wxx*Wyy-Wxy**2
Wtr = Wxx+Wyy
return Wdet/Wtr def get_harris_points(harrisim,min_dist=10,threshold=0.1):
"""Return corners from a Harris response image min_dist is the
minimum number of pixels separating corners and image boundary.""" #find top corner candidates above a threshold
corner_threshold = harrisim.max()*threshold
harrisim_t = 1*(harrisim>corner_threshold) #get coordiantes of candidate
coords = array(harrisim_t.nonzero()).T #...and their valus
candicates_values = [harrisim[c[0],c[1]] for c in coords] #sort candicates
index = argsort(candicates_values) #sort allowed point loaction in array
allowed_location = zeros(harrisim.shape)
allowed_location[min_dist:-min_dist,min_dist:-min_dist] = 1 #select the best points taking min_distance into account
filtered_coords = []
for i in index:
if allowed_location[coords[i,0],coords[i,1]]==1:
filtered_coords.append(coords[i])
allowed_location[(coords[i,0]-min_dist):(coords[i,0]+min_dist),
(coords[i,1]-min_dist):(coords[i,1]+min_dist)]=0
return filtered_coords def plot_harris_points(image,filtered_coords):
"""plots corners found in image."""
figure
gray()
imshow(image)
plot([p[1] for p in filtered_coords],[p[0] for p in filtered_coords],'*')
axis('off')
show() def get_descriptors(image,filter_coords,wid=5):
"""For each point return pixel values around the point using a neihborhood
of 2*width+1."""
desc=[]
for coords in filter_coords:
patch = image[coords[0]-wid:coords[0]+wid+1,
coords[1]-wid:coords[1]+wid+1].flatten()
desc.append(patch) # use append to add new elements
return desc def match(desc1,desc2,threshold=0.5):
"""For each corner point descriptor in the first image, select its match
to second image using normalized cross correlation.""" n = len(desc1[0]) #num of harris descriptors
#pair-wise distance
d = -ones((len(desc1),len(desc2)))
for i in range(len(desc1)):
for j in range(len(desc2)):
d1 = (desc1[i]-mean(desc1[i]))/std(desc1[i])
d2 = (desc2[j]-mean(desc2[j]))/std(desc2[j])
ncc_value = sum(d1*d2)/(n-1)
if ncc_value>threshold:
d[i,j] = ncc_value ndx = argsort(-d)
matchscores = ndx[:,0] return matchscores def match_twosided(desc1,desc2,threshold=0.5):
"""two sided symmetric version of match()."""
matches_12 = match(desc1,desc2,threshold)
matches_21 = match(desc2,desc1,threshold) ndx_12 = where(matches_12>=0)[0]
print ndx_12.dtype
# remove matches that are not symmetric
for n in ndx_12:
if matches_21[matches_12[n]] !=n:
matches_12[n] = -1
return matches_12 def appendimages(im1,im2):
"""Return a new image that appends that two images side-by-side.""" #select the image with the fewest rows and fill in enough empty rows
rows1 = im1.shape[0]
rows2 = im2.shape[0] if rows1<rows2:
im1 = concatenate((im1,zeros((rows2-rows1,im1.shape[1]))),axis=0)
elif rows1<rows2:
im2 = concatenate((im2,zeros((rows1-rows2,im2.shape[1]))),axis=0)
return concatenate((im1,im2),axis=1)
def plot_matches(im1,im2,locs1,locs2,matchscores,show_below=True):
"""show a figure with lines joinging the accepted matches
Input:im1,im2(images as arrays),locs1,locs2,(feature locations),
metachscores(as output from 'match()'),
show_below(if images should be shown matches)."""
im3 = appendimages(im1,im2)
if show_below:
im3 = vstack((im3,im3)) imshow(im3) cols1 = im1.shape[1]
for i,m in enumerate(matchscores):
if m>0:
plot([locs1[i][1],locs2[m][1]+cols1],[locs1[i][0],locs2[m][0]],'c')
axis('off') """
im = array(Image.open('F:/images/lena.bmp').convert('1'))
harrisim = compute_harris_response(im)
filtered_coords = get_harris_points(harrisim,6)
plot_harris_points(im,filtered_coords)
""" im1 = array(Image.open('trees_002.jpg').convert('L'))
im2 = array(Image.open('trees_003.jpg').convert('L')) wid = 5 harrisim = compute_harris_response(im1,5)
filtered_coords1 = get_harris_points(harrisim,wid+1)
d1 = get_descriptors(im1,filtered_coords1,wid) harrisim = compute_harris_response(im2,5)
filtered_coords2 = get_harris_points(harrisim,wid+1)
d2 = get_descriptors(im2,filtered_coords2,wid) print 'starting matching'
matches = match_twosided(d1,d2) figure()
gray()
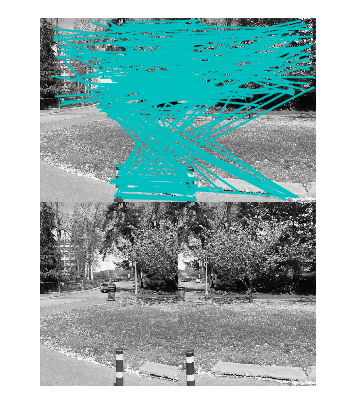
plot_matches(im1,im2,filtered_coords1,filtered_coords2,matches)
show()
运行结果:
角点检测和匹配——Harris算子的更多相关文章
- 【Computer Vision】角点检测和匹配——Harris算子
一.基本概念 角点corner:可以将角点看做两个边缘的交叉处,在两个方向上都有较大的变化.具体可由下图中分辨出来: 兴趣点interest point:兴趣点是图像中能够较鲁棒的检测出来的点,它不仅 ...
- 第十一节、Harris角点检测原理(附源码)
OpenCV可以检测图像的主要特征,然后提取这些特征.使其成为图像描述符,这类似于人的眼睛和大脑.这些图像特征可作为图像搜索的数据库.此外,人们可以利用这些关键点将图像拼接起来,组成一个更大的图像,比 ...
- opencv-角点检测之Harris角点检测
转自:https://blog.csdn.net/poem_qianmo/article/details/29356187 先看看程序运行截图: 一.引言:关于兴趣点(interest point ...
- OpenCV计算机视觉学习(13)——图像特征点检测(Harris角点检测,sift算法)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 前言 ...
- OpenCV-Python:Harris角点检测与Shi-Tomasi角点检测
一.Harris角点检测 原理: 角点特性:向任何方向移动变换都很大. Chris_Harris 和 Mike_Stephens 早在 1988 年的文章<A CombinedCorner an ...
- OpenCV教程(43) harris角的检测(1)
计算机视觉中,我们经常要匹配两幅图像.匹配的的方式就是通过比较两幅图像中的公共特征,比如边,角,以及图像块(blob)等,来对两幅图像进行匹配. 相对于边,角更适合描述图像特征, ...
- Harris角点及Shi-Tomasi角点检测(转)
一.角点定义 有定义角点的几段话: 1.角点检测(Corner Detection)是计算机视觉系统中用来获得图像特征的一种方法,广泛应用于运动检测.图像匹配.视频跟踪.三维建模和目标识别等领域中.也 ...
- 【OpenCV】角点检测:Harris角点及Shi-Tomasi角点检测
角点 特征检测与匹配是Computer Vision 应用总重要的一部分,这需要寻找图像之间的特征建立对应关系.点,也就是图像中的特殊位置,是很常用的一类特征,点的局部特征也可以叫做“关键特征点”(k ...
- 角点检测:Harris角点及Shi-Tomasi角点检测
角点 特征检测与匹配是Computer Vision 应用总重要的一部分,这需要寻找图像之间的特征建立对应关系.点,也就是图像中的特殊位置,是很常用的一类特征,点的局部特征也可以叫做“关键特征点”(k ...
随机推荐
- vue实例的几个概念
1.构造器 vue应用都是通过vue构造函数创建实例来启动的,在创建vue实例时需要传入一个options对象,该对象可以包含数据.模板.挂在元素.方法.生命周期钩子等选项: var vm = new ...
- javascript基础-DOM原理
解释清楚DOM原理并不是一件容易的事,但是任何一个前端工程师,都必须牢牢掌握它. DOM整体架构: 图解: DOM,即针对XML文档的应用程序编程接口(API).通俗一点说,HTML属于XML的一种, ...
- 读Zepto源码之操作DOM
这篇依然是跟 dom 相关的方法,侧重点是操作 dom 的方法. 读Zepto源码系列文章已经放到了github上,欢迎star: reading-zepto 源码版本 本文阅读的源码为 zepto1 ...
- Linux OS共享文件
背景: 相较于windows.unix等OS,Linux因为其开源.安全.稳定.性能优越等优点,已越来越受到互联网的青睐.而我们在学习和使用Linux也就会考虑到Linux机器和我们日常用的windo ...
- Java中的系统时间
System.currentTimeMillis()产生一个当前的毫秒,这个毫秒其实就是自1970年1月1日0时起的毫秒数,Date()其实就是相当于Date(System.currentTimeMi ...
- 在附件管理模块中增加对FTP 上传和预览的支持
在之前介绍的附件管理模块里面<Winform开发框架之通用附件管理模块>以及<Winform开发框架之附件管理应用>,介绍了附件的管理功能,通过对数据库记录的处理和文件的管理, ...
- JavaScript实现单击全选 ,再次点击取消全选
以下为实现思路,已测试,供参考 var allSet = document.getElementById('allSet');//获取全选按钮元素 var a = allSe ...
- mysql too many connections 问题
我的处理步骤: 第一步:首次确定你的服务可不可以重启,如果可以重启转第二步,如果不可以重启转第三步,这个主要考虑已经部署到客户现场或者正在使用中的数据库不能重启. 第二步:查找mysql的安装路径,这 ...
- cadence pcb 设计学习记录提纲
Cadence软件是一款"一站式"的电气EDA软件系统.因能力所限,此处仅涉及使用cadence软件绘制PCB.日后随着对软件使用程度的加深,自己打算学习使用cadence软件的原 ...
- UIButton图片文字控件位置自定义(图片居右文字居左、图片居中文字居中、图片居左文字消失等)
在开发中经常会碰到需要对按钮中的图片文字位置做调整的需求.第一种方式是通过设置按钮中图片文字的偏移量.通过方法setTitleEdgeInsets和setImageEdgeInsets实现 代码如下: ...