图解kubernetes调度器SchedulerCache核心源码实现
SchedulerCache是kubernetes scheduler中负责本地数据缓存的核心数据结构, 其实现了Cache接口,负责存储从apiserver获取的数据,提供给Scheduler调度器获取Node的信息,然后由调度算法的决策pod的最终node节点,其中Snapshot和节点打散算法非常值得借鉴
设计目标
数据感知
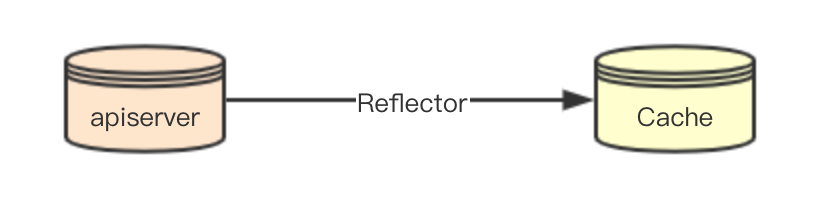
SchedulerCache的数据从apiserver通过网络感知,其数据的同步一致性主要是通过kubernetes中的Reflector组件来负责保证,SchedulerCache本身就是一个单纯数据的存储
Snapshot机制
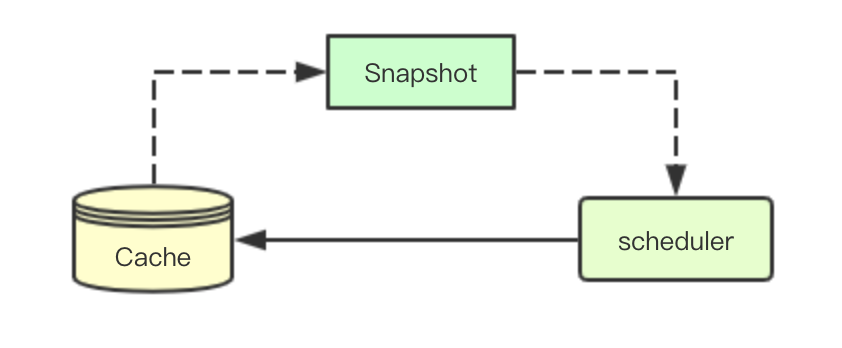
当scheduler获取一个待调度的pod,则需要从Cache中获取当前集群中的快照数据(当前此时集群中node的统计信息), 用于后续调度流程中使用
节点打散

节点打散主要是指的调度器调度的时候,在满足调度需求的情况下,为了保证pod均匀分配到所有的node节点上,通常会按照逐个zone逐个node节点进行分配,从而让pod节点打散在整个集群中
过期删除
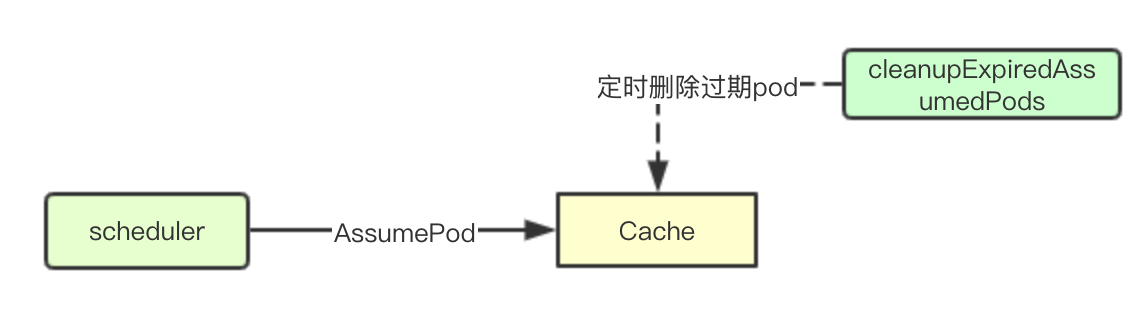
Scheduler进行完成调度流程的决策之后,为pod选择了一个node节点,此时还未进行后续的Bind操作,但实际上资源已经分配给该pod, 此时会先更新到本地缓存(),然后再等待apiserver进行数据的广播并且最终被kubelet来进行实际的调度
但如果因为某些原因导致pod后续的事件都没有被监听到,则需要将对应的pod资源进行删除,并删除对node资源的占用
cache内部pod状态机
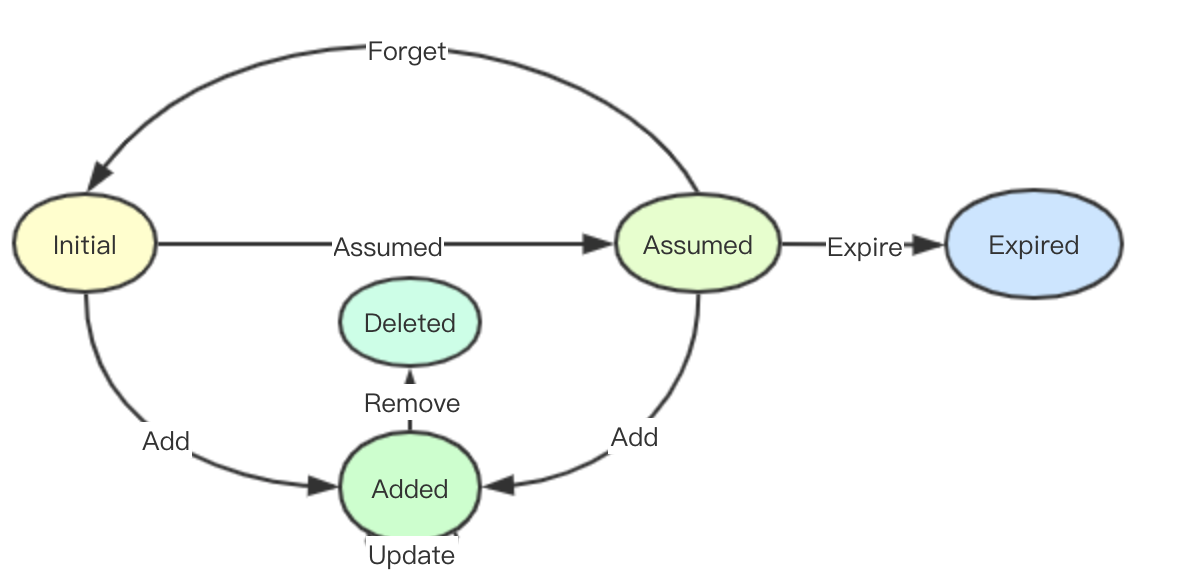
在scheduler cache中pod会一个内部的状态机:initial、Assumed、Expired、Added、Delete,实际上所有的操作都是围绕着该状态机在进行,状态如下:
Initial: 初始化完成从apiserver监听到(也可能是监听到一个已经完成分配的pod)
Assumed: 在scheduler中完成分配最终完成bind操作的pod(未实际分配)
Added: 首先监听到事件可能是一个已经完成实际调度的pod(即从initial到Added),其次可能是经过调度决策后,被实际调度(从Assumed到Added),最后则是后续pod的更新(Update), Added语义上其实就是往Cache中添加一个Pod状态
Deleted: 某个pod被监听到删除事件,只有被Added过的数据才可以被Deleted
Expired: Assumed pod经过一段时间后没有感知到真正的分配事件被删除
源码实现
数据结构
type schedulerCache struct {
stop <-chan struct{}
ttl time.Duration
period time.Duration
// 保证数据的安全
mu sync.RWMutex
// 存储假定pod的信息集合,经过scheduler调度后假定pod被调度到某些节点,进行本地临时存储
// 主要是为了进行node资源的占用,可以通过key在podStats查找到假定的pod信息
assumedPods map[string]bool
// pod的状态
podStates map[string]*podState
// 存储node的映射
nodes map[string]*nodeInfoListItem
csiNodes map[string]*storagev1beta1.CSINode
// node信息的链表,按照最近更新时间来进行连接
headNode *nodeInfoListItem
// 存储node、zone的映射信息
nodeTree *NodeTree
// 镜像信息
imageStates map[string]*imageState
}
Snapshot机制
数据结构
Snapshot数据结构主要负责存储当前集群中的node信息,并且通过Generation记录当前更新的最后一个周期
type Snapshot struct {
NodeInfoMap map[string]*NodeInfo
Generation int64
}
Snapshot的创建与更新
创建主要位于kubernetes/pkg/scheduler/core/generic_scheduler.go,实际上就是创建一个空的snapshot对象
nodeInfoSnapshot: framework.NodeInfoSnapshot(),
数据的更新则是通过snapshot方法来调用Cache的更新接口来进行更新
func (g *genericScheduler) snapshot() error {
// Used for all fit and priority funcs.
return g.cache.UpdateNodeInfoSnapshot(g.nodeInfoSnapshot)
}
借助headNode实现增量标记
随着集群中node和pod的数量的增加,如果每次都全量获取snapshot则会严重影响调度器的调度效率,在Cache中通过一个双向链表和node的递增计数(etcd实现)来实现增量更新
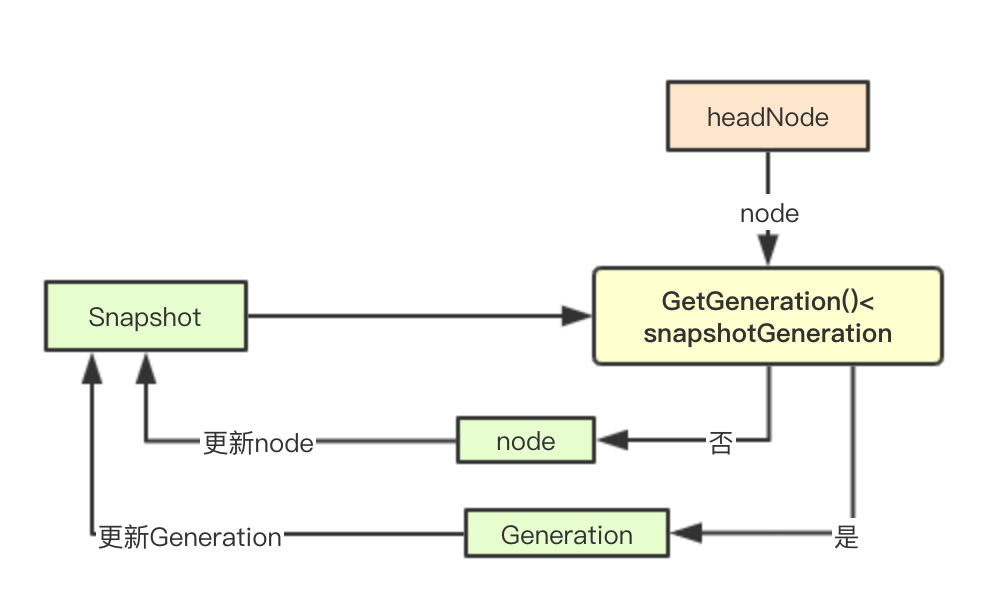
func (cache *schedulerCache) UpdateNodeInfoSnapshot(nodeSnapshot *schedulernodeinfo.Snapshot) error {
cache.mu.Lock()
defer cache.mu.Unlock()
balancedVolumesEnabled := utilfeature.DefaultFeatureGate.Enabled(features.BalanceAttachedNodeVolumes)
// 获取当前snapshot的Genration
snapshotGeneration := nodeSnapshot.Generation
// 遍历双向链表,更新snapshot信息
for node := cache.headNode; node != nil; node = node.next {
if node.info.GetGeneration() <= snapshotGeneration {
//所有node信息都更新完毕
break
}
if balancedVolumesEnabled && node.info.TransientInfo != nil {
// Transient scheduler info is reset here.
node.info.TransientInfo.ResetTransientSchedulerInfo()
}
if np := node.info.Node(); np != nil {
nodeSnapshot.NodeInfoMap[np.Name] = node.info.Clone()
}
}
// 更新snapshot的genration
if cache.headNode != nil {
nodeSnapshot.Generation = cache.headNode.info.GetGeneration()
}
// 如果snapshot里面包含过期的pod信息则进行清理工作
if len(nodeSnapshot.NodeInfoMap) > len(cache.nodes) {
for name := range nodeSnapshot.NodeInfoMap {
if _, ok := cache.nodes[name]; !ok {
delete(nodeSnapshot.NodeInfoMap, name)
}
}
}
return nil
}
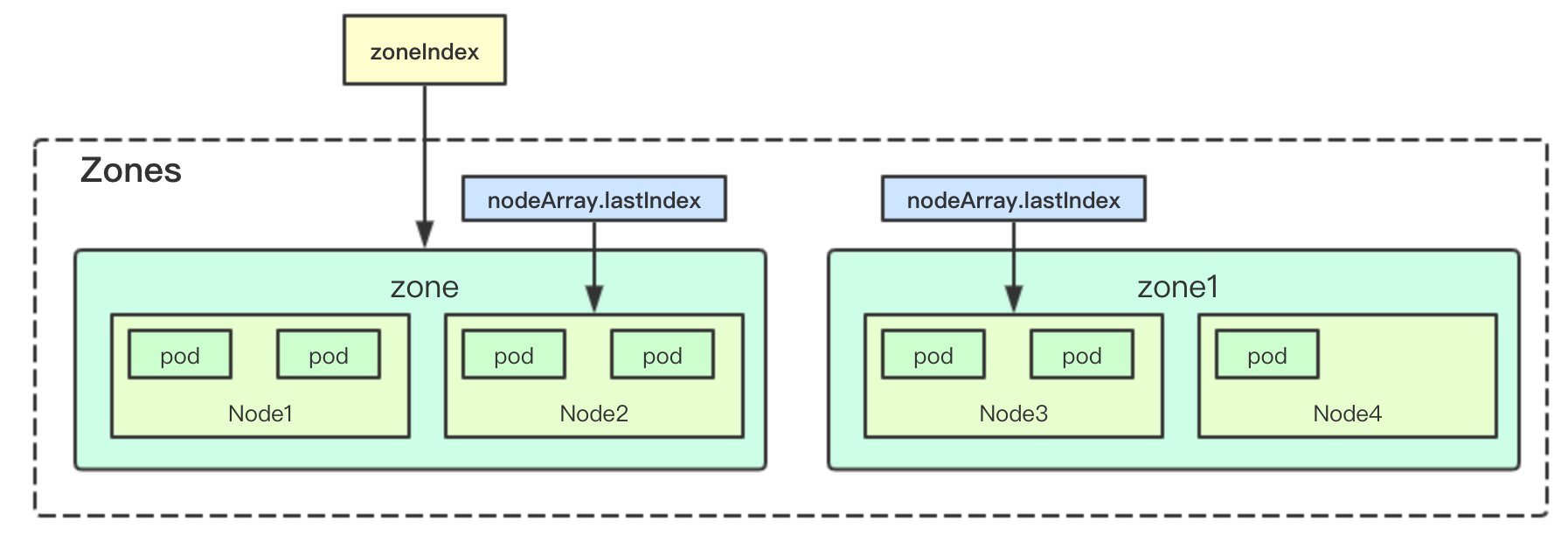
nodeTree
nodeTree主要负责节点的打散,用于让pod均匀分配在多个zone中的node节点上
2.3.1 数据结构
type NodeTree struct {
tree map[string]*nodeArray // 存储zone和zone下面的node信息
zones []string // 存储zones
zoneIndex int
numNodes int
mu sync.RWMutex
}
其中zones和zoneIndex主要用于后面的节点打散算法使用,实现按zone逐个分配
nodeArray
nodeArray负责存储一个zone下面的所有node节点,并且通过lastIndex记录当前zone分配的节点索引
type nodeArray struct {
nodes []string
lastIndex int
}
添加node
添加node其实很简单,只需要获取对应node的zone信息,然后加入对应zone的nodeArray中
func (nt *NodeTree) addNode(n *v1.Node) {
// 获取zone
zone := utilnode.GetZoneKey(n)
if na, ok := nt.tree[zone]; ok {
for _, nodeName := range na.nodes {
if nodeName == n.Name {
klog.Warningf("node %q already exist in the NodeTree", n.Name)
return
}
}
// 吧节点加入到zone中
na.nodes = append(na.nodes, n.Name)
} else {
// 新加入zone
nt.zones = append(nt.zones, zone)
nt.tree[zone] = &nodeArray{nodes: []string{n.Name}, lastIndex: 0}
}
klog.V(2).Infof("Added node %q in group %q to NodeTree", n.Name, zone)
nt.numNodes++
}
数据打散算法
数据打散算法很简单,首先我们存储了zone和nodeArray的信息,然后我们只需要通过两个索引zoneIndex和nodeIndex就可以实现节点的打散操作, 只有当当前集群中所有zone里面的所有节点都进行一轮分配后,然后重建分配索引
func (nt *NodeTree) Next() string {
nt.mu.Lock()
defer nt.mu.Unlock()
if len(nt.zones) == 0 {
return ""
}
// 记录分配完所有node的zone的计数,用于进行状态重置
// 比如有3个zone: 则当numExhaustedZones=3的时候,就会重新从头开始进行分配
numExhaustedZones := 0
for {
if nt.zoneIndex >= len(nt.zones) {
nt.zoneIndex = 0
}
// 按照zone索引来进行逐个zone分配
zone := nt.zones[nt.zoneIndex]
nt.zoneIndex++
// 返回当前zone下面的next节点,如果exhausted为True则表明当前zone所有的节点,在这一轮调度中都已经分配了一次
// 就需要从下个zone继续获取节点
nodeName, exhausted := nt.tree[zone].next()
if exhausted {
numExhaustedZones++
// 所有的zone下面的node都被分配了一次,这里进行重置,从头开始继续分配
if numExhaustedZones >= len(nt.zones) { // all zones are exhausted. we should reset.
nt.resetExhausted()
}
} else {
return nodeName
}
}
}
重建索引
重建索引则是将所有nodeArray的索引和当前zoneIndex进行归零
func (nt *NodeTree) resetExhausted() {// 重置索引
for _, na := range nt.tree {
na.lastIndex = 0
}
nt.zoneIndex = 0
}
数据过期清理
数据存储
Cache要定时将之前在经过本地scheduler分配完成后的假设的pod的信息进行清理,如果这些pod在给定时间内仍然没有感知到对应的pod真正的添加事件则就这些pod删除
assumedPods map[string]bool
后台定时任务
默认每30s进行清理一次
func (cache *schedulerCache) run() {
go wait.Until(cache.cleanupExpiredAssumedPods, cache.period, cache.stop)
}
清理逻辑
清理逻辑主要是针对那些已经完成绑定的pod来进行,如果一个pod完成了在scheduler里面的所有操作后,会有一个过期时间,当前是30s,如果超过该时间即deadline小于当前的时间就删除该pod
// cleanupAssumedPods exists for making test deterministic by taking time as input argument.
func (cache *schedulerCache) cleanupAssumedPods(now time.Time) {
cache.mu.Lock()
defer cache.mu.Unlock()
// The size of assumedPods should be small
for key := range cache.assumedPods {
ps, ok := cache.podStates[key]
if !ok {
panic("Key found in assumed set but not in podStates. Potentially a logical error.")
}
// 未完成绑定的pod不会被进行清理
if !ps.bindingFinished {
klog.V(3).Infof("Couldn't expire cache for pod %v/%v. Binding is still in progress.",
ps.pod.Namespace, ps.pod.Name)
continue
}
// 在完成bind之后会设定一个过期时间,目前是30s,如果deadline即bind时间+30s小于当前时间就过期删除
if now.After(*ps.deadline) {
klog.Warningf("Pod %s/%s expired", ps.pod.Namespace, ps.pod.Name)
if err := cache.expirePod(key, ps); err != nil {
klog.Errorf("ExpirePod failed for %s: %v", key, err)
}
}
}
}
清理pod
清理pod主要分为如下几个部分:
1.对应pod假定分配node的信息
2.清理映射的podState信息
func (cache *schedulerCache) expirePod(key string, ps *podState) error {
if err := cache.removePod(ps.pod); err != nil {
return err
}
delete(cache.assumedPods, key)
delete(cache.podStates, key)
return nil
}
设计总结
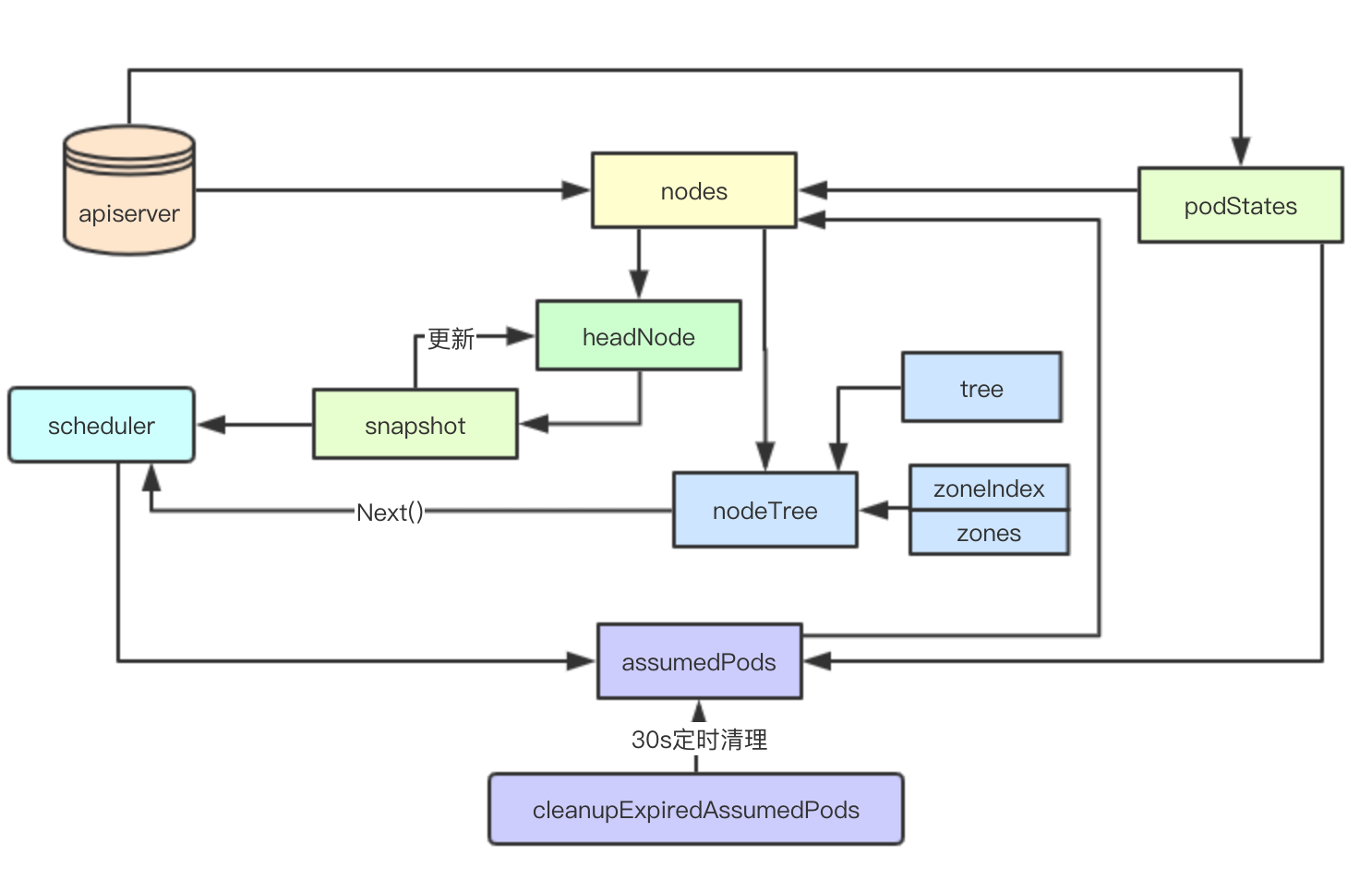
核心数据结构数据流如上所示,其核心是通过nodes、headNode实现一个Snapshot为调度器提供当前系统资源的快照,并通过nodeTree进行node节点的打散,最后内部通过一个pod的状态机来进行系统内部的pod资源状态的转换,并通过后台的定时任务来保证经过经过Reflector获取的数据的最终一致性(删除那些经过bind的但是却没被实际调度或者事件丢失的pod), 借助这些其实一个最基础的工业级调度器的本地cache功能就实现了
微信号:baxiaoshi2020
关注公告号阅读更多源码分析文章
更多文章关注 www.sreguide.com
本文由博客一文多发平台 OpenWrite 发布


图解kubernetes调度器SchedulerCache核心源码实现的更多相关文章
- 图解kubernetes调度器SchedulingQueue核心源码实现
SchedulingQueue是kubernetes scheduler中负责进行等待调度pod存储的对,Scheduler通过SchedulingQueue来获取当前系统中等待调度的Pod,本文主要 ...
- Java内存管理-掌握类加载器的核心源码和设计模式(六)
勿在流沙筑高台,出来混迟早要还的. 做一个积极的人 编码.改bug.提升自己 我有一个乐园,面向编程,春暖花开! 上一篇文章介绍了类加载器分类以及类加载器的双亲委派模型,让我们能够从整体上对类加载器有 ...
- 图解kubernetes调度器ScheduleAlgorithm核心实现学习框架设计
ScheduleAlgorithm是一个接口负责为pod选择一个合适的node节点,本节主要解析如何实现一个可扩展.可配置的通用算法框架来实现通用调度,如何进行算法的统一注册和构建,如何进行metad ...
- 图解kubernetes调度器预选设计实现学习
Scheduler中在进行node选举的时候会首先进行一轮预选流程,即从当前集群中选择一批node节点,本文主要分析k8s在预选流程上一些优秀的筛选设计思想,欢迎大佬们指正 1. 基础设计 1.1 预 ...
- 图解kubernetes调度器抢占流程与算法设计
抢占调度是分布式调度中一种常见的设计,其核心目标是当不能为高优先级的任务分配资源的时候,会通过抢占低优先级的任务来进行高优先级的调度,本文主要学习k8s的抢占调度以及里面的一些有趣的算法 1. 抢占调 ...
- 图解kubernetes调度器SchedulerExtender扩展
在kubernetes的scheduler调度器的设计中为用户预留了两种扩展机制SchdulerExtender与Framework,本文主要浅谈一下SchdulerExtender的实现, 因为还有 ...
- HTTP流量神器Goreplay核心源码详解
摘要:Goreplay 前称是 Gor,一个简单的 TCP/HTTP 流量录制及重放的工具,主要用 Go 语言编写. 本文分享自华为云社区<流量回放工具之 goreplay 核心源码分析> ...
- kubernetes 调度器
调度器 kube-scheduler 是 kubernetes 的核心组件之一,主要负责整个集群资源的调度功能,根据特定的调度算法和策略,将 Pod 调度到最优的工作节点上面去,从而更加合理.更加充分 ...
- Android版数据结构与算法(五):LinkedHashMap核心源码彻底分析
版权声明:本文出自汪磊的博客,未经作者允许禁止转载. 上一篇基于哈希表实现HashMap核心源码彻底分析 分析了HashMap的源码,主要分析了扩容机制,如果感兴趣的可以去看看,扩容机制那几行最难懂的 ...
随机推荐
- title与h1的区别、b与strong的区别、i与em的区别?
title与h1的区别 定义: title是网站标题, h1是文章主题 作用: title概括网站信息,可以直接告诉搜索引擎和用户这 个网站是关于什么主题和内容的,是显示在网页Tab栏里的: h1突出 ...
- javaObject类
所有类的公共父类,一旦一个类没有显示地继承一个类则其直接父类一定是Object. 一切数据类型都可用Object接收 class OOXX extends Object{}等价于class ooXX ...
- python模块之random模块
random模块 随机模块,用于处理随机问题. import random # 随机整数 print(random.randint(0, 9)) # 0到9之间随机一个整数 print(random. ...
- window 系统下修改`CMD`的编码格式的方法,`CHCP` 的 使用
CHCP的使用 CHCP是一个计算机指令,能够显示或设置活动代码页编号. 一般上是在命令提示框中使用,用来查询和修改命令提示框的编码格式 具体使用方法 查看活动代码页编号 方式1: >>& ...
- win10 uwp 使用 AppCenter 自动构建
微软在今年7月上线 appcenter.ms 这个网站,通过 App Center 可以自动对数千种设备进行适配测试.快速将应用发送给测试者或者直接发布到应用商店.做到开发的构建和快速测试,产品的遥测 ...
- Anagram——[枚举全排列]
预备知识: 1.求0—n个数全排列的算法: void print_permutation(int n,int *A,int cur){ if(cur==n){ ;i<cur;i++) cout& ...
- H3C 各类路由默认优先级
- javascript中的深拷贝与浅拷贝
javascript中的深拷贝与浅拷贝 基础概念 在了解深拷贝与浅拷贝的时候需要先了解一些基础知识 核心知识点之 堆与栈 栈(stack)为自动分配的内存空间,它由系统自动释放: 堆(heap)则是动 ...
- 【51.64%】【POJ 1330】Nearest Common Ancestors
Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 26416 Accepted: 13641 Description A roote ...
- vuejs 数据视图不更新
由于 JavaScript 的限制,Vue 不能检测对象属性的添加或删除 可以使用 Vue.set(object, key, value) 方法向嵌套对象添加响应式属性 数组 this.$set(ar ...