DWM1000 多个标签定位讨论 --[蓝点无限]
多标签代码已经基本实现,完成代码可以在论坛上下载
http://bphero.com.cn/forum.php?mod=viewthread&tid=53&fromuid=2
蓝点DWM1000 模块已经打样测试完毕,有兴趣的可以申请购买了,更多信息参见 蓝点论坛
20181125 更新,按照下面的逻辑,已经完成代码,全部代码编译通过,需要后期测试。
1 单个标签定位模式
定位实现基于DWM1000 基础API 实验SS-TWR或者DS-TWR方法,非官方定位源码,官方定位源码使用的是大状态机。
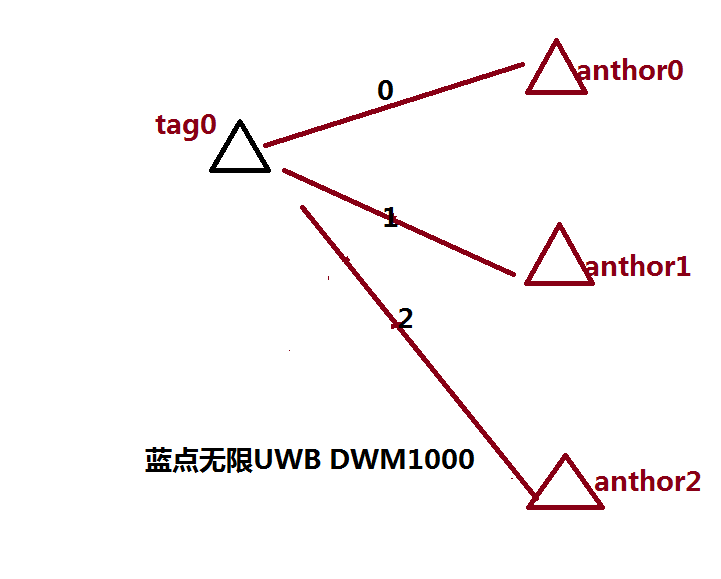
当单个标签定位基本流程是TAG 与ANTHOR0 基于SS/DS-TWR计算距离,然后依次再 ANTHOR1 ANTHOR2计算距离,分别步骤如下图的0 , 1 ,2 ,其中每一步都会有poll、response 以及finnal 多条信息。
而且,通过代码知道,tag 发送一定信息后,会进入等待状态,而anthor0 发送一条信息后也会进入等待状态,但是由于TAG分别与各个ANTHOR通信,所以中间的等待状态不会被破坏。
2 多个标签定位模式
下图是一个多标签定位简图,图中 有两个TAG,3个ANTHOR,其中每个TAG依然单独分别按照顺序与ANTHOR0/1/2 通信

但是会出现如下几种特殊情况需要处理:
1 TAG0 可能和 TAG1 同时给某一个ANCHOR发送信息,这个同时是相对广义的,因为通过代码发现,TAG和ANCHOR 之间测距需要一段时间,交换多条信息后才能实现,假如TAG0 和 ANTHOR已经建立连接,正在交换信息,若TAG1 也发送Poll 信息给ANTHOR0时,ANTHOR0 需要丢弃TAG1 的信息。
处理方法:当ANTHOR 接收到一条Poll信息后,更新目标TAG ID,若后面再接收到信息TAG ID与poll 信息TAG ID一致回复finnal 信息,否则认为冲突不做处理,若连续接收到两条poll 信息,更新目标TAG ID,以最后一次的TAG ID为准。
2 更为严重的是,TAG1 发送的任何信息TAG0都会收到,当然可以和上面一样比较TAG ID后可以丢弃,但是会导致TAG0 退出正常的测距循环(每次TAG 和 ANTHOR 进行测距,多条信息依次发送,当TAG发送一条信息后进入等待状态,若此时收到TAG1的信息,那TAG0就会退出与ANTHOR之间测距),这样的严重后果是,两个TAG相互发送数据,导致每个TAG均不能完成任何依次完成的测距。
处理办法:这个问题有一点类似“多核”问题,需要引入"锁"或者“信号量”的概念,ANTHOR 可以认为是资源。
1 程序初始化,TAG0默认获得"锁"或者“信号量”,与三个ANTHOR 发送信息,测试距离,当测距后。
2 TAG0 发送释放信号量信息,若网络中有其他TAG,收到该信息后,回复给TAG0(只有TAG可以回复该信息),且将TAG ID回复给TAG0,可以扩展其他信息。
3 TAG0 收到信号量请求信息后,发送“信号量”释放信息,“信号量”释放信息包含TAG ID以及其他扩展信息。
4 TAG收到信号量后,与系统中的三个ANTHOR进行数据交换,进行测距,测距完成后,发送释放“信号量”信息
5 TAG0 收到释放信号量信息,回收信号量,并回复给之前TAG
6 TAG0 根据网络状况,决定自己测距,还是继续释放信号量给其他TAG
其它问题:SS-TWR/DS-TWR 都会遇到问题,同一个区域内,如果有多个定位网络,则由于没有进行有效过滤,多个网络如果模式相同,数据相互影响(相同模式:包含射频频率 preamble 等设定相同)
后期需要引入PANID 以及 filter等,将不符合的信息直接在底层就过滤掉。
TAG 共享信号量代码参考
#ifdef TAG
/* Set expected response's delay and timeout. See NOTE 4 and 5 below.
* As this example only handles one incoming frame with always the same delay and timeout, those values can be set here once for all. */
dwt_setrxaftertxdelay(POLL_TX_TO_RESP_RX_DLY_UUS);
dwt_setrxtimeout(RESP_RX_TIMEOUT_UUS); OLED_ShowString(,,"DS TWR TAG:");
OLED_ShowString(,,"Distance:"); if(TAG_ID == MASTER_TAG)
{
Semaphore_Enable = ;
Waiting_TAG_Release_Semaphore = ;
}
else
{
Semaphore_Enable = ;
}
//Master TAG0
while()
{
if(Semaphore_Enable == )
{
//send message to anthor,TAG<->ANTHOR
//measure_distance(); add later
Semaphore_Enable = ;
if(TAG_ID != MASTER_TAG)
{
//send release semaphore to master tag
Semaphore_Release[ALL_MSG_SN_IDX] = frame_seq_nb;
Semaphore_Release[ALL_MSG_TAG_IDX] = TAG_ID;
dwt_writetxdata(sizeof(Semaphore_Release), Semaphore_Release, );
dwt_writetxfctrl(sizeof(Semaphore_Release), ); dwt_starttx(DWT_START_TX_IMMEDIATE );
while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS))
}
} if(TAG_ID == MASTER_TAG)//master tag
{
//statistics tag
if(sum(Semaphore[]) == )
{
for(TAG_INDEX = ; TAG_INDEX <MAX_TAG; TAG_INDEX++)
{
Tag_Statistics[ALL_MSG_SN_IDX] = frame_seq_nb;
Tag_Statistics[ALL_MSG_TAG_IDX] = TAG_INDEX;
dwt_writetxdata(sizeof(Tag_Statistics), Tag_Statistics, );
dwt_writetxfctrl(sizeof(Tag_Statistics), );
dwt_starttx(DWT_START_TX_IMMEDIATE | DWT_RESPONSE_EXPECTED); while (!((status_reg = dwt_read32bitreg(SYS_STATUS_ID)) & (SYS_STATUS_RXFCG | SYS_STATUS_ALL_RX_ERR)))
{ }; if (status_reg & SYS_STATUS_RXFCG)
{
/* Clear good RX frame event and TX frame sent in the DW1000 status register. */
dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_RXFCG | SYS_STATUS_TXFRS); /* A frame has been received, read it into the local buffer. */
frame_len = dwt_read32bitreg(RX_FINFO_ID) & RX_FINFO_RXFLEN_MASK;
if (frame_len <= RX_BUF_LEN)
{
dwt_readrxdata(rx_buffer, frame_len, );
} if (memcmp(rx_buffer, Tag_Statistics_response, ALL_MSG_COMMON_LEN) == )
{
Semaphore[Tag_Statistics_response[TAG_INX]] = ;
}
}
else{
/* Clear RX error events in the DW1000 status register. */
dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_ALL_RX_ERR);
}
}
}
//pick one tag ,send Semaphore message
//release to specific tag(TAG ID)
//master tag send release signal,and the specific tag send comfirm message
if(Waiting_TAG_Release_Semaphore == && sum(Semaphore[]) != )
{
for(TAG_INDEX = ; TAG_INDEX <MAX_TAG; TAG_INDEX++)
{
if(Semaphore[TAG_INDEX] == )
{
Master_Release_Semaphore[ALL_MSG_SN_IDX] = frame_seq_nb;
Master_Release_Semaphore[ALL_MSG_TAG_IDX] = TAG_INDEX;
dwt_writetxdata(sizeof(Master_Release_Semaphore), Master_Release_Semaphore, );
dwt_writetxfctrl(sizeof(Master_Release_Semaphore), );
dwt_starttx(DWT_START_TX_IMMEDIATE | DWT_RESPONSE_EXPECTED); while (!((status_reg = dwt_read32bitreg(SYS_STATUS_ID)) & (SYS_STATUS_RXFCG | SYS_STATUS_ALL_RX_ERR)))
{ }; if (status_reg & SYS_STATUS_RXFCG)
{
dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_RXFCG | SYS_STATUS_TXFRS); frame_len = dwt_read32bitreg(RX_FINFO_ID) & RX_FINFO_RXFLEN_MASK;
if (frame_len <= RX_BUF_LEN)
{
dwt_readrxdata(rx_buffer, frame_len, );
} if (memcmp(rx_buffer, Master_Release_Semaphore_comfirm, ALL_MSG_COMMON_LEN) == )
{
//if the tag recive a semaphore, wait release remaphore
Waiting_TAG_Relaease_Semphore = ;
}
}
else//the tag may leave net,clear semaphore
{
Semaphore[TAG_INDEX] = ;
Waiting_TAG_Relaease_Semphore = ;
/* Clear RX error events in the DW1000 status register. */
dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_ALL_RX_ERR);
}
break;//only release one semphore once
}
}
}
//Master tag waitting for specific tag send Semaphore Release
if( Waiting_TAG_Relaease_Semphore == )
{
dwt_setrxtimeout();
dwt_rxenable(); while (!((status_reg = dwt_read32bitreg(SYS_STATUS_ID)) & (SYS_STATUS_RXFCG | SYS_STATUS_ALL_RX_ERR)))
{ }; if (status_reg & SYS_STATUS_RXFCG)
{
static uint32 frame_len; dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_RXFCG);
frame_len = dwt_read32bitreg(RX_FINFO_ID) & RX_FINFO_RXFL_MASK_1023;
if (frame_len <= RX_BUFFER_LEN)
{
dwt_readrxdata(rx_buffer, frame_len, );
}
if (memcmp(rx_buffer, Semaphore_Release, ALL_MSG_COMMON_LEN) == )
{
Semaphore[Semaphore_Release[ALL_MSG_TAG_IDX]] = ;
Waiting_TAG_Relaease_Semphore = ;
}
}
else{
/* Clear RX error events in the DW1000 status register. */
dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_ALL_RX_ERR);
}
}
//if all tag have serviced by master tag
//master tag can measure the distance
if(sum(Semaphore[]) == )
{
Semaphore_Enable = ;
}
}
else //specific tag
{
dwt_setrxtimeout();
dwt_rxenable(); /* Poll for reception of a frame or error/timeout. See NOTE 7 below. */
while (!((status_reg = dwt_read32bitreg(SYS_STATUS_ID)) & (SYS_STATUS_RXFCG | SYS_STATUS_ALL_RX_ERR)))
{ }; if (status_reg & SYS_STATUS_RXFCG)
{
static uint32 frame_len;
/* Clear good RX frame event in the DW1000 status register. */
dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_RXFCG); /* A frame has been received, read it into the local buffer. */
frame_len = dwt_read32bitreg(RX_FINFO_ID) & RX_FINFO_RXFL_MASK_1023;
if (frame_len <= RX_BUFFER_LEN)
{
dwt_readrxdata(rx_buffer, frame_len, );
} if (memcmp(rx_buffer, Tag_Statistics, ALL_MSG_COMMON_LEN) == )
{
Tag_Statistics_response[ALL_MSG_SN_IDX] = frame_seq_nb;
Tag_Statistics_response[ALL_MSG_TAG_IDX] = TAG_ID;
dwt_writetxdata(sizeof(Tag_Statistics_response), Tag_Statistics_response, );
dwt_writetxfctrl(sizeof(Tag_Statistics_response), ); dwt_starttx(DWT_START_TX_IMMEDIATE );
while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS))
{ };
} if (memcmp(rx_buffer, Master_Release_Semaphore, ALL_MSG_COMMON_LEN) == )
{
Master_Release_Semaphore_comfirm[ALL_MSG_SN_IDX] = frame_seq_nb;
Master_Release_Semaphore_comfirm[ALL_MSG_TAG_IDX] = TAG_ID;
dwt_writetxdata(sizeof(Master_Release_Semaphore_comfirm), Master_Release_Semaphore_comfirm, );
dwt_writetxfctrl(sizeof(Master_Release_Semaphore_comfirm), ); dwt_starttx(DWT_START_TX_IMMEDIATE );
while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS))
{ };
} }
else
{
/* Clear RX error events in the DW1000 status register. */
dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_ALL_RX_ERR);
}
}
DWM1000 多个标签定位讨论 --[蓝点无限]的更多相关文章
- DWM1000 多个基站定位讨论 --[蓝点无限]
该篇是之前<DWM1000 多个标签定位讨论 --[蓝点无限]>的续篇 多基站定位也是定位必然,因为有些稍微大一点的场合,或者多个区域(厂区不同房间)定位,往往4个基站会严重不足. DWM ...
- DWM1000 定位操作流程--[蓝点无限]
蓝点DWM1000 模块已经打样测试完毕,有兴趣的可以申请购买了,更多信息参见 蓝点论坛 1烧录HEX文件 使用ST-LINK utility 烧录HEX文件,分别烧录三个基站以及一个标签,烧录基站时 ...
- Python自动化之下拉框,隐藏标签定位 代码&报错解决
python自动化:下拉框定位方法之select标签 style="display: none;" 报错 selenium.common.exceptions.ElementNo ...
- Highmaps网页图表教程之绘图区显示标签显示数据标签定位
Highmaps网页图表教程之绘图区显示标签显示数据标签定位 Highmaps数据标签定位 由于数据标签是和节点一一对应,所以数据标签是依据节点位置进行定位的.本节详细讲解如何对数据标签进行定位. H ...
- DWM1000 三基站一标签定位HEX
蓝点DWM1000 模块已经打样测试完毕,有兴趣的可以申请购买了,更多信息参见 蓝点论坛 HEX 下载链接参见论坛:http://bphero.com.cn/forum.php?mod=viewthr ...
- DWM1000 蓝点无限 PCB样板
蓝点DWM1000 模块已经打样测试完毕,有兴趣的可以申请购买了,更多信息参见 蓝点论坛 正文: 虽然经过一段很长时间的停滞,最近调试成功,可以实现精准测距 和定位. 部分模块正在陆续整理,准备出售一 ...
- 【DWM1000】 非官方开源定位代码bitcraze
蓝点DWM1000 模块已经打样测试完毕,有兴趣的可以申请购买了,更多信息参见 蓝点论坛 正文: 最近关注DWM1000 定位,一方面在看DWM1000 官方提供的代码,也在四处网上找资料看资料. 其 ...
- UWB DWM1000 智能跟踪小车 --[蓝点无限]
蓝点DWM1000 模块已经打样测试完毕,有兴趣的可以申请购买了,更多信息参见 蓝点论坛 UWB 智能跟踪小车:一共三个UWB模块,手持一个,小车上两个. 通过测量小车上两个模块与手持模块之间的距离, ...
- DWM1000 测距原理简单分析 之 SS-TWR代码分析2 -- [蓝点无限]
蓝点DWM1000 模块已经打样测试完毕,有兴趣的可以申请购买了,更多信息参见 蓝点论坛 正文: 首先将SS 原理介绍中的图片拿过来,将图片印在脑海里. 对于DeviceA 和 DeviceB来说,初 ...
随机推荐
- busybox编译
sync.c:(.text.sync_main+0x7c): undefined reference to `syncfs'Coreutils—>sync选项去掉 nsenter.c:(.tex ...
- Token防止表单重复提交和CSRF攻击
Token,可以翻译成标记!最大的特点就是随机性,不可预测,一般黑客或软件无法猜测出来. Token一般用在两个地方: 1: 防止表单重复提交 2: anti csrf攻击(Cross-site re ...
- velocity 新手用小常识--开源,简单易上手
项目中经常用到的 .vm 后缀文件是什么? 基于 java 的 velocity 模版引擎的一种页面控制文件,是一些类似 html 语句和一种叫 VLT 的语句构成 velocity --美 [v ...
- jQuery AJAX 方法 success()后台传来的4种数据
JAVA中的四种JSON解析方式详解 jQuery AJAX 方法 success()后台传来的4种数据 1.后台返回一个页面 js代码 /**(1)用$("#content-wrapper ...
- 原生js封装cookie获取、设置及删除
使用cookie(key,value,options) 参数key,value,options(可选) function cookie(key,value,options){ if(typeof va ...
- Choreographer解析
Choreographer_舞蹈编导 为什么叫舞蹈编导,因为舞蹈是由节奏的,节奏是每个点位动作的快慢控制,跳舞时节奏很重要,编舞者控制节奏.视图刷新也是如此,不是说你想刷就能刷,一切要按照底层信号要求 ...
- Spring Cloud 2-Eureka服务发现注册(一)
Spring Cloud Eureka 1.服务端配置 pom.xml application.yml Application.java 2.客户端配置 pom.xml application.ym ...
- 【原创】大叔问题定位分享(24)hbase standalone方式启动报错
hbase 2.0.2 hbase standalone方式启动报错: 2019-01-17 15:49:08,730 ERROR [Thread-24] master.HMaster: Failed ...
- Flask开发微电影网站(七)
1.后台管理之电影管理 1.1 定义电影表单 在app的admin目录的forms.py文件中,定义电影表单 # 电影表单 class MovieForm(FlaskForm): title = St ...
- centos7中设置nginx的systemctl启动方式
1.建立服务文件 (1)文件路径 vim /usr/lib/systemd/system/nginx.service (2)服务文件内容 [Unit] Description=nginx - high ...