rbx1包里机器人仿真程序的实践
roslaunch rbx1_nav fake_move_base_map_with_obstacles.launch

不行,出错
一次只能朝向一个方向行走


rosrun rbx1_nav move_base_square.py
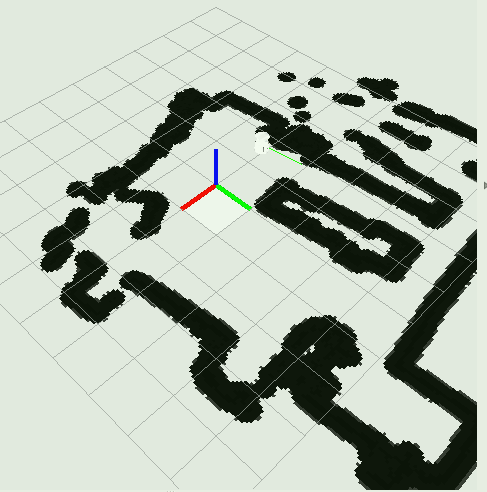
roslaunch rbx1_nav fake_amcl.launch map:=test_map.yaml

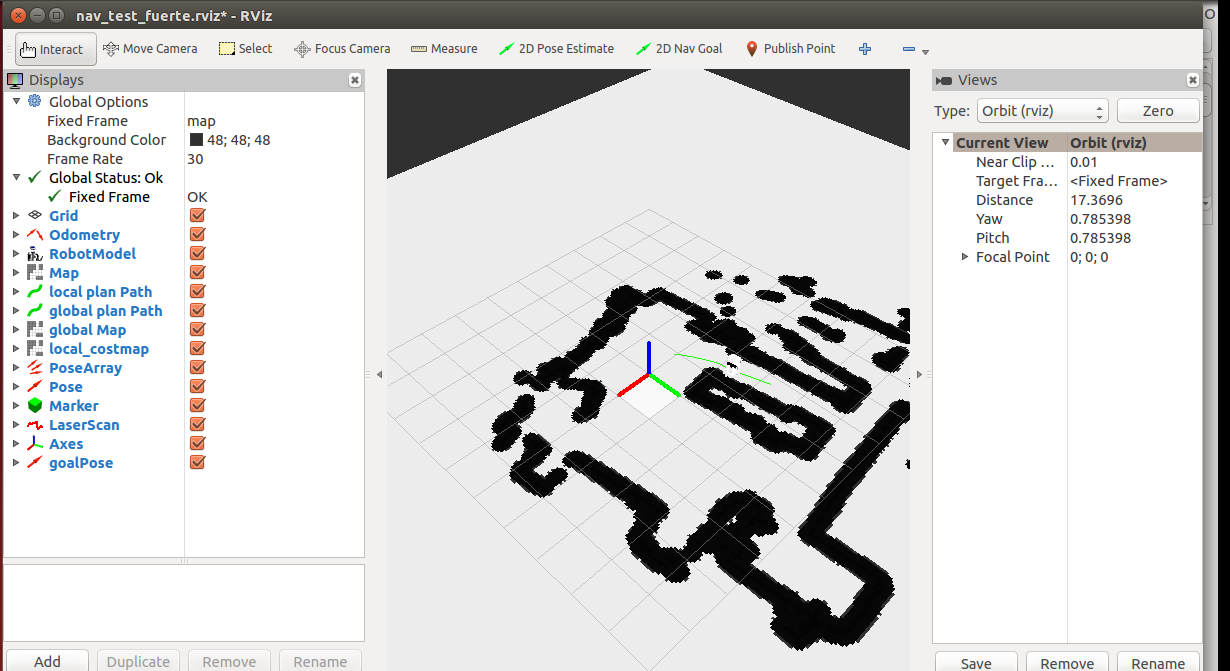
然后运行rviz
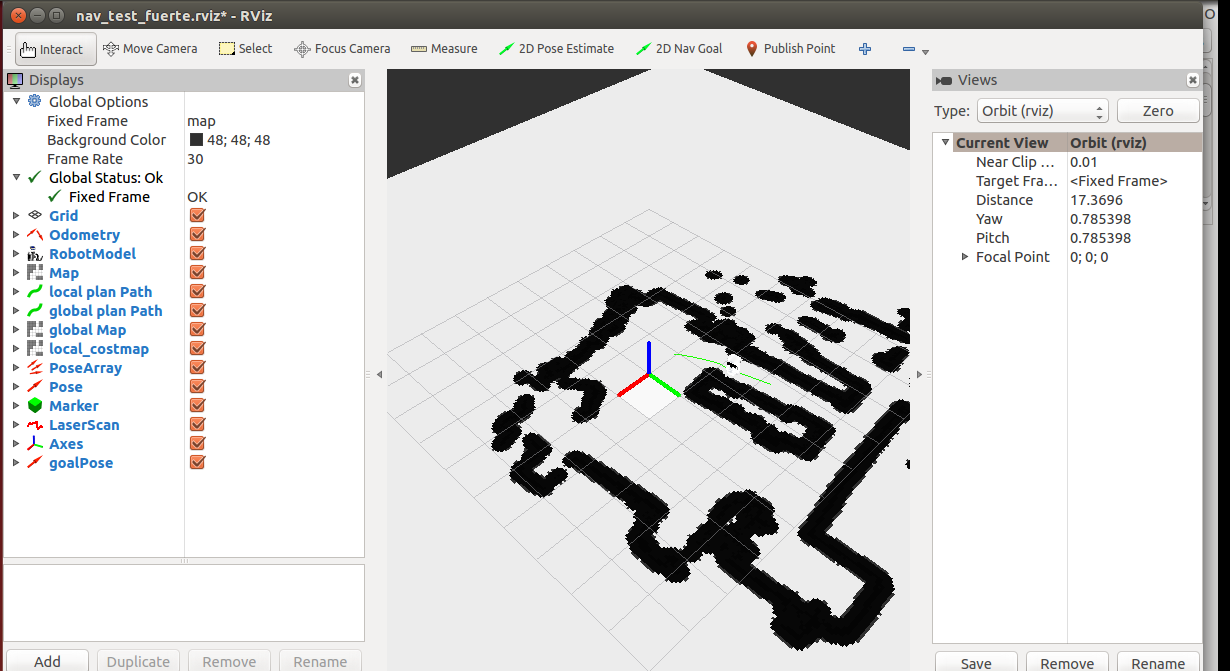
rosrun rviz rviz -d `rospack find rbx1_nav`/nav_fuerte.rviz

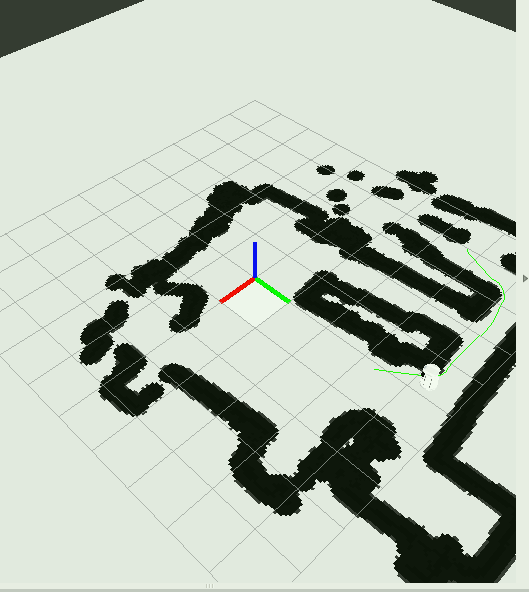

roslaunch rbx1_nav fake_amcl.launch map:=test_map.yaml
rosrun rviz rviz -d `rospack find rbx1_nav`/nav_fuerte.rviz




4.

rbx1包里机器人仿真程序的实践的更多相关文章
- [Android Pro] Android Support 包里究竟有什么
reference to : http://www.2cto.com/kf/201411/350928.html 随着 Android 5.0 Lollipop 的发布,Android 又为我们提供了 ...
- procps包里面的sysctl命令
procps包里面的sysctl命令 --http://www.cnblogs.com/createyuan/p/3740917.html?utm_source=tuicool&utm_med ...
- jar包里查找指定的class文件,排查是否存在或重复,工具软件:Java Class Finder
jar包里查找指定的class文件,排查是否存在或重复,工具软件:Java Class Finder 1,下载工具地址:www.idesksoft.com/classfinder.html,如图: 2 ...
- 直接修改别人jar包里面的class文件 工具:jclasslib
出于某些原因 需要把别人jar包里面的class修改一下信息 配置文件*.properties MANIFEST.MF 这些东西可以直接用记事本打开修改 然后替换掉就OK.. 在网上游荡了半天,没有找 ...
- 不安装rpm包,取出rpm包里的文件
1.查看rpm包里的文件 [root@VM_166_132 ~]# rpm -qlp mysql5.6.29-1-3.x86_64.rpm |more/etc/ld.so.conf.d/mysql-5 ...
- Java读取其他jar包里的配置文件
最近要做个东西,需要自己控制数据库的事物,项目封装的框架,实在是提不起去阅读的兴趣, 就想直接去读框架的底层实现里面的数据连接的配置文件(如:Url,port,username,password等), ...
- 更新jar包里的配置文件
更新jar包里的配置文件 起因 从笔记本传了个jar到服务器,运行的时候才发现配置文件一个ip项填错了.本来很简单的问题,maven重新打包就可以了,但是30多M的jar包就因为一个配置项错了又要重新 ...
- Java 操作jar包工具类以及如何快速修改Jar包里的文件内容
需求背景:写了一个实时读取日志文件以及监控的小程序,打包成了Jar包可执行文件,通过我们的web主系统上传到各个服务器,然后调用ssh命令执行.每次上传前都要通过解压缩软件修改或者替换里面的配置文件, ...
- C#调用java包里的方法
用IKVM,步骤: 下载ikvmbin-7.2.4630.5.zip,解压,把bin目录所在路径加到环境变量path里 2.电脑开始->CMD,输入ikvmc –out:”输出dll文件的路径” ...
随机推荐
- spark-submit提交方式测试Demo
写一个小小的Demo测试一下Spark提交程序的流程 Maven的pom文件 <properties> <maven.compiler.source>1.7</maven ...
- 内网ip打洞-----p2p实现原理
网上找了非常多.代码大堆,原理讲清楚透彻的不多. 本人找几篇讲得好的来整理一下. 一片技术文章,最基本的讲清楚原理.假设再有完整的能执行的源码也可,关键是要把核心部分代码分析清楚. (1)问题的由来: ...
- [Python] SQLBuilder 演示样例代码
用Python写一个SQLBuilder.Java版能够从 http://www.java2s.com/Code/Java/Database-SQL-JDBC/SQLBuilder.htm 看到. 附 ...
- 使用FDTemplateLayout框架打造个性App
效果展示 project下载地址 · 进入构建结构 首先我们新建一个project 接下来我们拖进来一个Table View Controller,将Storyboard Entry Point指向我 ...
- ext tree展开时的一些技巧
加入子节点的时候.我们须要展开父节点.并选中刚加入好的节点. 这时候会有一个问题. 我用的ext-js-4.2起码有一种问题. 节点内部会混乱.要么多加一个. 要么层级会发生故障. 随后我发现一个窍门 ...
- MySQL 函数笔记
统计相关函数 COUNT和SUM函数使用小技巧 参考自: MySQL - Conditional COUNT with GROUP BY 在一个 SQL 中统计多个指标的个数: SELECT COUN ...
- 重读金典------高质量C编程指南(林锐)-------第六章 函数设计
函数设计最重要的无外乎两个方面,一个是函数的接口设计一个是内部实现的一些规则. 在C语言中,函数的参数和返回值的传递方式分为两种: 值传递与指针传递.而C++中,多了一个引用传递. 引用传递有些像指针 ...
- VueJS实现双向数据绑定:v-model
HTML <!DOCTYPE html> <html> <head> <meta charset="utf-8"> <titl ...
- C#按指定长度分割字符串
C#按指定长度分割字符串 这几天学习分析声音的波形数据,接收到的是十六进制的数据,需要将数据转换成十进制再绘图,这个过程涉及到字符串的分割,正好可以促进自己对C#相关知识的学习.说到分割字符串,我 ...
- Java开启/关闭tomcat服务器
© 版权声明:本文为博主原创文章,转载请注明出处 通过java代码实现Tomcat的开启与关闭 1.项目结构 2.CallTomcat.java package com.calltomcat.test ...