(CVPR 2019)The better version of SRMD
CVPR2019的文章,解决SRMD的诸多问题,
并进行模拟实验。
进行双三次差值(bicubic)===>对应matlab imresize()
%% read images
im = {};
scale_factor = 6;
im_ = dir('E:\A_paper\TEM降噪用GAN\matlab_codes\images\*.jpg');
path = ['E:\A_paper\TEM降噪用GAN\matlab_codes\images\',im_(1).name];
im{1} = imread(path);
if size(im{1},3) > 1
im{1} = rgb2gray(im{1});
im{1} = im{1}(:,:,1);
end
%% bicubic interpolation
img_up = imresize(im{1}, scale_factor, 'bicubic');
img_down = imresize(im{1}, 1/scale_factor, 'bicubic');
%% image showing
figure,imshow(im{1});
figure,imshow(img_up);
figure,imshow(img_down);
对应的图片:
当scale_factor放大图像,图像更为平滑,而缩小图像,则更为模糊。
下采样原理(downsample):对于一幅图像I尺寸为$M*N$,对其进行s倍下采样,即得到$(M/s)*(N/s)$尺寸的得分辨率图像,当然s应该是M和N的公约数才行,如果考虑的是矩阵形式的图像,就是把原始图像s*s窗口内的图像变成一个像素,这个像素点的值就是窗口内所有像素的均值:
上采样原理(upsamle):图像放大几乎都是采用内插值方法,即在原有图像像素的基础上在像素点之间采用合适的插值算法插入新的元素。
插值方法---- 代表Bicubic
双线性插值法具有平滑功能,能有效地克服邻法的不足,但会退化图像的高频部分,使图像细节变模糊。在放大倍数比较高时,高阶插值,如双三次和三次样条插值等比低阶插值效果好。这些插值算法可以使插值生成的像素灰度值延续原图像灰度变化的连续性,从而使放大图像浓淡变化自然平滑。但是在图像中,有些像素与相邻像素间灰度值存在突变,即存在灰度不连续性。这些具有灰度值突变的像素就是图像中描述对象的轮廓或纹理图像的边缘像素。在图像放大中,对这些具有不连续灰度特性的像素,如果采用常规的插值算法生成新增加的像素,势必会使放大图像的轮廓和纹理模糊,降低图像质量。
缺点:
采用了LF的思想,易出现过度平滑,纹理和边缘信息丢失。
基于模型的优化算法
利用图像的先验信息(e.g.非局部相似先验 去噪先验--Learning deep CNN denoiser prior for ....张凯),通过求解目标函数的方式得到SR图像,但是比较耗时,
需要引入预先难受的超参数。
判别学习方法
依赖CNN强大的学习能力,利用大量的图像训练训练集进行训练,学习LR图像和HR图像之间的映射,
从而能够对于输入LR图像进行有效超分辨重构。但是这类模型都假设LR图像是由HR图像双三次插值得到,
当图像的退化方式与其不同时候,模型很难对于多退化的LR图像进行超分辨率。
图像评价指标
MSE和PSNR为考虑图像的感知特性和图像结构特征,基于图像结构特征比较的评价算法---结构相似度SSIM
,利用高斯滑动窗口的方法对图像进行分块,并利用高斯加权计算每个滑动窗口图像像素的均值、方差和协方差。
Discuss
现有的CNN模型,简单输入LR图像进行端到端训练,难对于模型求解,需要处理多退化因子的图像。
充分利用先验的方法
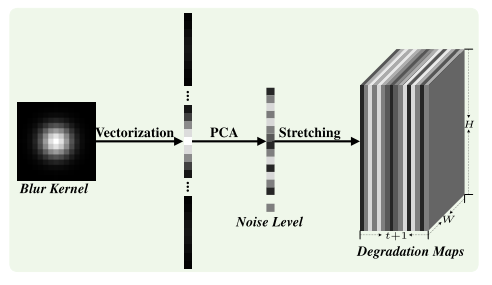
利用LR图像退化参数的先验信息帮助模型对于多退化图像的处理。但是存在几个问题,如何有效的表示退化信息,
并且将退化信息和LR图像维度进行统一(SRMD利用PCA降维以及矩阵平铺、复杂的升维方法,将退化图谱和LR图像
进行拼接,输入网络)。
充分利用全卷积和移除亚像素卷积层
对于处理多尺度超分辨率问题,亚像素卷积层进行上采样需要对输入的$W*H*S^{2}C$大小的张量进行像素重排,从而得到s
$sW*sH*C$大小的输出图像,每个尺度的超分辨率任务需要单独训练。(直接反卷积其实存在一些问题)
直接除去亚像素卷积层,而变为全卷积层,使输入和输出的尺度直接对应于缩放的尺度:直接将LR图像进行插值上采样
得到与目标图像大小相同的尺寸,输入网络。
什么是亚像素卷积层?

在亚像素卷积层前的卷积层,将输出通道变为缩放尺度的平方,在亚像素卷积层得到想要的尺度。
获得LR图像退化方法
SRMD仅仅能够在LR图像退化方法已知的图像超分辨任务中。
训练策略
每个epoch都训练x2、x3、x4的尺度因子,避免选择遗忘。
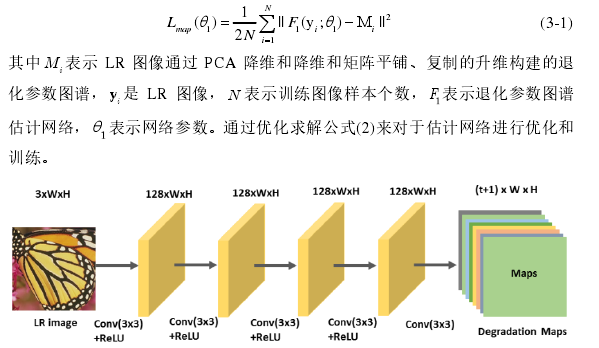
基于卷积神经网络的退化参数图谱估计模型
将LR图像直接输入估计网络,输入$W*H*3$输出得到$W*H*(t+1)$
在估计到退化图谱后,使用PCA降维和矩阵平铺,复制的升维方法构建处退化图谱作为标签进行构建损失函数
中间卷积可以使用Resnet残差学习思想:

多个网络级联训练

整体损失:
$L(\theta_{1},\theta_{2}) = L_{map}(\theta_{1})+\lambda L_{convnet}(\theta_{1},\theta_{2})$
$L_{convnet}$使训练超分辨率子网络,$\theta_{2}$表示超分辨率子网络参数,$L_{map}$表示退化图谱重构
损失,用来约束训练退化图谱估计子网络。
两个损失都是MSE损失,但是两个网络可以不单独级联,而是作为一个整体网络训练,将两个网络的参数同时
优化,来自超分辨率的梯度也会传递到退化图谱估计网络,线性相加,$\lambda$是平衡两个损失的权值。
该网络更依赖退化图谱网络计算的梯度权值相对于由来自深层超分辨网络的梯度更大一些,$\lambda$为0.1
,增加退化图谱的损失权值,便于更好优化退化图谱估计子网络。
需要学些PCA降维部分的内容
(CVPR 2019)The better version of SRMD的更多相关文章
- Feature Fusion for Online Mutual Knowledge Distillation (CVPR 2019)
一.解决问题 如何将特征融合与知识蒸馏结合起来,提高模型性能 二.创新点 支持多子网络分支的在线互学习 子网络可以是相同结构也可以是不同结构 应用特征拼接.depthwise+pointwise,将特 ...
- CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)
CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)1. 目标检测:FCOS(CVPR 2019)目标检测算法FCOS(FCOS: ...
- Relation-Shape Convolutional Neural Network for Point Cloud Analysis(CVPR 2019)
代码:https://github.com/Yochengliu/Relation-Shape-CNN 文章:https://arxiv.org/abs/1904.07601 作者直播:https:/ ...
- CVPR 2019轨迹预测竞赛冠军方法总结
背景 CVPR 2019 是机器视觉方向最重要的学术会议,本届大会共吸引了来自全世界各地共计 5160 篇论文,共接收 1294 篇论文,投稿数量和接受数量都创下了历史新高,其中与自动驾驶相关的论文. ...
- CVPR 2019 行人检测新思路:
CVPR 2019 行人检测新思路:高级语义特征检测取得精度新突破 原创: CV君 我爱计算机视觉 今天 点击我爱计算机视觉置顶或标星,更快获取CVML新技术 今天跟大家分享一篇昨天新出的CVPR 2 ...
- 自动驾驶研究回顾:CVPR 2019摘要
我们相信开发自动驾驶技术是我们这个时代最大的工程挑战之一,行业和研究团体之间的合作将扮演重要角色.由于这个原因,我们一直在通过参加学术会议,以及最近推出的自动驾驶数据集和基于语义地图的3D对象检测的K ...
- CVPR 2019细粒度图像分类竞赛中国团队DeepBlueAI获冠军 | 技术干货分享
[导读]CVPR 2019细粒度图像分类workshop的挑战赛公布了最终结果:中国团队DeepBlueAI获得冠军.本文带来冠军团队解决方案的技术分享. 近日,在Kaggle上举办的CVPR 201 ...
- ES10(2019)有哪些更新和新特性?
ES10新特性(2019) 行分隔符(U + 2028)和段分隔符(U + 2029)符号现在允许在字符串文字中,与JSON匹配 更加友好的 JSON.stringify 新增了Array的flat( ...
- CVPR 2019|PoolNet:基于池化技术的显著性检测 论文解读
作者 | 文永亮 研究方向 | 目标检测.GAN 研究动机 这是一篇发表于CVPR2019的关于显著性目标检测的paper,在U型结构的特征网络中,高层富含语义特征捕获的位置信息在自底向上的传播过 ...
随机推荐
- breakpad系列(1)——起步
原文来自breakpad目录中doc目录下的getting_started_with_breakpad文档,建议去看原文! 介绍 Breakpad是一个比Linux core机制更强大的.用于记录程序 ...
- 大白话谈JVM的类加载机制
前言 我们很多小伙伴平时都是做JAVA开发的,那么作为一名合格的工程师,你是否有仔细的思考过JVM的运行原理呢. 如果懂得了JVM的运行原理和内存模型,像是一些JVM调优.垃圾回收机制等等的问题我们才 ...
- RabbitMQ 3.6.12延迟队列简单示例
简介 延迟队列存储的消息是不希望被消费者立刻拿到的,而是等待特定时间后,消费者才能拿到这个消息进行消费.使用场景比较多,例如订单限时30分钟内支付,否则取消,再如分布式环境中每隔一段时间重复执行某操作 ...
- 「面试」拿到B站的意向书
此次B站服务端开发面试之旅可谓惊险,不过通过对大部分面试题套路的掌握,不出意外还是拿下了,下面我们来看看这些骚题是不是常见的不能再常见的了.这些面试题看了就能面上?当然不是,只是通过这些题让自己知道所 ...
- 如何使用微软提供的TCHAR.H头文件?
转载:https://www.cnblogs.com/flyingspark/archive/2012/03/16/2399788.html 如何使用微软提供的TCHAR.H头文件? 如果你现在写的代 ...
- VS中OpenCV用imread读取不到图片
转自:https://blog.csdn.net/u012423865/article/details/78116059 在VS中OpenCV用imread读取不到图片 今天在Visual Studi ...
- Python中list的合并
①差集 方法一: if __name__ == '__main__': a_list = [{'a' : 1}, {'b' : 2}, {'c' : 3}, {'d' : 4}, {'e' : ...
- 一文带你定制unittest测试用例的名称
在之前的文章中,我在之前的文章中提到过,这里呢,考虑后,感觉之前的写法不够优雅,于是乎呢,我自己抽空去研究了下,主要是新写方法,这样呢,以后的要使用的时候,可以直接去使用,而不是每次换个环境就要修改环 ...
- centos 7 安装docker 常用指令
什么是docker l 使用最广泛的开源容器引擎 l 一种操作系统级的虚拟化技术 l 依赖于Linux内核特性:Namespace和Cgroups l 一个简单的应用程序打包工具 docker ...
- java流程控制学习
Java流程控制 计算的步骤就是算法. 1.用户交互Scanner next()不能得到带有空格的字符串.[它是以空格为结束符]nextline()可以,[它是以回车为结束符] 2.顺序结构 从上到下 ...