behavior planning——15.cost function design weightTweaking
Designing cost functions is difficult and getting them all to cooperate to produce reasionable vehicle behavior is hard.
some of the difficulties associated with cost function design include solving new problems without unsolving old ones.
when you are working on a self-driving car,you may find that the vehicle is behaving reasonably well except for some
particular situations.Maybe it is not being aggressive enough about making left turns at traffic lights.
So, in an effort to solve this problem, you either add new cost funcions, tweak existing ones, or modify weights.But every time you do, there is chance that you will introduce some breaking change into something that already works.
in pracice ,we solve this throuth regression testing, where we define some set of situations, Then ,whenever we make a change, we simulate the viheicle in all of our test cases and make sure that it still behaves expected.
We won't say more about testing here, but it is an important part of developing software in a safety-cricical application.
The next difficulty is balancing costs of drastically different magnitudes.
Because, yes ,we want to get to our destination efficiently, but if we are in a situation where safety is an issue,
we want to solve that problem and not think about efficiency at all. one way to do that is to have weights which reflect
the type of problem the cost function addresses. so we want to most heavily penalize any behavior which simply is not possible due to physics, then we want to think about safety ,legality ,comfort.
And only once those are satisfied do we want to think about efficiency. But we alse may want to adjust the relative importance if these weights depending on situation. If a light turns red ,for example,legality becomes a much more relevant
concern than when we engage in normal highway driving . this leads us to out last difficulty, reasoning about individual cost functions. Ideally, each cost function will serve a very specific responsibility.
which is something we do not do in our earlier example of s speed cost function.
We were trying to balance out desire to drive quickly, which has to do with efficiency, with out desire to not exceed the speed limit , which is legality. In practice, we might want to difine several cost functions associated with vehicle speed.
In which case we might have a binary cost function which just checks to see if we are breaking the speed limit and the continuous cost function which pulls us towards out target speed.
By assigning each cost function to a very specific role, like safety versus legality versus efficiency, we can then standardize the output of all cost functions to be between -1 and 1. Additionlly, It is helpful to paraetrize whenever possible.
This allows us to use some parameter optimization technique like gradient descent along with our set of regression tests to
programmatically tweak our cost functions. Finally ,thinking in terms of vehicle state is helpful. The things we can indirestly
control about our vehicle are it is position, velocity, and acceleration. It can be helpful to keep these in mind when coming up with cost functions. Let is walk through an example.
Say we want to think about the following classer of cost functions.
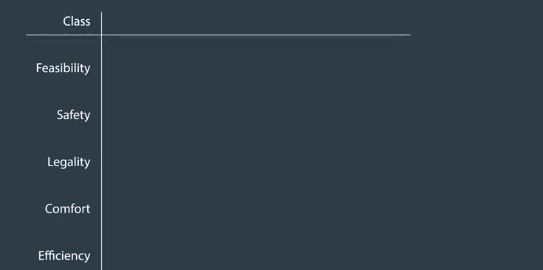
And to make it easier, to keep everything straight,let is think in terms of position, velocity ,and acceleration.
The binary "Are we exceeding the speed? "cost functin would go here, then the cost function that wanted to keep us close
to the speed limit would go here. and now ,instead of being that weird discontinuous gragh we made earlier, this could just be some parabola like this.
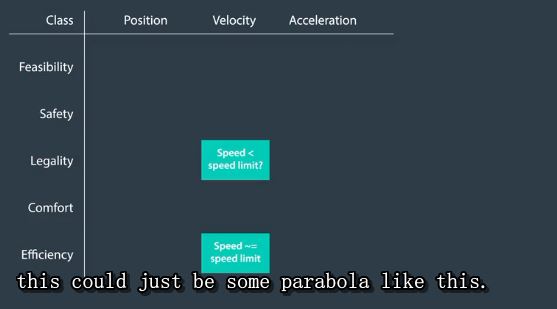

And even though the cost of this is low even for speeds that exceed the speed limit, that is OK because we have our
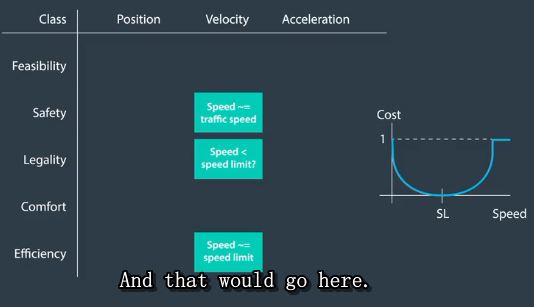
binary cost function which would prevent that behavior. Continuing to think about speed, we also might want to try to
drive at a speed that is close to the average speed of traffic, for safety reasons ,even if that speed is above or below the
speed limit. And that would go here.
In the position column, we would have an obvious feasibility concern which is collision avoidance.
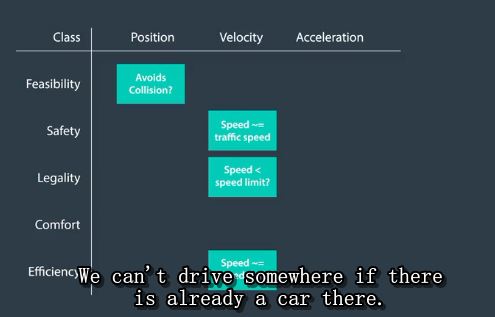
We can not drive somewhere if there is already a car there. Then, for safety reasons, wo would want the buffer distance,

which tries to keep us far from other vehicles, and the cost function which checks to make sure we are driving on the road
near the center of our lane and in a lane that is close to our goal lane.

For acceleration, we would first want to make sure we only consider behaviors that the car can execute,
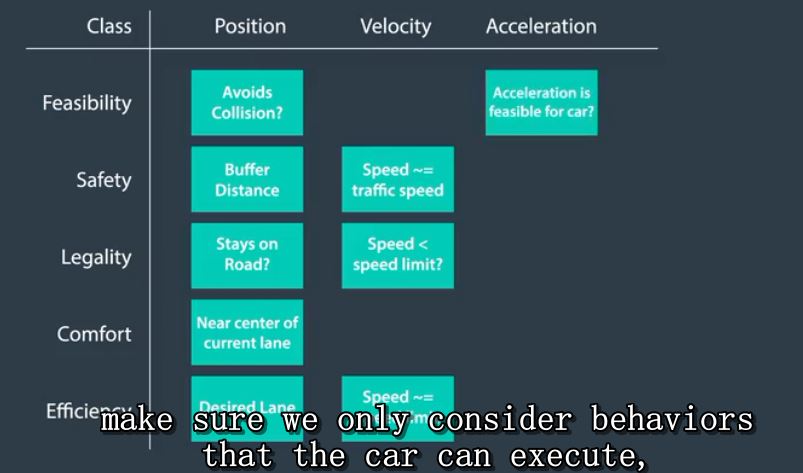
Make sure we only consider behaviors that the car can execute, and then we would want to avoid having any rapid changes in acceleration because those are perceived as uncomfortable.
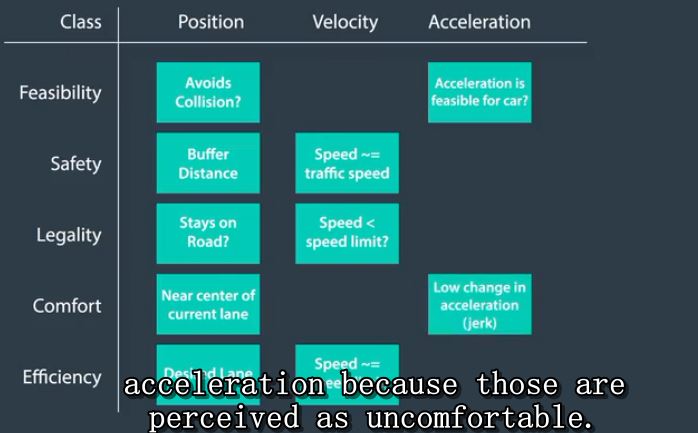
This is also known as jerk as which you will learn more about in the next lesson.
consider a merge onto a highway, for example.
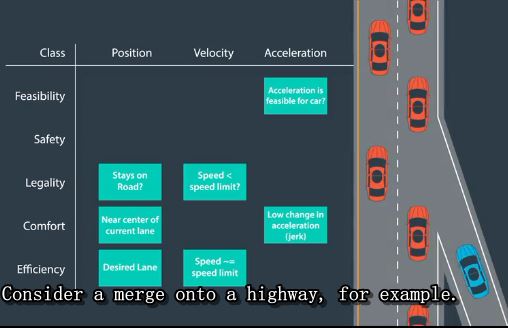
This is a potentially dangerous situation where we really want to get up to traffic speed as quickly as possible.
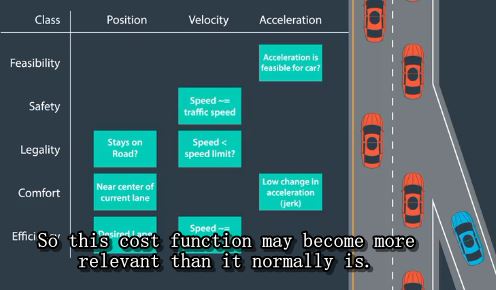
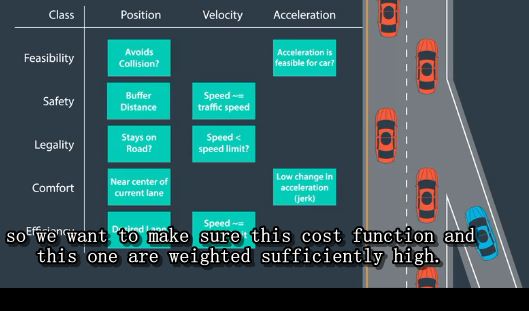
So this cost function may become more relevant than it mormally is. But we alse want to make sure that we yield if there
is not really a gap, so we want to make sure this cost funcion and this one are weighted sufficiently high.
and we can compare these merge priorities to a different situation.
for examle, a car approaching a green light that suddenly turns yellow.
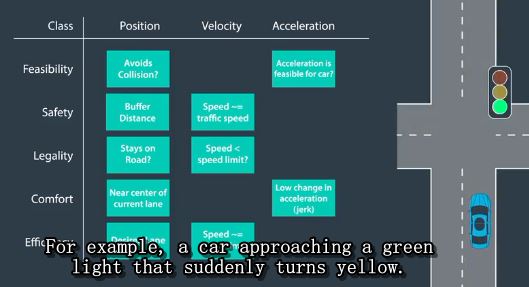
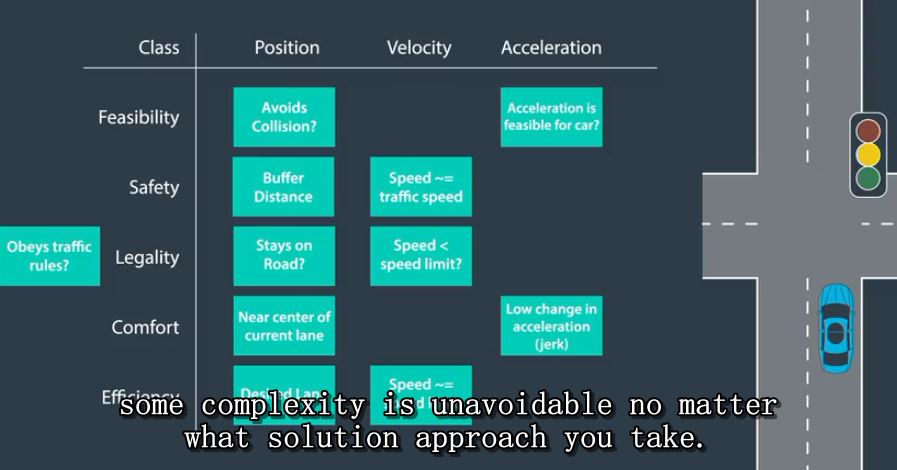
In this situation, we would probably want to boost the weights associated with legality and would probably need to
add a whole new cost function for obeying traffic rules.
now that do not fall neatly into the position, velocity ,or acceleration classes, so I will just put it over here.
If this is all starting to feel like it is getting pretty complex ,well,you are right.
It is pretty hard to aviod this exploding complexity when using finite state machines.
Partially that is because of the finite state machine itself, but we are also trying to solve a very hard problem and
some complexity is unavoidable no matter what solution approach you take.
behavior planning——15.cost function design weightTweaking的更多相关文章
- behavior planning——13. implement a cost function in C++
In the previous quizzes, you designed a cost function to choose a lane when trying to reach a goal i ...
- behavior planning——11 create a cost function speed penalty
A key part of getting transitions to happen when we want them to is the design of reasonable cost ...
- behavior planning——14.implement a cost function in C++
n most situations, a single cost function will not be sufficient to produce complex vehicle behavior ...
- behavior planning——12.example cost funtion -lane change penalty
In the image above, the blue self driving car (bottom left) is trying to get to the goal (gold sta ...
- Model Representation and Cost Function
Model Representation To establish notation for future use, we’ll use x(i) to denote the “input” vari ...
- 吴恩达机器学习笔记 - cost function and gradient descent
一.简介 cost fuction是用来判断机器预算值和实际值得误差,一般来说训练机器学习的目的就是希望将这个cost function减到最小.本文会介绍如何找到这个最小值. 二.线性回归的cost ...
- loss function与cost function
实际上,代价函数(cost function)和损失函数(loss function 亦称为 error function)是同义的.它们都是事先定义一个假设函数(hypothesis),通过训练集由 ...
- 【caffe】loss function、cost function和error
@tags: caffe 机器学习 在机器学习(暂时限定有监督学习)中,常见的算法大都可以划分为两个部分来理解它 一个是它的Hypothesis function,也就是你用一个函数f,来拟合任意一个 ...
- 逻辑回归损失函数(cost function)
逻辑回归模型预估的是样本属于某个分类的概率,其损失函数(Cost Function)可以像线型回归那样,以均方差来表示:也可以用对数.概率等方法.损失函数本质上是衡量”模型预估值“到“实际值”的距离, ...
随机推荐
- Python学习(一) 安装,环境搭建,IDE
第一篇废话太多了,我的博客最主要的是给自己看的,大家觉得还凑合也可以看看,能说自己想法的就更好了,因为一个人的思想是有局限性的.集思广益,自己的认知才不会被禁锢. 注:其他的系统没装,在Windows ...
- Codevs1922 骑士共存问题
1922 骑士共存问题 题目描述 Description 在一个n*n个方格的国际象棋棋盘上,马(骑士)可以攻击的棋盘方格如图所示.棋盘上某些方格设置了障碍,骑士不得进入. 对于给定的n*n个方格的国 ...
- vue+ElementUI项目中,input只能输入正整数的验证
代码如下: <el-input v-model="famount" placeholder="请输入内容" @keyup.native=&q ...
- Etag 和 If-None-Match
ETag是HTTP1.1中才加入的一个属性,用来帮助服务器控制Web端的缓存验证. 它的原理是这样的,当浏览器请求服务器的某项资源(A)时, 服务器根据A算出一个哈希值(3f ...
- ASP.NET+C#面试题
1.维护数据库的完整性.一致性.你喜欢用触发器还是自写业务逻辑?为什么? 尽可能用约束(包括CHECK.主键.唯一键.外键.非空字段)实现,这种方式的效率最好:其次用触发器,这种方式可以保证无论何种业 ...
- Win7下IIS的安装配置与文件发布
出于兴趣,抽空弄了一下Windows上的IIS,把过程记录下来与大家分享.高手请略过... 一.安装IIS.打开控制面板,单击“程序与功能” 二.点击左侧“打开或关闭Windows功能” 三.找到“I ...
- React高阶组件 和 Render Props
高阶组件 本质 本质是函数,将组件作为接收参数,返回一个新的组件.HOC本身不是React API,是一种基于React组合的特而形成的设计模式. 解决的问题(作用) 一句话概括:功能的复用,减少代码 ...
- js读取解析JSON数据(转)
JSON(JavaScript Object Notation) 是一种轻量级的数据交换格式,采用完全独立于语言的文本格式,是理想的数据交换格式.同时,JSON是 JavaScript 原生格式,这意 ...
- python mooc 3维可视化<第一周第一单元>
基本含义 数据->图像 分类 重点关注空间数据的可视化 方法 二维标量数据场 三维标量数据场 二位标量数据场 颜色映射法 等值线法 立体图法 层次分割法 三维标量数据场 面绘制法 体绘制法 展示 ...
- Leetcode704.Binary Search二分查找
给定一个 n 个元素有序的(升序)整型数组 nums 和一个目标值 target ,写一个函数搜索 nums 中的 target,如果目标值存在返回下标,否则返回 -1. 示例 1: 输入: num ...