ROS学习笔记6-理解主题
本文来源于:http://wiki.ros.org/ROS/Tutorials/UnderstandingTopics
- ROS主题
假设turtlesim节点已经运行,打开一个新终端,使用如下命令运行键盘控制节点$ rosrun turtlesim turtle_teleop_key
则终端会弹出来如下窗口:
表示从键盘读取输入来控制小海龟移动。
将焦点选中到该窗口,即可使用键盘上的方向键来移动小 海龟。
下来我们来分析一下在这背后,发生了什么。
- 理解ROS主题(Topic)
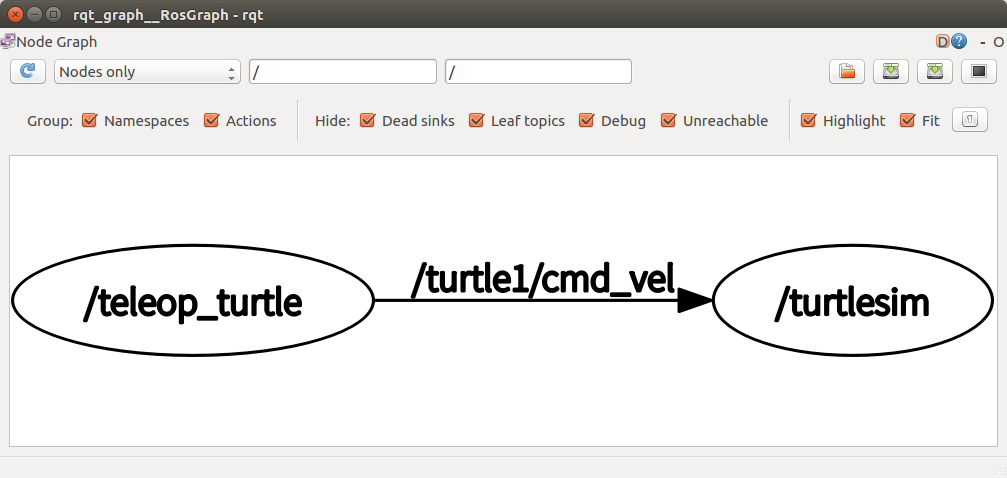
上面有两个节点:turtlesim和turtle_teleop_key,他们通过ROS主题来进行通信。其中,turtle_teleop_key将键盘点击信息发布到消息中,turtlesim节点通过订阅该主题来接收键盘点击信息。- 使用rqt_graph
ROS提供了可视化工具,rqt_graph来查看ROS系统中运行了什么东西。该工具属于rqt_graph包,我们可以通过如下命令安装该包。$ sudo apt-get install ros-<distro>-rqt
$ sudo apt-get install ros-<distro>-rqt-common-plugins其中,distro为ROS发行版本,本教程中使用kinetic版本。
然后在新终端中运行:$ rosrun rqt_graph rqt_graph
则会出现如下界面:
如果将鼠标放在/turtle1/cmd_vel上,则界面中两个椭圆会颜色会发生如下变化:
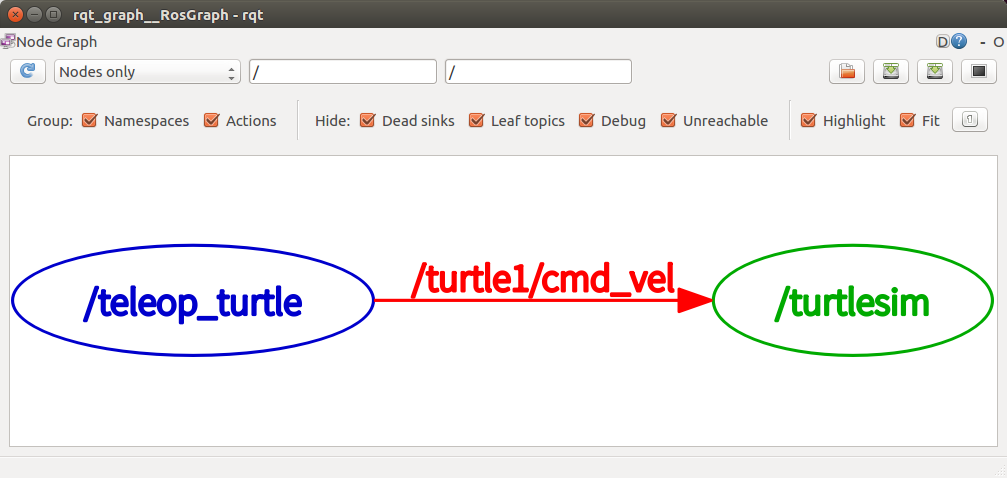
其中,变为红色的主题(Topics),蓝色和绿色的为节点(Nodes),其中蓝色为该主题的发布节点,绿色为该主题的订阅节点。
- rostopic
ROS提供了rostopic命令来查看主题相关的信息。
rostopic有一些子命令,可以使用rostopic -h查看,如下所示: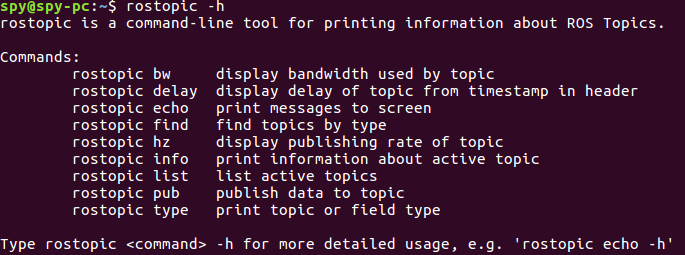
rostopic echo
其中,rostopic echo命令可以打印主题消息。语法如下:rostopic echo [topic]
例如我们之前用rqt_graph查看到一个主题:/turtle1/cmd_vel,我们可以用如下命令来查看该中主题中的消息:
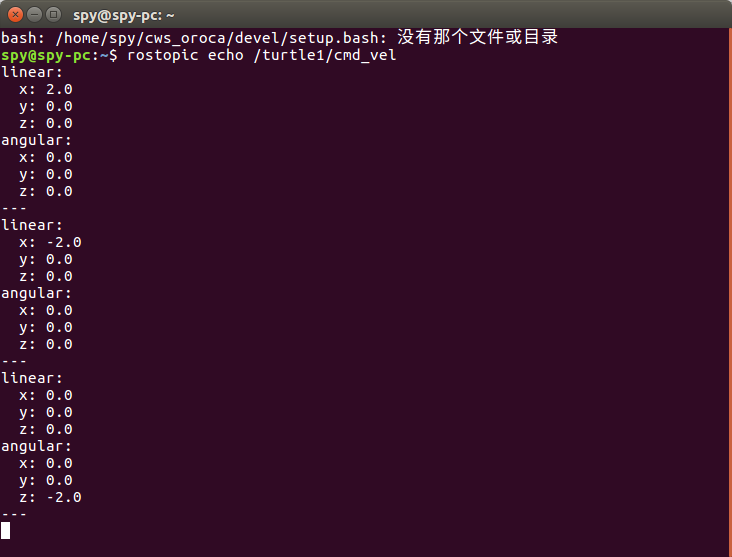
如上图所示,运行了
rostopic echo /turtle1/cmd_vel
之后,将焦点中选中到键盘节点的窗口,点击方向键,则可以打印出该主题的消息内容。
现在如果再运行rqt_graph,则显示如下:
可以看出来多了一个节点来订阅/turtle1/cmd_vel主题,该节点即为rostopic echo节点。
- rostopic list
rostopic list命令可以列出当前订阅或发布的主题,用法如下: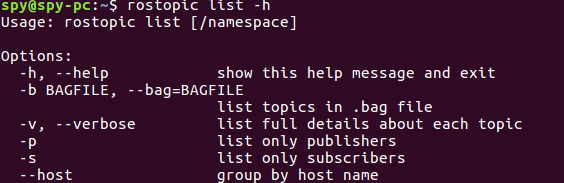
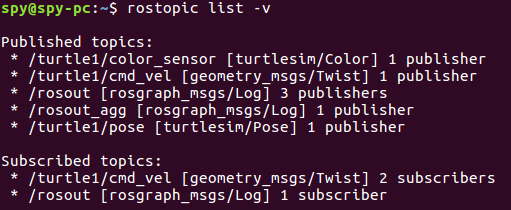
若使用-v选项,则会列出来当前订阅和发布主题的完整信息。
- rostopic type
节点之前通过订阅和发布主题来进行通信,而发送和接收的数据需要是同一类型的消息,通信的内容形式即为消息(Message)。
这些消息的类型可以通过rostopic type命令查看,该命令用法为:rostopic type [topic]
例如,我们可以查看/turtle1/cmd_vel中的消息类型:

该主题的消息类型为:geometry_msgs/Twist。
可以使用如下命令查看该消息类型的数据成员:spy@spy-pc:~$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z可以看出来该消息类型包含两个向量Vector3类型的结构体,分别表示速度和角速度。
- rostopic pub
rostopic pub命令可以直接发布ros主题的消息。该命令用法如下:rostopic pub [topic] [msg_type] [args]
例如:
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
该命令表示发布类型为geometry_msgs/Twist的消息到/turtle1/cmd_vel主题,该消息参数为:'[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'表示速度为向前2.0,角速度为1.8,-1表示只发布一次消息。
这组参数使用的是YAML语法,关于该语法的更多信息请参考YAML command line documentation.两个短杠--表示,后面的均是参数,不是选项,以防止解析器解析错误,例如含有符号的参数,如不加区分,解析器可能会按照选项来解析。
在该命令下,小乌龟移动界面如下图所示: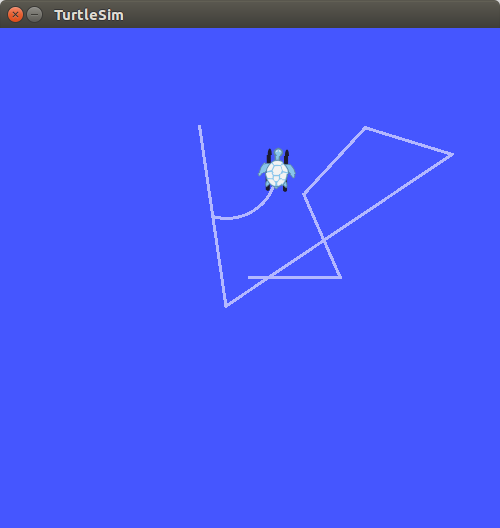
可以看出,小乌龟大约 移动了1/4段圆弧。
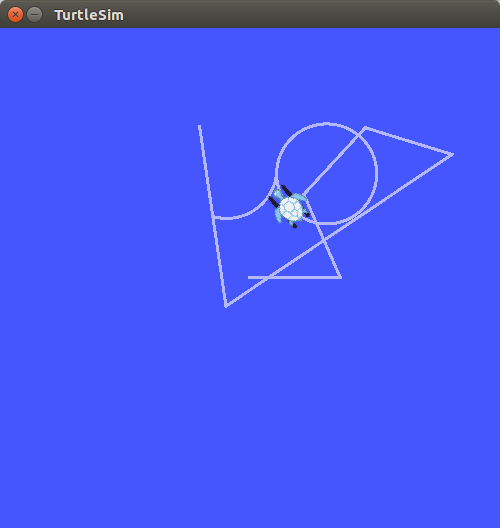
为了使小乌龟持续移动,我们需要持续发布该消息,需要加入持续发布消息的频率参数,该参数可以使用-r选项指定,例如使用如下语句:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
就可以让乌龟持续转圈:
再使用rqt_graph查看主题:
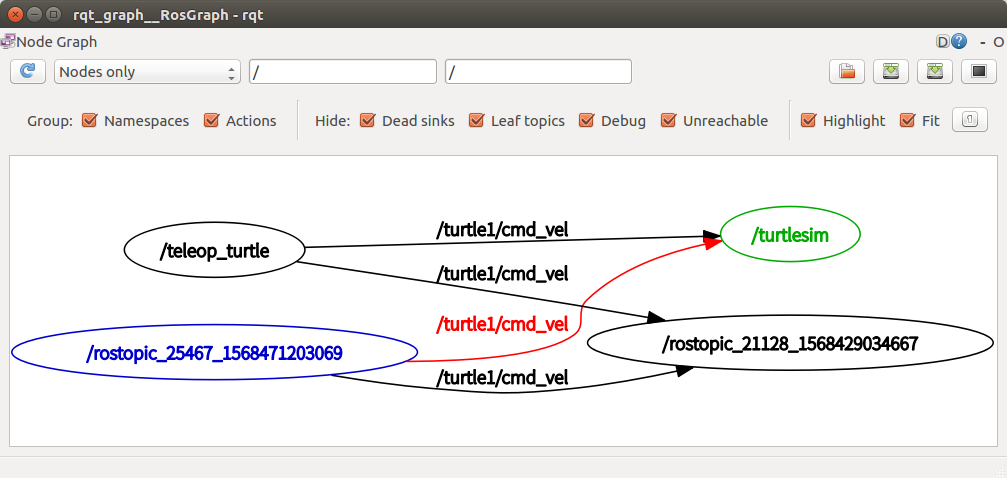
可以看出来多了一个节点来发布/turtle1/cmd_vel主题到/turtlesim节点的。
- 消息数据的可视化
- rostopic hz
rostopic hz命令可以查看一个主题的发布频率,例如:rostopic hz /turtle1/pose
subscribed to [/turtle1/pose]
average rate: 62.485
min: 0.004s max: 0.028s std dev: 0.00250s window: 63
average rate: 62.495
min: 0.004s max: 0.028s std dev: 0.00180s window: 125
average rate: 62.489
min: 0.004s max: 0.028s std dev: 0.00149s window: 188
average rate: 62.495
min: 0.002s max: 0.029s std dev: 0.00181s window: 250
average rate: 62.500
min: 0.002s max: 0.029s std dev: 0.00175s window: 313
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00190s window: 375
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00176s window: 438
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00166s window: 501
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00165s window: 563
average rate: 62.502
min: 0.002s max: 0.029s std dev: 0.00175s window: 626
average rate: 62.498
min: 0.002s max: 0.029s std dev: 0.00178s window: 688
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00171s window: 751
average rate: 62.498
min: 0.002s max: 0.029s std dev: 0.00165s window: 813
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00159s window: 876
average rate: 62.500
min: 0.002s max: 0.029s std dev: 0.00158s window: 938
average rate: 62.499
min: 0.002s max: 0.029s std dev: 0.00153s window: 1001
average rate: 62.499
min: 0.002s max: 0.029s std dev: 0.00149s window: 1064
average rate: 62.500
min: 0.002s max: 0.029s std dev: 0.00147s window: 1126
average rate: 62.499
min: 0.001s max: 0.032s std dev: 0.00161s window: 1189
average rate: 62.499
min: 0.001s max: 0.032s std dev: 0.00162s window: 1251
average rate: 62.499
min: 0.001s max: 0.032s std dev: 0.00159s window: 1314
average rate: 62.501
min: 0.001s max: 0.032s std dev: 0.00155s window: 1376
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00152s window: 1439
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00149s window: 1501
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00147s window: 1564
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00145s window: 1627
average rate: 62.499
min: 0.001s max: 0.032s std dev: 0.00142s window: 1689
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00140s window: 1752
average rate: 62.444
min: 0.001s max: 0.041s std dev: 0.00155s window: 1813可以看出,turtlesim节点发布的/turtle1/pose主题频率约为62Hz,并且给出了统计特性,最大值,最小值和方差。
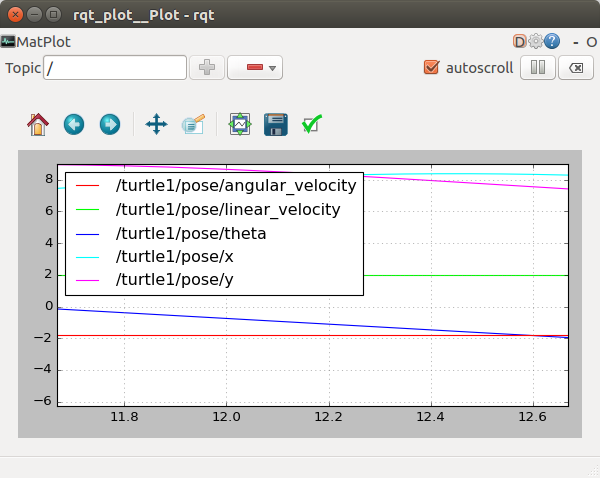
- rqt_plot
该命令会把消息数据绘图:rosrun rqt_plot rqt_plot
会弹出rqt_plot的界面,然后在界面中Topic后面的文本框中输入主题名,例如输入:/turtle1/pose然后就会显示/turtle1/pose主题中的消息数据曲线。
- rostopic hz
- 使用rqt_graph
ROS学习笔记6-理解主题的更多相关文章
- 微信小程序开发:学习笔记[7]——理解小程序的宿主环境
微信小程序开发:学习笔记[7]——理解小程序的宿主环境 渲染层与逻辑层 小程序的运行环境分成渲染层和逻辑层. 程序构造器
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- ROS学习笔记1-引言
该学习笔记参考ROS官方wiki的内容,见:http://wiki.ros.org/ROS/Introduction 什么是ROSROS的全称是Robot Operating System,即机器人操 ...
- ROS学习笔记八:基于Qt搭建ROS开发环境
1 前言 本文介绍一种Qt下进行ROS开发的完美方案,使用的是ros-industrial的Levi-Armstrong在2015年12月开发的一个Qt插件ros_qtc_plugin,这个插件使得Q ...
- Java_JVM学习笔记(深入理解Java虚拟机)___重点
http://chenzhou123520.iteye.com/category/196061 转载 JVM学习笔记(一):运行时数据区 JVM学习笔记(二):JVM中对象访问的两种方式 JVM学习笔 ...
- ROS学习笔记三(理解ROS节点)
要求已经在Linux系统中安装一个学习用的ros软件包例子: sudo apt-get install ros-indigo-ros-tutorials ROS图形概念概述 nodes:节点,一个节点 ...
- ROS学习笔记2-基本概念
本笔记来源于:http://wiki.ros.org/ROS/Concepts ROS文件系统级别文件系统级别主要包含了你能在ROS的磁盘上遇到的资源,包括: 包(Packages):包是ROS中资源 ...
- ROS学习手记 - 5 理解ROS中的基本概念_Services and Parameters
上一节完成了对nodes, Topic的理解,再深入一步: Services and Parameters 我不理解为何 ROS wiki 要把service与parameter放在一起介绍, 很想分 ...
- 学习笔记5——wp主题开发
我觉得学习wordpress插件开发之前还是得先理解一下wp的主题开发,循序渐进才能学好wordpress开发,话不多说,接下来整理一下这两天学习的wordpress主题开发的一些心得和体会,与大家一 ...
随机推荐
- 区块链学习——HyperLedger-Fabric v1.0 启动过程分析
本章我们从fabric v1.0的e2e_cli示例开始分析整个启动过程以及在过程中的一些配置文件 首先呢,还是确保你的基本环境已经搭建完成,v1.0源码和镜像也都下载完毕 fabric启动过程中的相 ...
- JavaScirpt - 模块的写法
传送门 http://www.ruanyifeng.com/blog/2012/10/javascript_module.html 1. 原始写法 function f1() { // do sth. ...
- 序列变换 HDU - 5256
序列变换 HDU - 5256 题目链接 题目 我们有一个数列A1,A2...An,你现在要求修改数量最少的元素,使得这个数列严格递增.其中无论是修改前还是修改后,每个元素都必须是整数. 请输出最少需 ...
- Python os模块、os.path模块常用方法
os模块:os模块在python中包含普遍的操作系统功能,下面列出了一些在os模块中比较有用的部分. os.sep 可以取代操作系统特定的路径分隔符.windows下为 "\" o ...
- 【代码学习】PYTHON字典(Dictionary)
一.什么是字典 字典是另一种可变容器模型,且可存储任意类型对象. 字典的每个键值(key->value)对用(:)分割,每个对之间用逗号(,)分割,整个字典包括在花括号({})中,格式如下 d ...
- 【代码总结】GD库中简单的验证码
大体思路: 代码部分: <?php //1.创建画布 $img = imagecreatetruecolor(100,30); //2.设置颜色 值越小,颜色越深 $color1 = image ...
- Vue 项目中使用less
首先 你得有 完整的 Vue开发环境第一步 安装less 依赖 npm install less less-loader --save 第二步 修改webpack.config.js文件,配置load ...
- POJ3268 Silver Cow Party (建反图跑两遍Dij)
One cow from each of N farms (1 ≤ N ≤ 1000) conveniently numbered 1..N is going to attend the big co ...
- Trie图(AC自动机)总结
AC自动机构建完成后,某个节点沿着Fail链向上能从长到短走到自己的所有后缀.一般的,遍历主串进行匹配,就是在Trie图上定向移动的过程. 构造(一遍 BFS) void build_AC() { ; ...
- 「JSOI2014」矩形并
「JSOI2014」矩形并 传送门 我们首先考虑怎么算这个期望比较好. 我们不难发现每一个矩形要和 \(n - 1\) 个矩形去交,而总共又有 \(n\) 个矩形,所以我们把矩形两两之间的交全部加起来 ...