ubuntu16.04下用笔记本摄像头和ROS编译运行ORB_SLAM2的单目AR例程
要编译ORB_SLAM2的ROS例程首先需要安装ROS,以及在ROS下安装usb_cam驱动并调用,最后搭建ORB_SLAM2。
1.ROS的安装
我的电脑安装的是ubuntu16.04系统,所以我安装的是2016年的发行版本ROS_Kinetic,一般的话ROS的版本是一年一更新,和ubuntu的系统更新保持同步。如果你的系统是ubuntu14.04,你可以安装2014年的发行版本ROS_Indigo。
ROS_Kinetic在ubuntu16.04上的安装可以参考我的博客:点击链接地址
2.usb_cam在ROS中的编译
首先要新建一个ROS的工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
编译工作空间
cd ~/catkin_ws/
catkin_make
设置环境变量
source devel/setup.bash
如果你的终端为zsh,请用如下命令
source devel/setup.zsh
进入到catkin_ws/src目录下,下载usb_cam的源文件到此目录下
cd ~/catkin_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
退出到catkin_ws目录下执行catkin_make命令进行编译并设置环境
cd ..
catkin_make
source ~/catkin-ws/devel/setup.bash
可以测试是否配置成功
roscd usb_cam
没报错就说明安装成功了
3.编译ORB_SLAM2库
最简单的根据orb_slam2在github上面的项目地址就可以安装成功
项目地址:https://github.com/raulmur/ORB_SLAM2
详细的可以参考我的博文:点击链接地址
4.编译ROS例程
网上编译ROS例程的教程很多,但我还是觉得github上面提供的最方便
首先进入到你的ORB_SLAM2源代码目录下,然后执行命令
chmod +x build_ros.sh
./build_ros.sh
这个可能不会100%编译成功,但Mono和MonoAR可以编译成功,主要是ros_rgbd不能编译成功,出现报错,我就没管他。
编译完之后,记得在.bashrc后面加入:
source /home/zn/ORB_SLAM2-master/Examples/ROS/ORB_SLAM2/build/devel/setup.bash
5. 运行ROS中的Demo
以上步骤都成功后,我们就可以运行ros中的demo了
开始之前还有个地方需要改:
把ros_mono_ar.cc中的
ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1, &ImageGrabber::GrabImage,&igb);
改为:
ros::Subscriber sub = nodeHandler.subscribe("/usb_cam/image_raw", 1, &ImageGrabber::GrabImage,&igb);
(看到没有,路径变了哟。因为我们的图片都是从/usb_cam/image_raw发送过来的)
然后再把Example编译一下~
这下可以开始了:
首先我们要启动ros内核,新开一个终端,执行
roscore
启动usb_cam摄像头节点,新开一个终端,执行
roslaunch usb_cam usb_cam.launch
启动 ORB_SLAM2 的 Mono 节点(单目)
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
PATH_TO_VOCABULARY是ORBvoc.txt文件路径,PATH_TO_SETTINGS_FILE是你的摄像机内参数文件路径
所以可以在第三个终端输入如下命令:
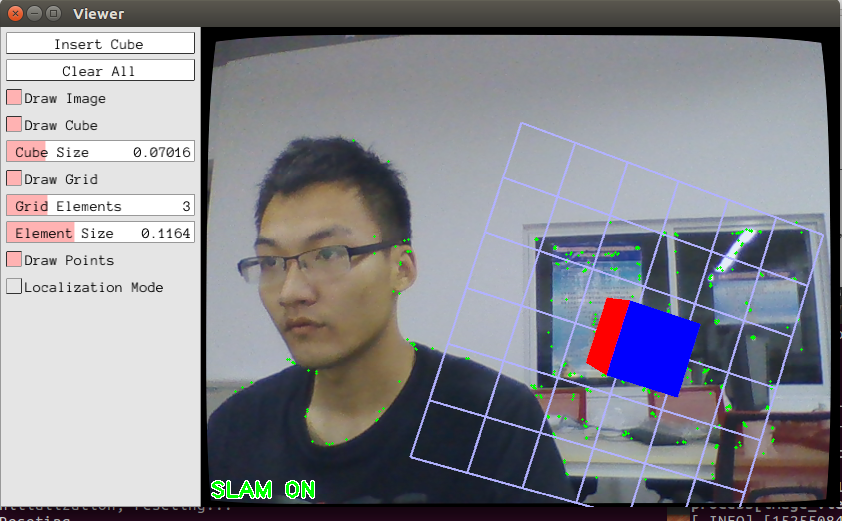
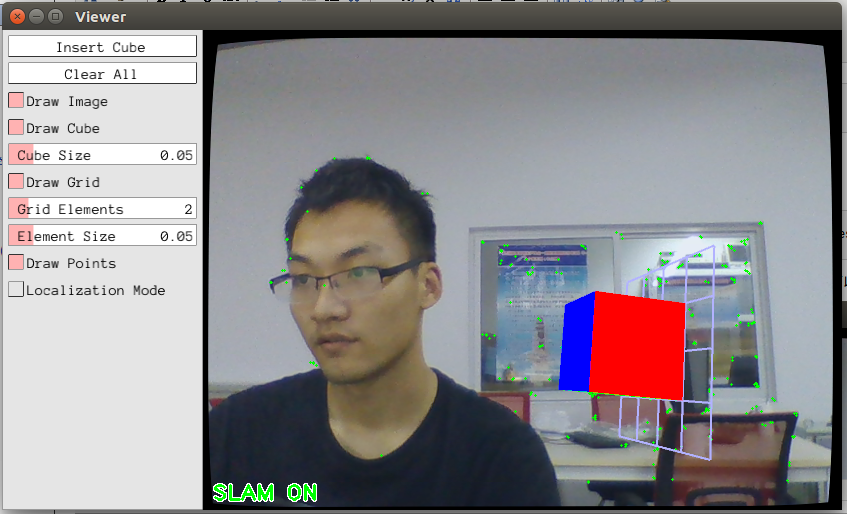
rosrun ORB_SLAM2 MonoAR /home/zn/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/zn/ORB_SLAM2/Examples/Monocular/TUM1.yaml
路径按照自己的电脑路径进行更改,TUM1.yaml是参数设置文件,主要是相机的内参,这个得自己标定。如果懒得标定,可以直接用TUM1.yaml,不影响程序的运行。
end......
参考博文:https://blog.csdn.net/u79501/article/details/68942174
http://www.liuxiao.org/2016/07/ubuntu-orb-slam2-%E5%9C%A8-ros-%E4%B8%8A%E7%BC%96%E8%AF%91%E8%B0%83%E8%AF%95/
ubuntu16.04下用笔记本摄像头和ROS编译运行ORB_SLAM2的单目AR例程的更多相关文章
- 沈逸老师ubuntu速学笔记(2)-- ubuntu16.04下 apache2.4和php7结合编译安装,并安裝PDOmysql扩展
1.编译安装apache2.4.20 第一步: ./configure --prefix=/usr/local/httpd --enable-so 第二步: make 第三步: sudo make i ...
- ubuntu16.04下笔记本自带摄像头编译运行PTAM
ubuntu16.04下笔记本自带摄像头编译运行PTAM 转载请注明链接:https://i.cnblogs.com/EditPosts.aspx?postid=9014147 个人邮箱:feifan ...
- Linux:Ubuntu16.04下创建Wifi热点
Linux:Ubuntu16.04下创建Wifi热点 说明: 1.Ubuntu16.04里面可以直接创建热点,而不用像以前的版本,还要其他辅助工具. 2.本篇文章转载自编程人生 具体步骤如下: 1. ...
- Ubuntu16.04下部署 nginx+uwsgi+django1.9.7(虚拟环境pyenv+virtualenv)
由于用的新版本系统,和旧的稍有差别,在网上搜了很多相关资料,搞了三天终于搞好在Ubuntu16.04下的部署,接下来就详细写写步骤以及其中遇到的问题.前提是安装有虚拟环境pyenv+virtualen ...
- Ubuntu16.04下安装数据库oracle客户端
在Ubuntu16.04下安装oracle数据库客户端,使Django项目连接到远程Oracle数据库. 1.下载oracle客户端安装包: 进入官网http://www.oracle.com/tec ...
- 【原创】Octovis在Ubuntu16.04下运行出现core dump的解决方案
本人SLAM研究新手,使用系统为Ubuntu16.04.本文原址:http://www.cnblogs.com/hitlrk/p/6667253.html 在学习SLAM的过程中,使用Octomap进 ...
- Ubuntu16.04下安装redis
Ubuntu16.04下安装redis 保证网络畅通,选定好下载工作路径,执行以下命令下载redis-3.2.6: sudo wget http://download.redis.io/release ...
- Ubuntu16.04下Office替代品Office Online
Ubuntu16.04下Office替代品 Ubuntu16.04下的office Libreoffice 这个是Ubuntu自带的Office,总是存在各种问题,如果用来阅读还是不错的,但是编辑就不 ...
- Linux入门(13)——Ubuntu16.04下将图片和pdf互转
Ubuntu16.04下将图片和pdf互转 将图片转为PDF: convert 图片 PDF convert pic.jpg pic.pdf 将PDF转为图片: convert PDF 图片 conv ...
随机推荐
- native生成策略:由Hibernate根据所使用的数据库支持能力从identity、sequence或者等生成策略中选择一种
increment生成策略:当Hibernate准备在数据库表中插入一条新记录时,首先从数据库表中获取当前主键字段的最大值,然后在最大值基础上加1,作为当前持久化对象的标识符属性值.这种策略即incr ...
- Unity文件操作路径
Unity3D中的资源路径: Application.dataPath:此属性用于返回程序的数据文件所在文件夹的路径.例如在Editor中就是Assets了. Application.streamin ...
- mysql中什么是物理备份?
需求描述: 今天在看数据库备份,恢复的内容,就是对于一个概念,物理备份的理解,在这里记录下. 概念解释: 物理备份:就是对存储数据库内容的目录和文件的直接拷贝.简单来说,就是对物理文件的拷贝. 文档创 ...
- centos7 安装zookeeper 集群
data 创建myid 设置1 zookeeper默认端口2181 同步端口 20881 和 30881 设置zoo.cfg文件
- makefile--嵌套执行(四)
原创博文,转载请标明出处--周学伟http://www.cnblogs.com/zxouxuewei/ 在大一些的项目里面,所有源代码不会只放在同一个目录,一般各个功能模块的源代码都是分开的,各自放在 ...
- 7 -- Spring的基本用法 -- 3... Spring 的核心机制 : 依赖注入
7.3 Spring 的核心机制 : 依赖注入 Spring 框架的核心功能有两个. Spring容器作为超级大工厂,负责创建.管理所有的Java对象,这些Java对象被称为Bean. Spring容 ...
- laravel 强大的关联模型
内容比较多,不总结了,直接看学院君的译文吧,已经写得很详细了 传送门:http://laravelacademy.org/post/6191.html PS1: laravel的关联模型并不是遍历一次 ...
- ionic模版引擎及循环
首先来个官方文档:http://ionicframework.com/docs/api/directive/ionList/ 1)ionic模型引擎的定界符是双大括号 {{}} 2)要使用什么模版变量 ...
- N76E003学习之路(二)
最近一直在想N76E003和STM8M003的对比情况,在网上找了不少资料,看了不少文档,具体总结如下: STM8S003F3P6:一共20个脚,最多支持16个GPIO,支持16个外部中断:2个16位 ...
- orcale增量全量实时同步mysql可支持多库使用Kettle实现数据实时增量同步
1. 时间戳增量回滚同步 假定在源数据表中有一个字段会记录数据的新增或修改时间,可以通过它对数据在时间维度上进行排序.通过中间表记录每次更新的时间戳,在下一个同步周期时,通过这个时间戳同步该时间戳以后 ...