SimMechanics/Second Generation倒立摆模型建立及初步仿真学习
笔者最近捣鼓Simulink,发现MATLAB的仿真模块真的十分强大,以前只是在命令窗口敲点代码,直到不小心敲入simulink,就一发不可收拾。话说simulink的模块化建模确实方便,只要拖拽框框然后双击设置属性就可以慢慢堆建自己的模型,这一点我很中意(*^__^*) 。
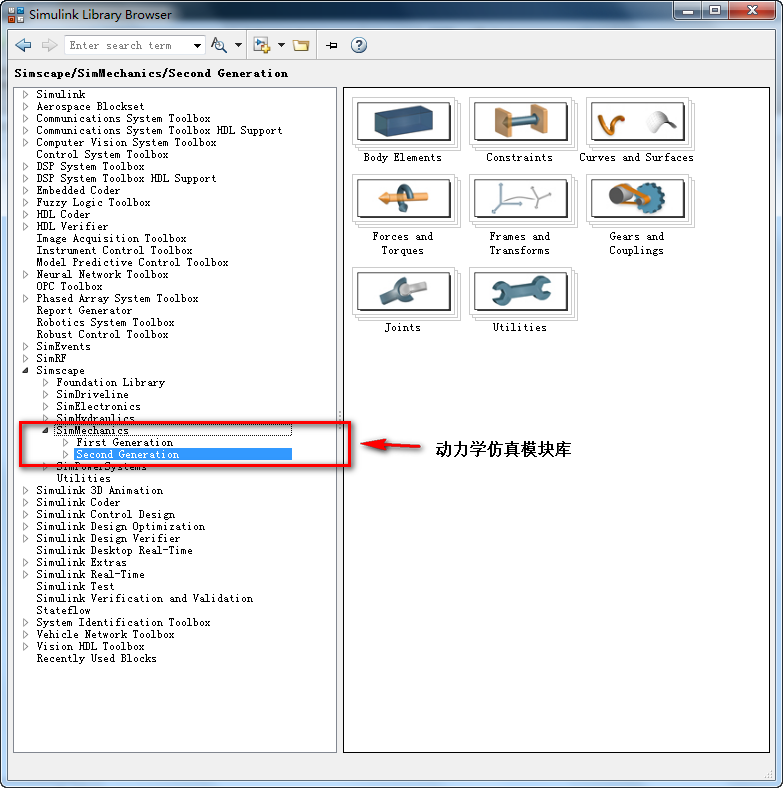
最近在学习一些控制理论,发现倒立摆是个不错的学习平台,开始学习肯定需要机构上面的运动学及动力学建模,一直习惯Adams进行运动仿真,但Adams安装比较繁琐。。。便想利用MATLAB代替仿真,顺便学习了解下传说的simulink,直接搜查阅资料。发现Simscape里面的simmechanics就是运动仿真模块。于是赶紧打开俺的MATLAB2015b,敲入simulink再用力敲打回车,就出现如下窗口。。。
一.新建一个模型New Model
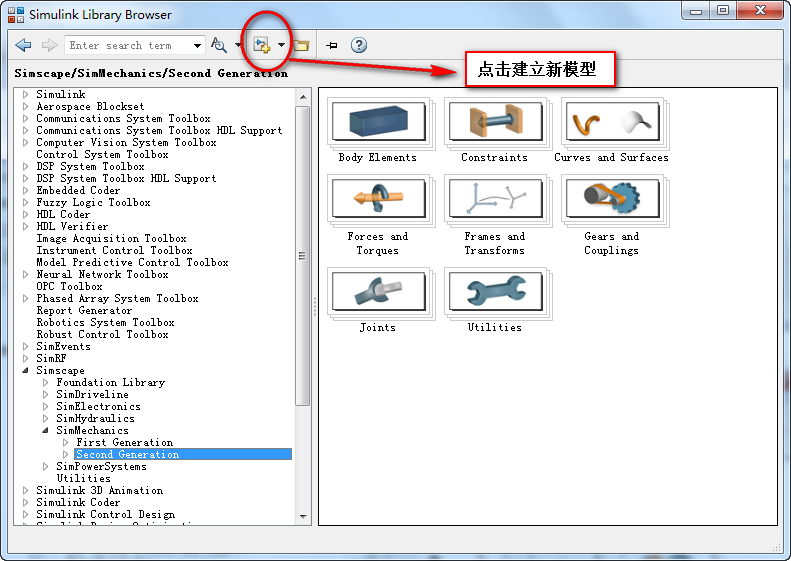
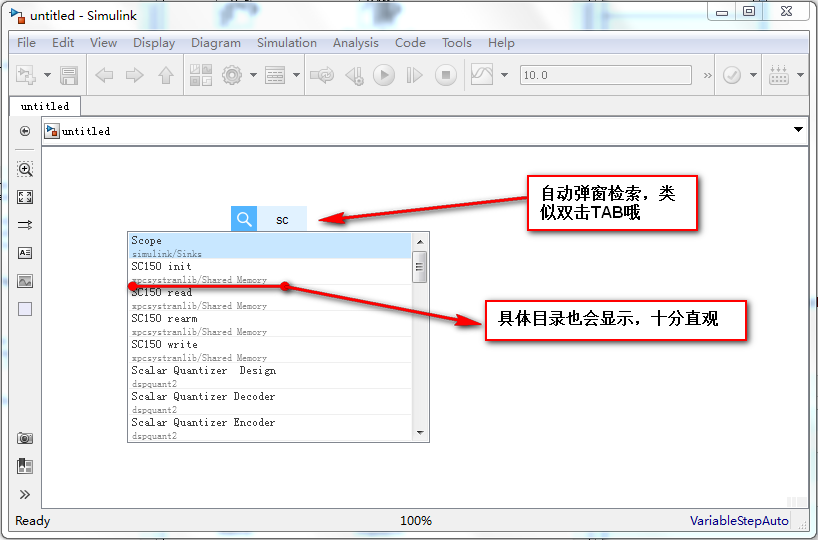
新建模型将出现空白界面,所有建模要用的block都必须拖到该界面进行设置和连接,因为模块库里Block特别的多,一个一个找真的特别麻烦,强烈建议记下常用block的名字,比如示波器scope,时钟clock,阶跃信号step等等等等,今后可以直接在模型空白处敲入字符,自动检索,真的是方便感人,如图。
二.SimMechanics/First Generation模型
需要注意的是,SimMechanics库分为First Generation和Second Generation,即第一代和第二代。
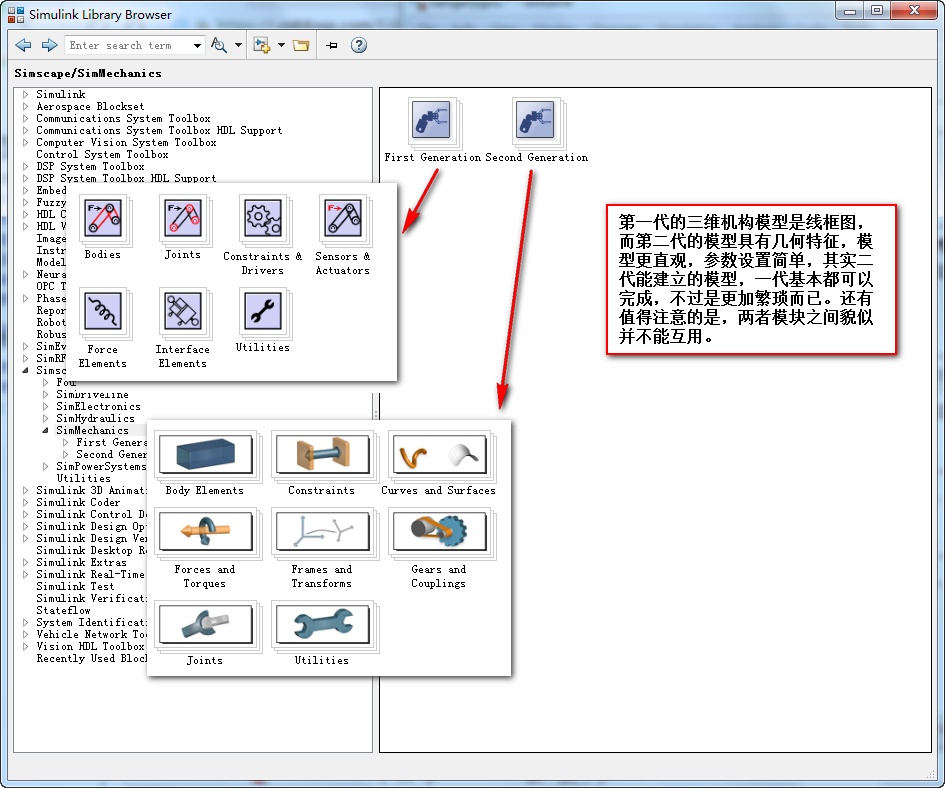
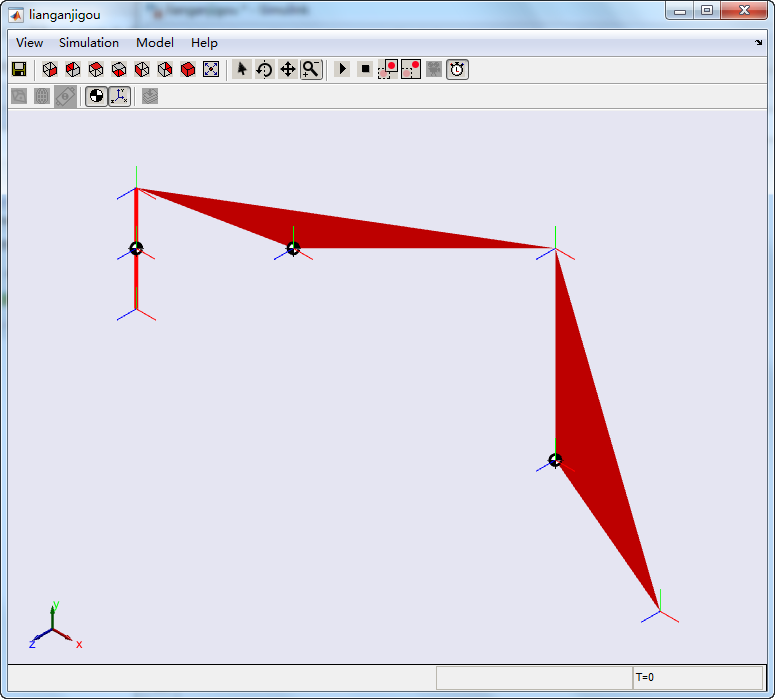
其实MATLAB帮助文档里面很多demo值得学习理解,我简单了解了第一代模块,跟着说明建立了一个平面四连杆机构模型,模块框图和仿真界面如下:
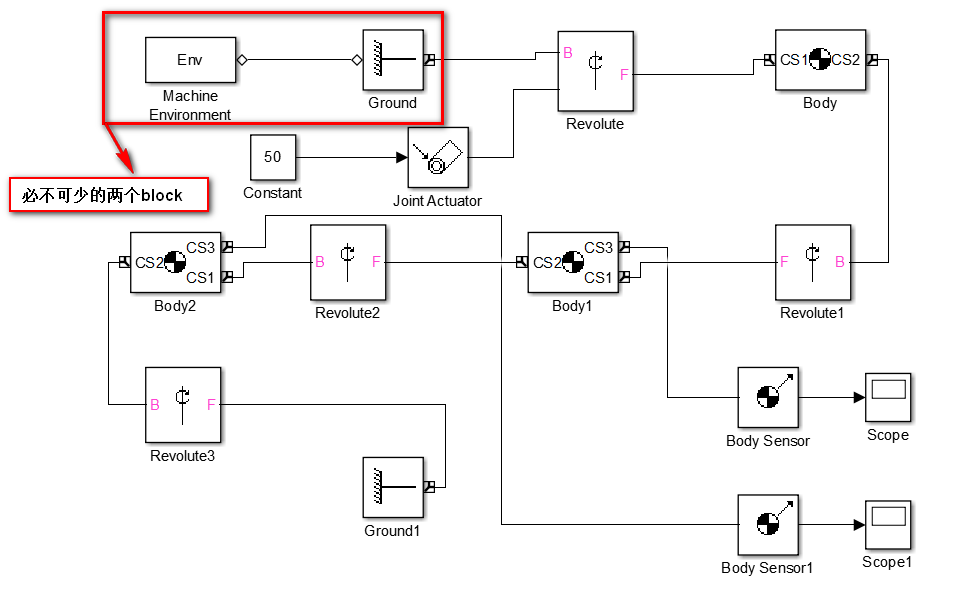
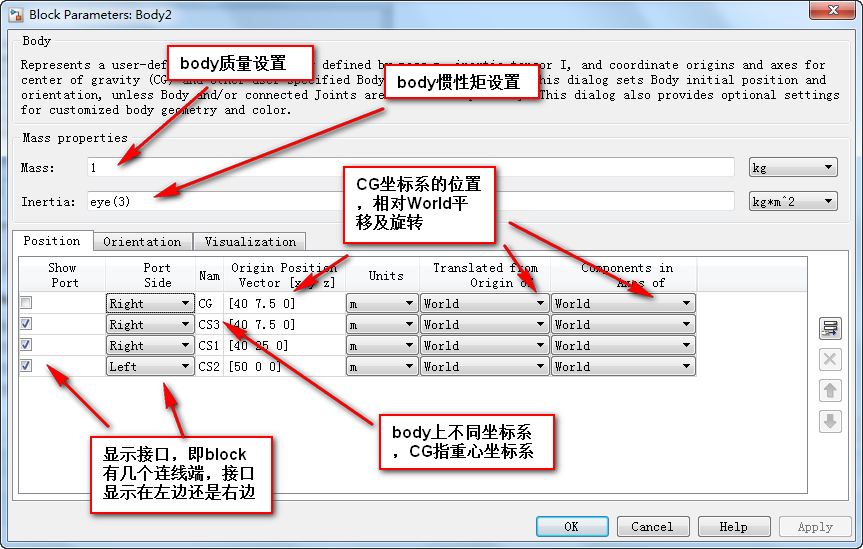
难点就是body block的属性设置,必须清楚了解坐标系的建立,新建的CS(coordinate system)相对哪个坐标平移,又相对哪个坐标旋转。其中World坐标系是世界坐标系,也就是绝对坐标系,所有的坐标系都是相对它而言的,所以说这个模块必不可少。
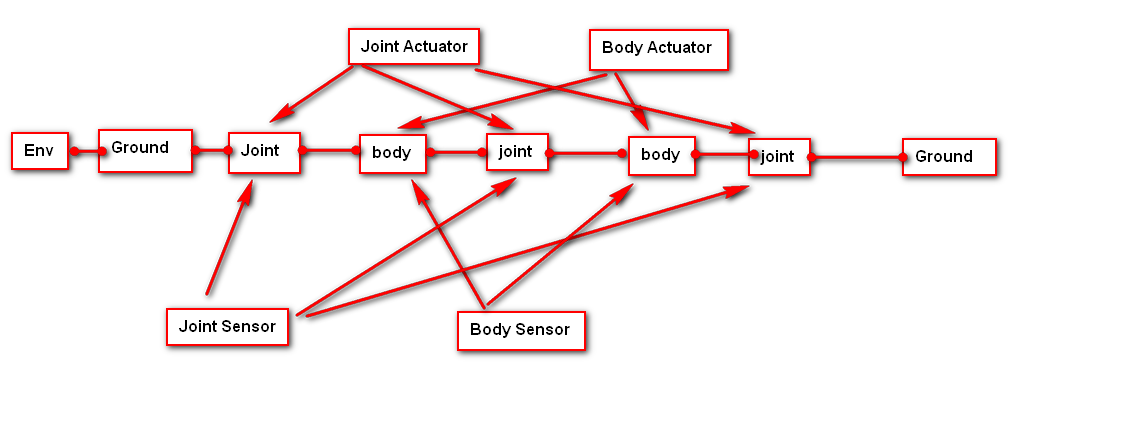
总之,模型的建立顺序一般如图,除了机械环境Env,其它的block连接都是坐标系与坐标系之间的连接,但body与body之间不能直接连接,必须通过joints确定两者之间的连接副。最后的body与地面连接就形成闭环机构,也可以只出现一个Ground,即悬空机构,像单摆运动,机械臂等只有基座与地面连接。当然也可以body与body之间形成闭环。Joint/Body Actuator 是连接副和机构驱动器,发送信号可以向Joint或者body添加动力或运动;同理有Joint和Body的Sensor,即传感器,可以利用scope示波器观察Joint和body的受力情况和运动规律。
三.SimMechanics/Second Generation模型
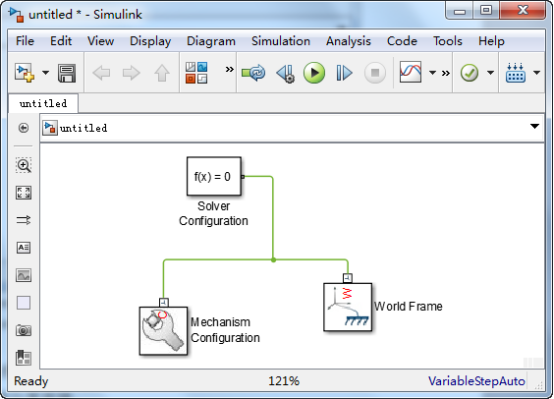
第二代模型比较直观,可以直接建立几何特征,solid代替了一代的body,可以直接从中设置很多属性。参考MATLAB的demo模型,在使用 second generation建立机构模型时,必须添加的模块有
1) solver configuration求解器配置块,是进行求解的必须模块,双击可以配置具体求解方式。
2) world frame 世界坐标系,其它一切坐标系都要直接或间接与其连接。
3)mechanism configuration 机构配置块,双击打开可以修改重力的大小和方向等。
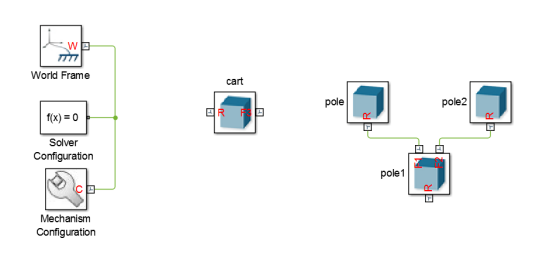
为了建立倒立摆,我打算添加两个构件,一个是小车构件,记为cart,质量设置在重心处,与地面(世界坐标系)为滑块连接(移动副),几何外形简化为为长方体;另一个是倒立杆构件,记为pole,质量在最高处,与小车进行旋转副连接,外形简化为圆柱体。
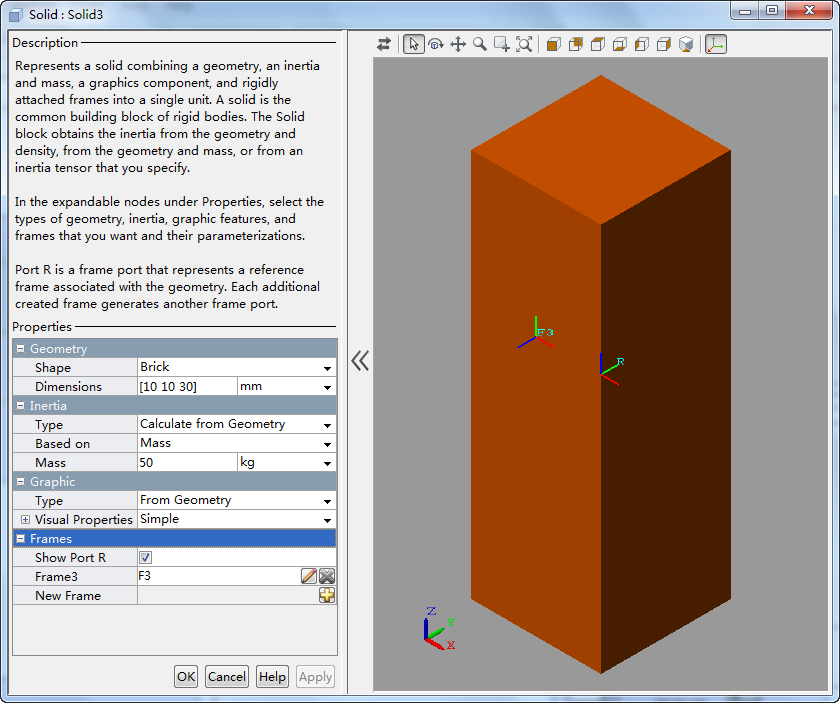
几何体的建立模块为solid,如下图,参数编辑窗口分为Description和Properties两栏,描述的内容十分有阅读价值,了解其属性才能设置好具体参数,以下是小车机构的属性设置:
小车构件新建了一个Frames,在第二代SIMmechanics里面坐标系用Frames表示,一个零件可以添加多个Frame,并且两个Frame之间可以直接连线进行刚性连接,中间可以不用joint进行连接,如下图,我把倒立杆的外形润色了一下:
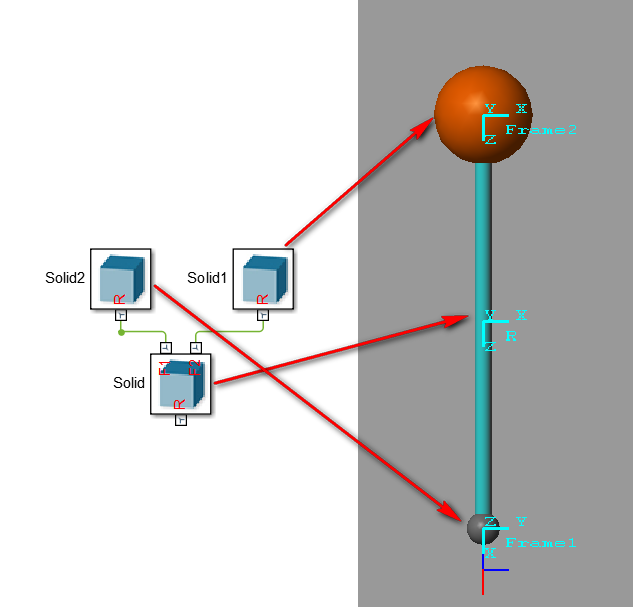
现在的模块窗口有以下Block,直接连接的话就是和World Frame作刚性连接,那么整个机构将是静止不动的,所以接下来是Joint block的添加。
接下来是比较重要的连接模块,即连接副的选择,如下是库里面提供的连接副:
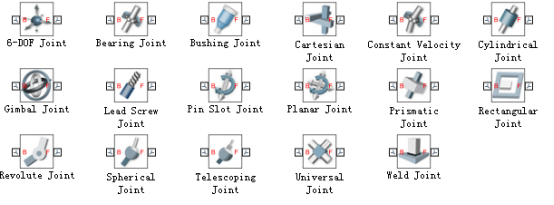
单级直线倒立摆的机构只需两个连接副,即revolute joint(平面旋转副)和prismatic joint(柱形滑块副),将其拖入窗口进行属性设置和连接。属性设置窗口如下:
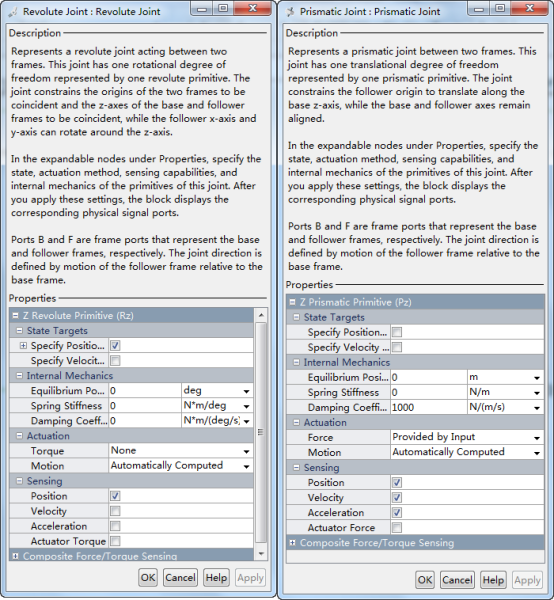
如上图所示,两个副的设置窗口比较复杂,必须仔细阅读Description里面的内容,本模型设计了阻尼系数,并且打开了Sensing接口,这样可以通过采集两个副的位置,速度,加速度等运动参数。最后方框图如下:
连接模块直接进行仿真的话会弹出如下窗口,重力的默认方向是world frame的-z方向,所以模拟会发生异常,图示整个机构会自由落体向下。。。。
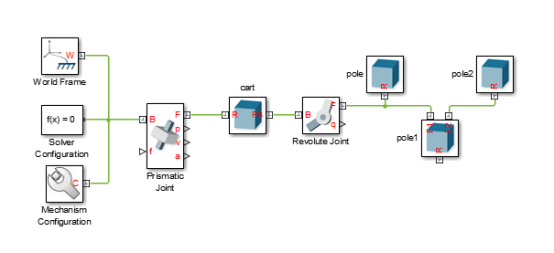
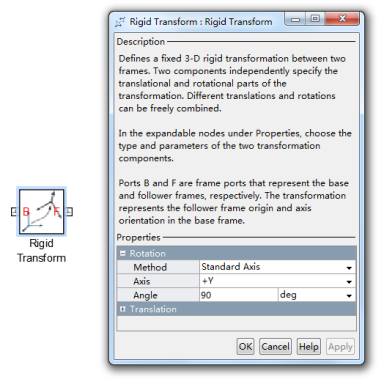
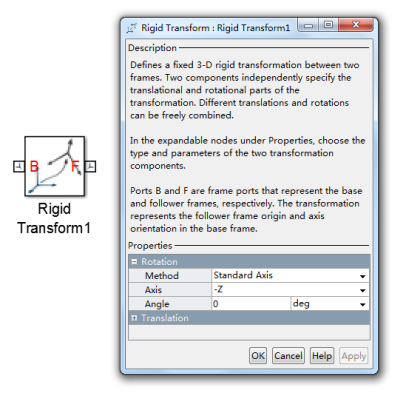
所以必须引入参考系模块,如下图。这个才是设置难点,因为每个坐标系的连接和参考都不同,为了找到合适的方向和位移,必须记牢每个坐标系关于世界坐标系的方位,也可能是英语看的人头疼,我在这里设置了好久。第一个rigid transform是让移动副相对world frame的+y方向旋转90度,第二个rigid transform的引入是可以改变摆杆的初始位置。
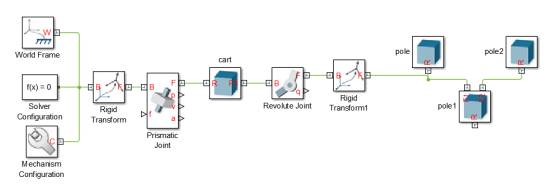
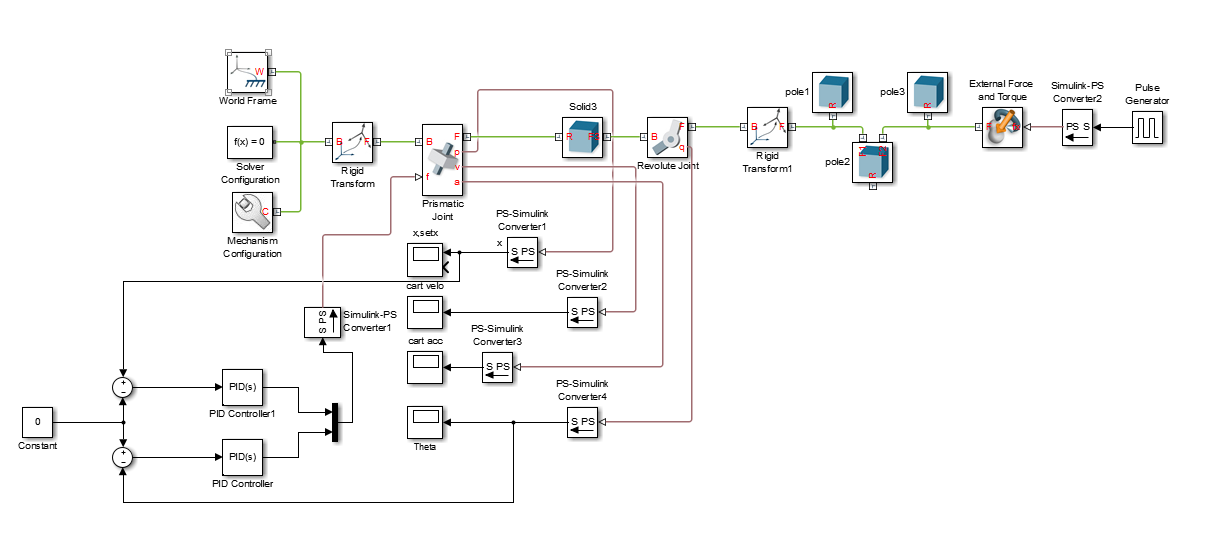
连接后的模型框图为
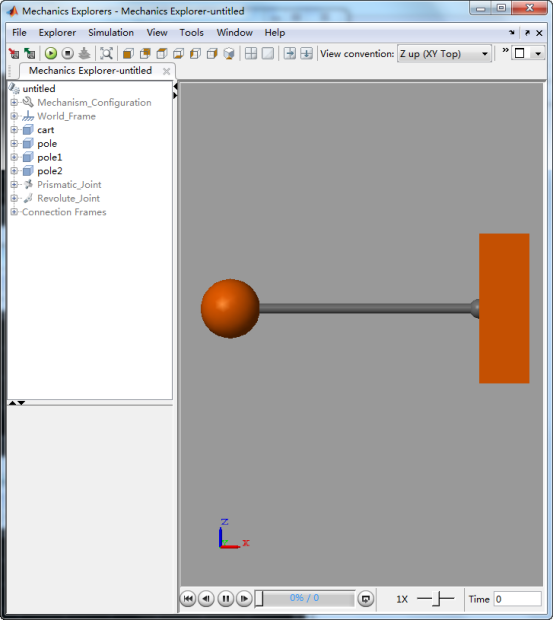
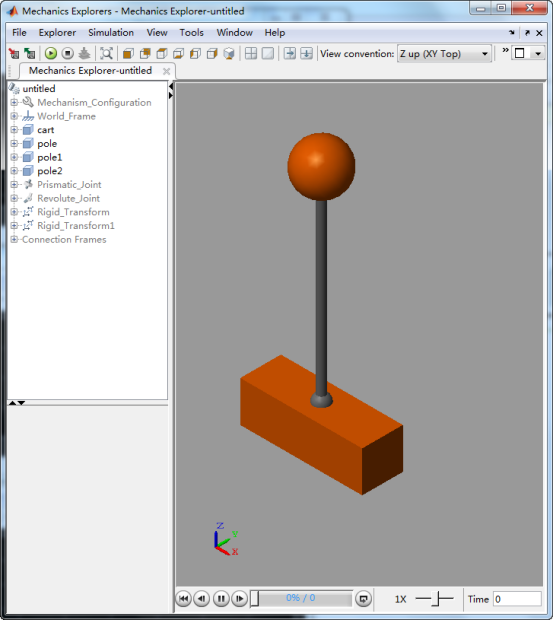
仿真界面如下
为了显示运动参数,可以添加示波器,不过示波器显示的是信号量,必须将运动副的sensor接口连接到PS-Simulink Converter转为信号量,如下图:

仿真结果为

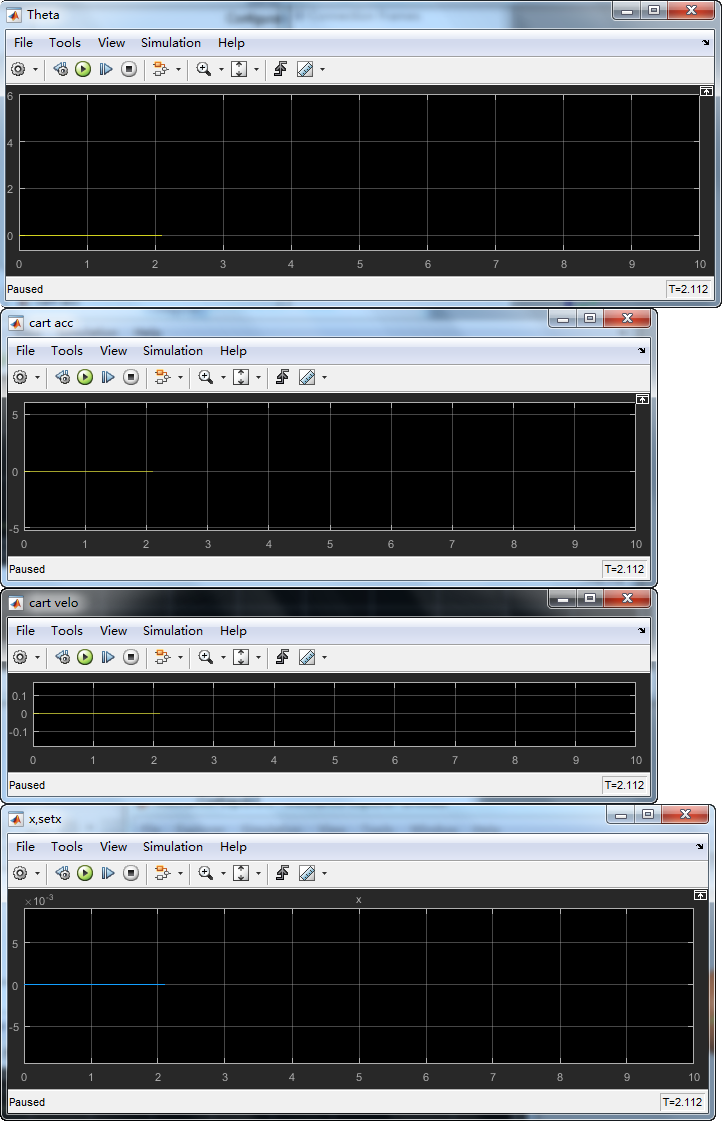
因为设置的初始角度为竖直向上,所以装置静止,信号稳定输出为水平线,所以接下来添加外力模块如图,同理需要将方波信号转为物理信号,模拟在一秒时给摆杆质心一个推力,推力设置为x方向。
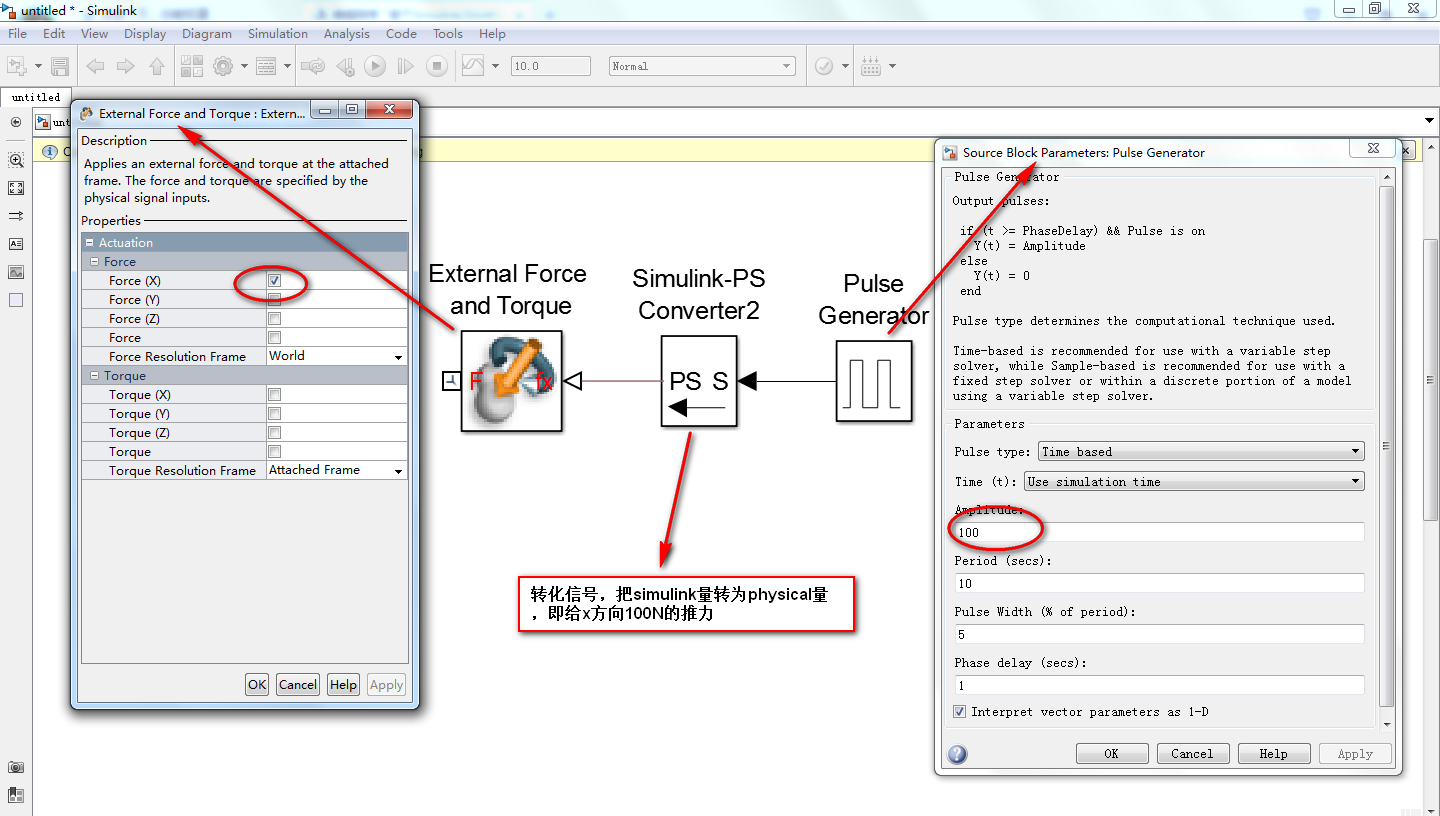
最后模型框图为:

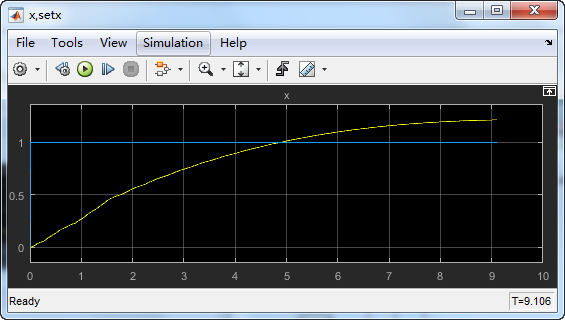
仿真结果如下:
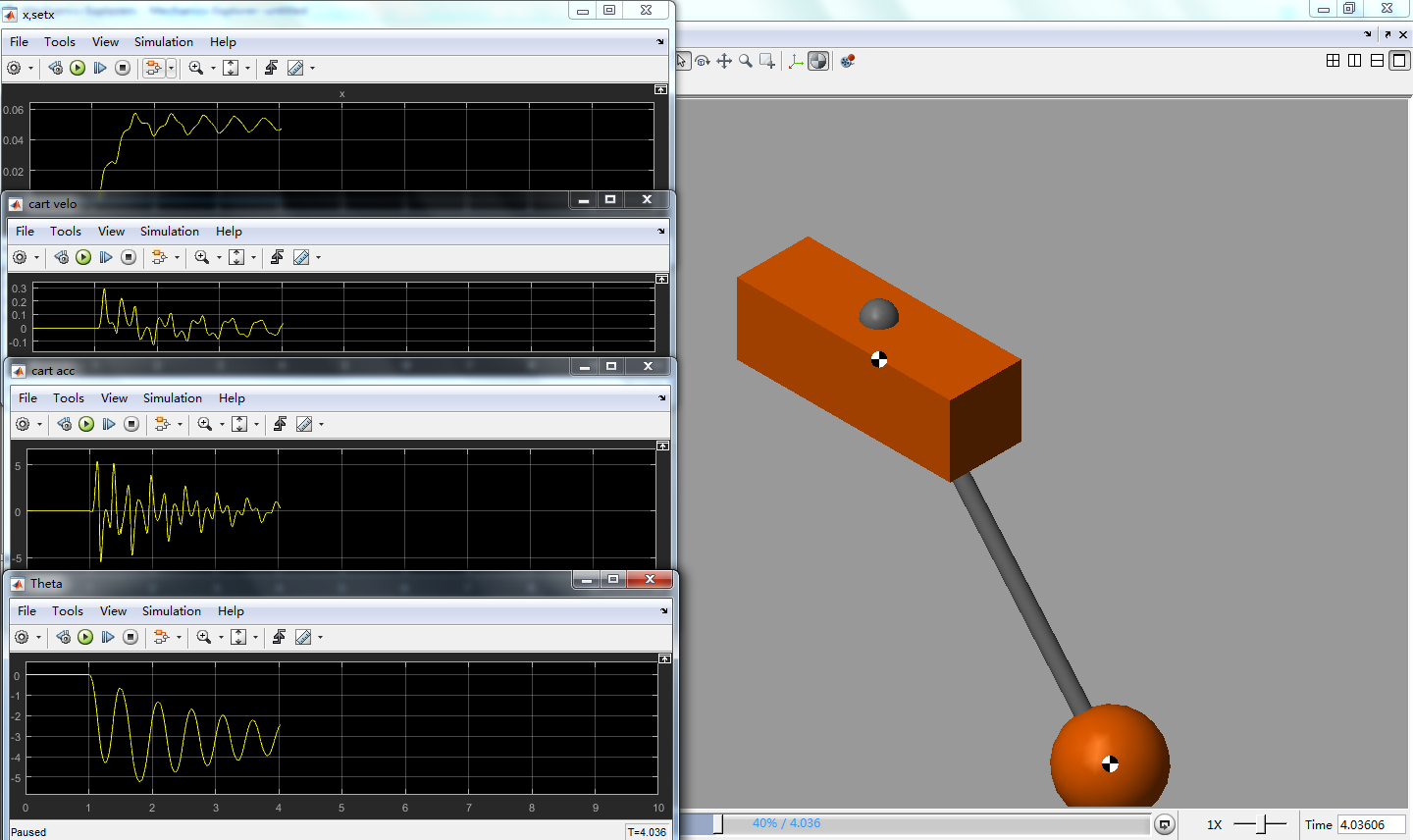
由图中可以得知,在1s时摆杆顶部球心处受到100N沿世界坐标系+x持续0.5S的推力,产生的各种运动参数曲线可以直接在示波器中看到,因为没有控制力的引入,摆杆会直接倒下。此时为了实现倒立摆的平衡,会在小车x方向添加一个控制力来保持平衡,接下来便是控制器的设计,倒立摆的控制算法有很多,从经典控制理论(传递函数),现代控制理论(状态空间),一直到智能控制理论。每一个理论都可以用来控制倒立摆,可见倒立摆的控制实验是学习控制理论的最有效平台。。。
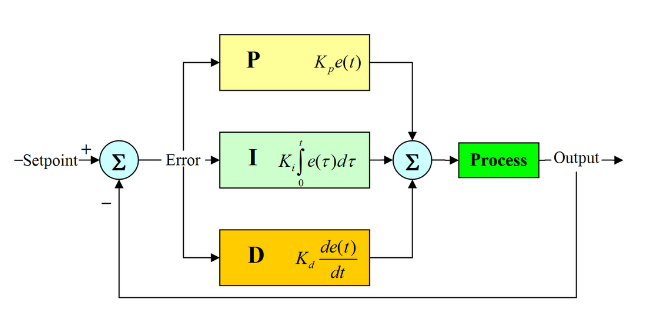
为了初步设计控制器输出控制力的信号,我了解了自控理论最经典的PID控制算法,得知其控制理念是直接采集被控变量进行对比然后处理输出(如下图),只是参数的整定比较繁琐,不过却可以进行初步的实验仿真,激发自己的学习兴趣。PID控制器参考https://www.cnblogs.com/shangdawei/p/4825259.html。文中说的很详细。里面有程序流程图教你写最简单的控制程序,笔者手头刚好有12xs128的MCU、普通有刷直流电机和光电编码器。根据流程,设计了电机的稳定转速控制器,不过难度依旧是参数的整定。好在MATLAB里关于PID的工具十分强大,里面的可视化工具包pidTuner,命令工具TuningGoal,systune等对于控制器的设计十分有帮助,最近一直在理解这几个函数指令,自己也从中受益颇深,尤其考验对自控原理的理解掌握。。。理解后PID算法后,就可以在simulink下开始控制倒立摆的平衡了,由于笔者整定参数还不太利索,经历多次尝试后,摆杆还是会倒下。。。。惭愧啊。
以下是运动规律:
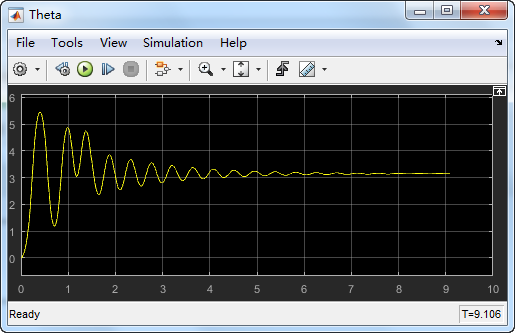
不过之后我发现MATLAB里面自带了一个demo模型,在MATLAB命令窗口键入 InvertedPendulumExample即可打开如下界面。可见,此模型的控制方法是PID Controller和传递函数控制器综合输出为控制力F(其实角度控制也能用PID调节,只要响应够快就能实现摆杆的平衡)。不过想要更好的控制倒立摆还是需要动力分析,将传递函数写出,进行根轨迹找出极点,确定好平衡位置。
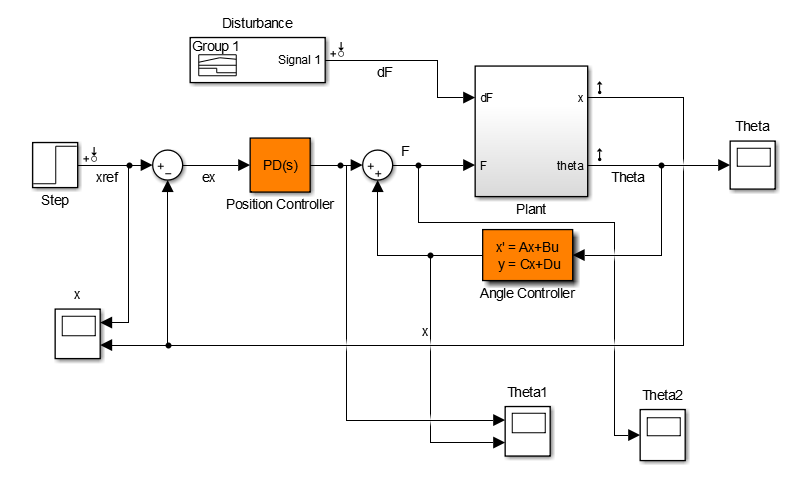
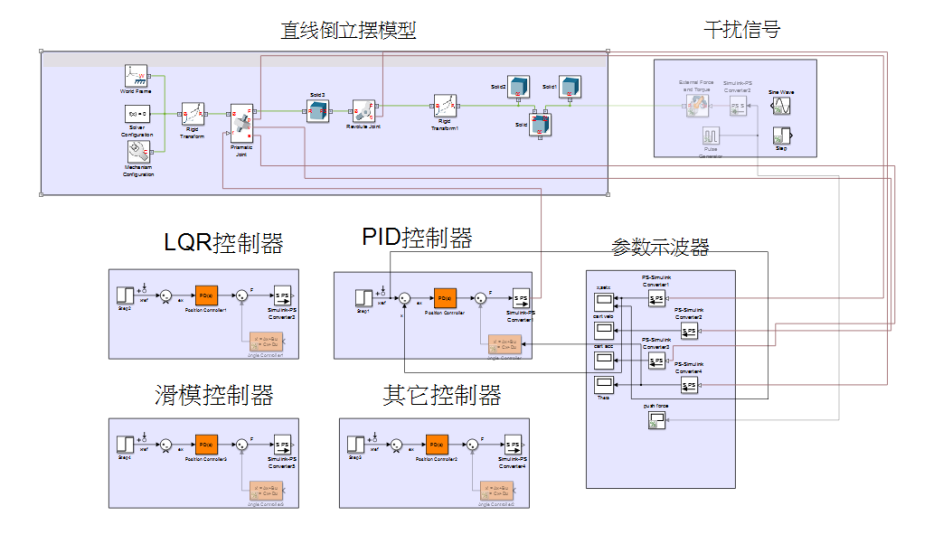
总之,Simulink对倒立摆的控制学习也提供了可视化的模拟。之后我打算以此模型为基础,添加不同控制器,学习基本控制理念。今后的大致框图将扩展成如下几个区域(当然可以整成一个subsystem):
(1)直线倒立摆模型
(2)干扰信号发生器
(3)参数采集显示器
(4)不同控制调节器
SimMechanics/Second Generation倒立摆模型建立及初步仿真学习的更多相关文章
- 基于MATLAB的单级倒立摆仿真
有关代码及word文档请关注公众号“浮光倾云”,后台回复A010.02即可获取 一.单级倒立摆概述 倒立摆是处于倒置不稳定状态,人为控制使其处于动态平衡的一种摆,是一类典型的快速.多变量.非线性.强耦 ...
- 三分钟快速上手TensorFlow 2.0 (上)——前置基础、模型建立与可视化
本文学习笔记参照来源:https://tf.wiki/zh/basic/basic.html 学习笔记类似提纲,具体细节参照上文链接 一些前置的基础 随机数 tf.random uniform(sha ...
- PID算法通俗理解,平衡车,倒立摆,适合不理解PID算法的人来看!
先插句广告,本人QQ522414928,不熟悉PID算法的可以一起交流学习,随时在线(PID资料再我的另一篇博客里) 倒立摆资料连接↓ https://www.cnblogs.com/LiuXinyu ...
- ArcGIS API for Silverlight 调用GP服务准备---GP模型建立、发布、测试
原文:ArcGIS API for Silverlight 调用GP服务准备---GP模型建立.发布.测试 第一篇.GP降雨量等值线建模.发布及测试 在水利.气象等行业中,要在WebGIS中实现空间分 ...
- PID算法 旋转倒立摆与平衡车的区别。此贴后边会更新。
我做PID算法的背景和经历:本人之前电子信息科学与技术专业,对控制方向颇感兴趣,刚上大学时听到实验室老师说PID算法,那年在暑假集训准备全国电子设计竞赛,我正在练习做一个以前专科的题目,帆板角度控制系 ...
- SiriShortCut模型建立及数据交互逻辑
1.模型数据需求 意图: 手机号 密码 网关ID 打开该情景的命令 情景号 情景名 情景背景图 添加该意图时的 token值 主程序登陆共享数据 手机号 token值 2.操作逻辑 1.意图被唤起 获 ...
- laravel模型建立和数据迁移和数据填充(数据填充没有成功)未完
开始创建我们的第一个 Article 模型及其对应迁移文件了,我们在项目根目录运行如下 Artisan 命令一步到位: php artisan make:model Article -m -m 是 - ...
- TensorFlow2 Part3:动态模型建立与训练
Keras是一个由Python编写的开源人工神经网络库,可以作为Tensorflow.Microsoft-CNTK和Theano的高阶应用程序接口,进行深度学习模型的设计.调试.评估.应用和可视化 [ ...
- 二分图带权匹配 KM算法与费用流模型建立
[二分图带权匹配与最佳匹配] 什么是二分图的带权匹配?二分图的带权匹配就是求出一个匹配集合,使得集合中边的权值之和最大或最小.而二分图的最佳匹配则一定为完备匹配,在此基础上,才要求匹配的边权值之和最大 ...
随机推荐
- asp.net动态添加控件学习
看了老师的教程后,自己一点感悟记录下来: 1.在页面提交后,动态生成的控件会丢失, 但如果生成控件的代码在pageload中,就可以,原理是每次生成页面都执行生成. 2.动态按件或页面原来控件, 在页 ...
- 桌面远程连接阿里云服务器(windows)后丧失了双向文件复制粘贴功能的解决方案(第一条博客!)
近日应公司要求,需在windows服务器上架设一个交易中介软件. 过程之一:将软件压缩文件传到服务器上. 问题:在“运行”对话框通过输入'mstsc' 创建远程连接以后,出现本地桌面与服务器之间无法物 ...
- Linux(CentOS7)设置开放端口
查看已经开放的端口:firewall-cmd --list-ports 开启端口: firewall-cmd --zone=public --add-port=端口号/tcp --permanent ...
- MyBatis学习日记(二): MyBatis Say Hello
首先在Eclipse中创建一个maven工程: 在maven工程下的pom.xml文件中添加MyBatis.MySQL.Junit依赖: <project xmlns="http:// ...
- linux 安装中文字体
工具/原料 centos6.5_x64 方法/步骤 centos6.5下使用下面命令进行安装 yum install -y fontconfig mkfontscale 使用fc-list ...
- 这可能是最简单的Page Object库
做过web自动化测试的同学,对Page object设计模式应该不陌生. Page object库应该根据以下目标开发: Page object应该易于使用 清晰的结构 PageObjects 对于页 ...
- BZOJ 1171: 大sz的游戏
ZJOI讲课的题目,数据结构什么的还是很友好的说 首先我们发现题目中提到的距离\(\le L\)的东西显然可以用单调队列维护 但是暴力搞去不掉区间并的限制,那么我们考虑从区间并入手 对于这种问题的套路 ...
- SpringCloud---熔断降级理解、Hystrix实战(五)
SpringCloud---熔断降级理解.Hystrix实战(五) https://www.cnblogs.com/qdhxhz/p/9581440.html https://blog.csdn.ne ...
- 关于Oracle使用管理员账号登录失败的问题
我在本地建的Oracle数据库在调试自己写的存储过程的时候提示缺少 debug connect session 权限,一般情况下根据这个提示直接用管理员账号登录进去,执行 grant debug co ...
- python_正则表达式随笔
webpage_regex = re.search(r'span_ed7[\s\S]*', dd) [\s\S]* 匹配多行,转义字符 webpage_regex = re.compile('< ...