《linux设备驱动开发详解》笔记——12linux设备驱动的软件架构思想
本章重点讲解思想、思想、思想。
12.1 linux驱动的软件架构
下述三种思想,在linux的spi、iic、usb等复杂驱动里广泛使用。后面几节分别对这些思想进行详细说明。
- 思想1:驱动与设备分离,linux采用总线、设备和驱动模型,驱动只管驱动,设备只管设备,总线负责匹配设备和驱动;驱动从标准途径拿到板级信息(设备信息,现在都已dts的形式存在),这样驱动就可以放之四海而皆准了,结构如下图。
说到“总线”,有很多种,如I2C、SPI等,linux还为没有硬件总线的设备提出一种虚拟总线,即platform总线,同时还有对应的platform设备和platform驱动。
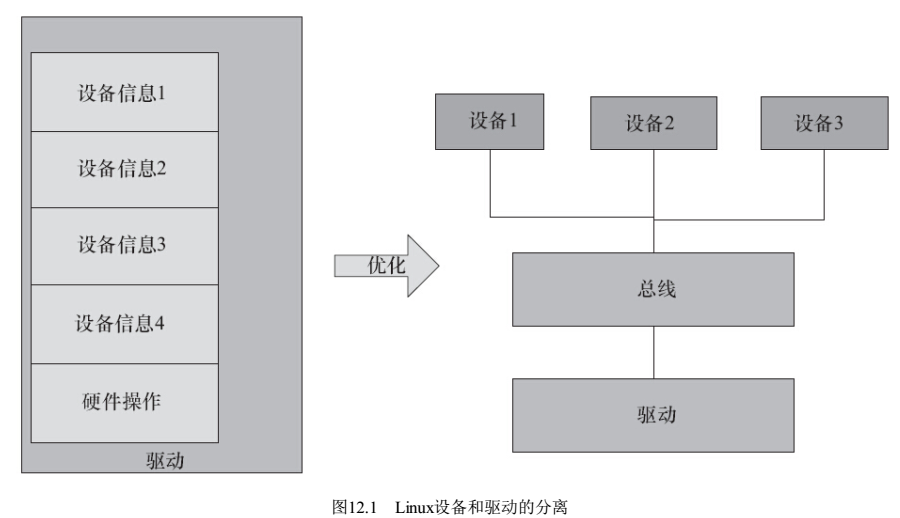
为啥? linux驱动要支持很多硬件,如果把设备信息写到驱动里,驱动会有非常多分支,一堆东西揉到一起,换成一锅粥,所以要把设备和驱动分开。
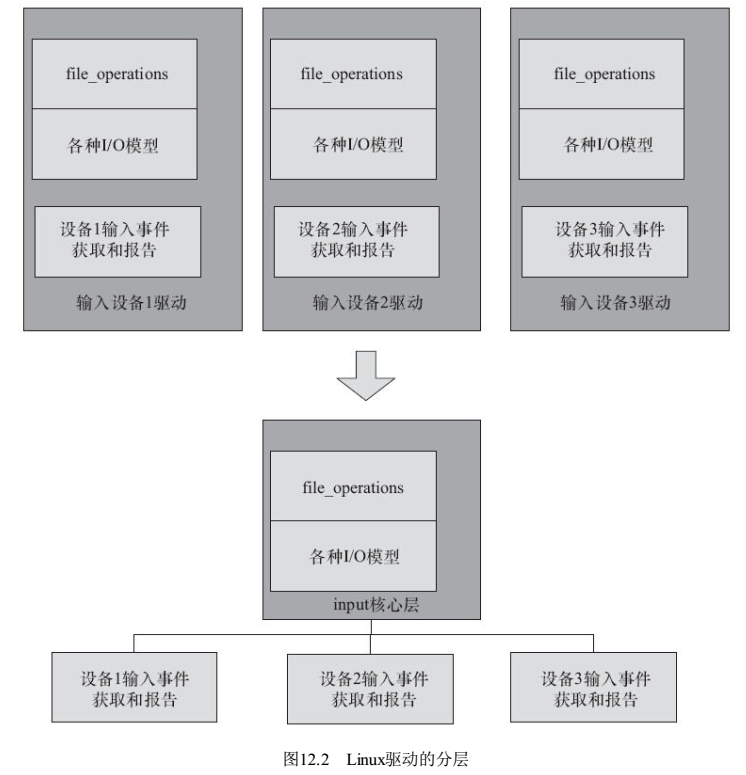
- 思想2:分层设计思想,file_opretations、IO模型等,是很多驱动共有的部分,linux提炼出一个中间层,把这些部分封装起来,供所有驱动使用。这就引出了软件分层的思想。
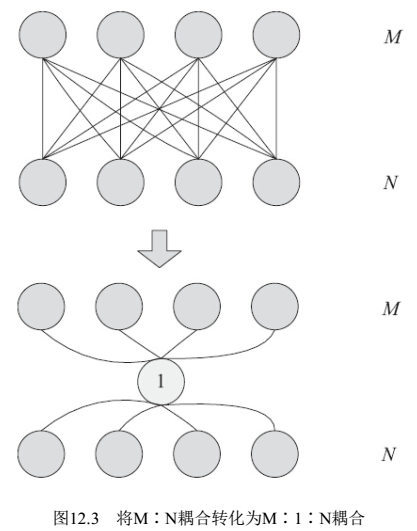
- 思想3:主机与外设分隔的思想。例如spi分为主机和外设,不同CPU有M种spi主机,同时不通外设也有N种,如果直接交叉支持,势必有M*N种组合,代码会非常复杂。需要在主机和外设中间插入一个标准API,把M和N分隔开,主机和外设都使用标准API与中间的分隔层接口,这样只需要实现M个主机和N个外设驱动即可,这种思想也叫“高内聚,低耦合”
12.2 platform设备驱动
12.2.1 platform总线、设备与驱动
- linux 2.6以后,采用总线、设备、驱动模型;
- platform的引入:有些设备本身依附一种总线,例如IIC、SPI、PCI、SPI等,很容易实现linux的总线/设备/驱动模型;但有些设备不依赖总线,例如SOC系统内部集成的独立外设控制器等,基于这种情况,linux发明了一种虚拟总线,即platform总线,对应的设备和驱动分别为platform_device和platform_driver。
- platform device不是针对linux的字符设备、块设备、网络设备的,是linux的一种附加手段。SOC内部集成的各控制器,例如IIC、RTC、LCD等一般都归纳为platform device。
- platform作为一种虚拟总线,与其他实体总线地位对等,例如SPI/IIC总线等,掌握了platform总线,其他总线也是类似的。
关键数据结构:
1. device
#include <linux/platform_device.h>
struct platform_device {
const char *name;
int id;
bool id_auto;
struct device dev; // linux/device.h里定义,总线match时,实际match的是dev,所有设备共性的部分
u32 num_resources; // 资源
struct resource *resource;
const struct platform_device_id *id_entry;
/* MFD cell pointer */
struct mfd_cell *mfd_cell;
/* arch specific additions */
struct pdev_archdata archdata;
};
2.driver
#include <linux/platform_device.h>
// probe等函数由内核的platform机制实现了,驱动需要填充driver结构体
struct platform_driver {
int (*probe)(struct platform_device *);
int (*remove)(struct platform_device *);
void (*shutdown)(struct platform_device *);
int (*suspend)(struct platform_device *, pm_message_t state); // 电源管理,基本不用了,有driver里的
int (*resume)(struct platform_device *); // 同上
struct device_driver driver; // 所有驱动共享的部分,match以后driver.probe执行,同时调用外层platform_driver的prove执行
const struct platform_device_id *id_table; // 一组ID表
bool prevent_deferred_probe;
}; // linux/device.h
/**
* struct device_driver - The basic device driver structure
* @name: Name of the device driver.
* @bus: The bus which the device of this driver belongs to.
* @owner: The module owner.
* @mod_name: Used for built-in modules.
* @suppress_bind_attrs: Disables bind/unbind via sysfs.
* @of_match_table: The open firmware table.
* @acpi_match_table: The ACPI match table.
* @probe: Called to query the existence of a specific device,
* whether this driver can work with it, and bind the driver
* to a specific device.
* @remove: Called when the device is removed from the system to
* unbind a device from this driver.
* @shutdown: Called at shut-down time to quiesce the device.
* @suspend: Called to put the device to sleep mode. Usually to a
* low power state.
* @resume: Called to bring a device from sleep mode.
* @groups: Default attributes that get created by the driver core
* automatically.
* @pm: Power management operations of the device which matched
* this driver.
* @p: Driver core's private data, no one other than the driver
* core can touch this.
*
* The device driver-model tracks all of the drivers known to the system.
* The main reason for this tracking is to enable the driver core to match
* up drivers with new devices. Once drivers are known objects within the
* system, however, a number of other things become possible. Device drivers
* can export information and configuration variables that are independent
* of any specific device.
*/
struct device_driver {
const char *name;
struct bus_type *bus; // 对应总线结构体指针 struct module *owner;
const char *mod_name; /* used for built-in modules */ bool suppress_bind_attrs; /* disables bind/unbind via sysfs */ const struct of_device_id *of_match_table;
const struct acpi_device_id *acpi_match_table; int (*probe) (struct device *dev); // 总线match完设备和驱动以后,这个函数会执行,
// 形参dev就是被match的设备信息!!!
int (*remove) (struct device *dev);
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
const struct attribute_group **groups; const struct dev_pm_ops *pm; struct driver_private *p;
};
3.总线
总线的类型为bus_type,内核直接为platform定义了一个总线实体
// drivers/base/platform.c,这些函数都是现成的,在platform机制里实现了。
struct bus_type platform_bus_type = {
.name = "platform",
.dev_groups = platform_dev_groups,
.match = platform_match, // 匹配函数,关键
.uevent = platform_uevent,
.pm = &platform_dev_pm_ops,
}; /**
* platform_match - bind platform device to platform driver.
* @dev: device.
* @drv: driver.
*
* Platform device IDs are assumed to be encoded like this:
* "<name><instance>", where <name> is a short description of the type of
* device, like "pci" or "floppy", and <instance> is the enumerated
* instance of the device, like '0' or '42'. Driver IDs are simply
* "<name>". So, extract the <name> from the platform_device structure,
* and compare it against the name of the driver. Return whether they match
* or not.
*/
static int platform_match(struct device *dev, struct device_driver *drv)
{
struct platform_device *pdev = to_platform_device(dev);
struct platform_driver *pdrv = to_platform_driver(drv); /* Attempt an OF style match first */ // 基于dts匹配优先级最高
if (of_driver_match_device(dev, drv))
return ; /* Then try ACPI style match */
if (acpi_driver_match_device(dev, drv))
return ; /* Then try to match against the id table */ // 基于platform device和platform driver的ID
if (pdrv->id_table)
return platform_match_id(pdrv->id_table, pdev) != NULL; /* fall-back to driver name match */ // 基于名字
return (strcmp(pdev->name, drv->name) == );
}
linux 2.6以及之前版本,platform device通常定义在板级bsp里,然后再add;而3.x以后,改为自动展开dts,形成若干device。
12.2.2 将globalmem作为platform设备
没法实验,只罗列代码。
static int globalfifo_probe(struct platform_device *pdev) // 完成原来globalmem_init的任务
{
int ret;
dev_t devno = MKDEV(globalfifo_major, ); if (globalfifo_major)
ret = register_chrdev_region(devno, , "globalfifo");
else {
ret = alloc_chrdev_region(&devno, , , "globalfifo");
globalfifo_major = MAJOR(devno);
}
if (ret < )
return ret; globalfifo_devp = devm_kzalloc(&pdev->dev, sizeof(*globalfifo_devp),GFP_KERNEL);
if (!globalfifo_devp) {
ret = -ENOMEM;
goto fail_malloc;
} globalfifo_setup_cdev(globalfifo_devp, ); mutex_init(&globalfifo_devp->mutex);
init_waitqueue_head(&globalfifo_devp->r_wait);
init_waitqueue_head(&globalfifo_devp->w_wait); return ; fail_malloc:
unregister_chrdev_region(devno, );
return ret;
} static int globalfifo_remove(struct platform_device *pdev) // 完成原来globalmem_exit的任务
{
cdev_del(&globalfifo_devp->cdev);
unregister_chrdev_region(MKDEV(globalfifo_major, ), ); return ;
} static struct platform_driver globalfifo_driver = {
.driver = {
.name = "globalfifo",
.owner = THIS_MODULE,
},
.probe = globalfifo_probe,
.remove = globalfifo_remove,
}; module_platform_driver(globalfifo_driver); // !!!注册platform驱动,/sys/bus/platform/drivers/globalmem,多出一个globalmem子目录
// 在板级bsp里(arch/arm/mach-xxx/mach-yyy.c,xxx为SOC名,yyy为board名)增加platform device,
// 系统初始化时添加到系统里,/sys/device/platform/globalmem,多出一个globalmem子目录,该目录中有driver符号链接,
// 指向/sys/bus/platform/drivers/globalmem
static struct platform_device globalfifo_device = {
.name = "globalfifo",
.id = -,
};
12.2.3 platform设备资源和数据
在platform_device结构体中,有resource结构体,表示该device的资源,start和end随flag的变化而表示不同的含义:
flag:
IORESOURCE_MEM,start和end表示platform device占据的开始开始地址和结束地址
- IORESOURCE_IRQ,start和end表示使用中断号的开始值和结束值,如果只有1个中断号,则开始值和结束值相同
resource在板级支持包或者dts里定义,dts的定义后续说明,板级支持包都淘汰了,不再说明。
* nesting etc..
*/
struct resource {
resource_size_t start;
resource_size_t end;
const char *name;
unsigned long flags;
struct resource *parent, *sibling, *child;
}; /*
* IO resources have these defined flags.
*/
#define IORESOURCE_BITS 0x000000ff /* Bus-specific bits */ #define IORESOURCE_TYPE_BITS 0x00001f00 /* Resource type */
#define IORESOURCE_IO 0x00000100 /* PCI/ISA I/O ports */
#define IORESOURCE_MEM 0x00000200
#define IORESOURCE_REG 0x00000300 /* Register offsets */
#define IORESOURCE_IRQ 0x00000400
#define IORESOURCE_DMA 0x00000800
#define IORESOURCE_BUS 0x00001000 #define IORESOURCE_PREFETCH 0x00002000 /* No side effects */
#define IORESOURCE_READONLY 0x00004000
#define IORESOURCE_CACHEABLE 0x00008000
#define IORESOURCE_RANGELENGTH 0x00010000
#define IORESOURCE_SHADOWABLE 0x00020000 #define IORESOURCE_SIZEALIGN 0x00040000 /* size indicates alignment */
#define IORESOURCE_STARTALIGN 0x00080000 /* start field is alignment */ #define IORESOURCE_MEM_64 0x00100000
#define IORESOURCE_WINDOW 0x00200000 /* forwarded by bridge */
#define IORESOURCE_MUXED 0x00400000 /* Resource is software muxed */ #define IORESOURCE_EXCLUSIVE 0x08000000 /* Userland may not map this resource */
#define IORESOURCE_DISABLED 0x10000000
#define IORESOURCE_UNSET 0x20000000
#define IORESOURCE_AUTO 0x40000000
#define IORESOURCE_BUSY 0x80000000 /* Driver has marked this resource busy */ /* PnP IRQ specific bits (IORESOURCE_BITS) */
#define IORESOURCE_IRQ_HIGHEDGE (1<<0)
#define IORESOURCE_IRQ_LOWEDGE (1<<1)
#define IORESOURCE_IRQ_HIGHLEVEL (1<<2)
#define IORESOURCE_IRQ_LOWLEVEL (1<<3)
#define IORESOURCE_IRQ_SHAREABLE (1<<4)
#define IORESOURCE_IRQ_OPTIONAL (1<<5) /* PnP DMA specific bits (IORESOURCE_BITS) */
#define IORESOURCE_DMA_TYPE_MASK (3<<0)
#define IORESOURCE_DMA_8BIT (0<<0)
#define IORESOURCE_DMA_8AND16BIT (1<<0)
#define IORESOURCE_DMA_16BIT (2<<0) #define IORESOURCE_DMA_MASTER (1<<2)
#define IORESOURCE_DMA_BYTE (1<<3)
#define IORESOURCE_DMA_WORD (1<<4) #define IORESOURCE_DMA_SPEED_MASK (3<<6)
#define IORESOURCE_DMA_COMPATIBLE (0<<6)
#define IORESOURCE_DMA_TYPEA (1<<6)
#define IORESOURCE_DMA_TYPEB (2<<6)
#define IORESOURCE_DMA_TYPEF (3<<6) /* PnP memory I/O specific bits (IORESOURCE_BITS) */
#define IORESOURCE_MEM_WRITEABLE (1<<0) /* dup: IORESOURCE_READONLY */
#define IORESOURCE_MEM_CACHEABLE (1<<1) /* dup: IORESOURCE_CACHEABLE */
#define IORESOURCE_MEM_RANGELENGTH (1<<2) /* dup: IORESOURCE_RANGELENGTH */
#define IORESOURCE_MEM_TYPE_MASK (3<<3)
#define IORESOURCE_MEM_8BIT (0<<3)
#define IORESOURCE_MEM_16BIT (1<<3)
#define IORESOURCE_MEM_8AND16BIT (2<<3)
#define IORESOURCE_MEM_32BIT (3<<3)
#define IORESOURCE_MEM_SHADOWABLE (1<<5) /* dup: IORESOURCE_SHADOWABLE */
#define IORESOURCE_MEM_EXPANSIONROM (1<<6) /* PnP I/O specific bits (IORESOURCE_BITS) */
#define IORESOURCE_IO_16BIT_ADDR (1<<0)
#define IORESOURCE_IO_FIXED (1<<1) /* PCI ROM control bits (IORESOURCE_BITS) */
#define IORESOURCE_ROM_ENABLE (1<<0) /* ROM is enabled, same as PCI_ROM_ADDRESS_ENABLE */
#define IORESOURCE_ROM_SHADOW (1<<1) /* ROM is copy at C000:0 */
#define IORESOURCE_ROM_COPY (1<<2) /* ROM is alloc'd copy, resource field overlaid */
#define IORESOURCE_ROM_BIOS_COPY (1<<3) /* ROM is BIOS copy, resource field overlaid */ /* PCI control bits. Shares IORESOURCE_BITS with above PCI ROM. */
#define IORESOURCE_PCI_FIXED (1<<4) /* Do not move resource */
12.3 设备驱动的分层思想
稍后具体分析1个linux的驱动比较好。
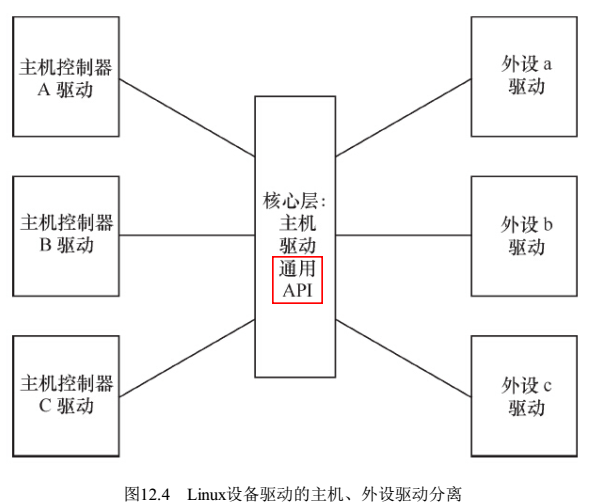
12.4 主机驱动与外设驱动分离的设计思想
核心是定义好外设与主机之间的标准API,两边都使用标准API。具体分析一个驱动,便于理解。
12.5 总结
掌握思想,用这些思想去分析具体驱动,多读读驱动,慢慢就能理解这些思想了。
《linux设备驱动开发详解》笔记——12linux设备驱动的软件架构思想的更多相关文章
- linux设备驱动开发详解 笔记
在目录的 Makefile 中关于 RTC_DRV_S3C 的编译脚本为: obj -$(CONFIG_RTC_DRV_S3C) += rtc-s3c.o 上述脚本意味着如果 RTC_DRV_S3 ...
- Linux设备驱动开发详解
Linux设备驱动开发详解 http://download.csdn.net/detail/wuyouzi067/9581380
- 嵌入式Linux应用程序开发详解------(创建守护进程)
嵌入式Linux应用程序开发详解 华清远见 本文只是阅读文摘. 创建一个守护进程的步骤: 1.创建一个子进程,然后退出父进程: 2.在子进程中使用创建新会话---setsid(): 3.改变当前工作目 ...
- 《linux设备驱动开发详解》笔记——14 linux网络设备驱动
14.1 网络设备驱动结构 网络协议接口层:硬件无关,标准收发函数dev_queue_xmit()和netif_rx(); 注意,netif_rx是将接收到的数据给上层,有时也在驱动收到数据以后调用 ...
- 《linux设备驱动开发详解》笔记——6字符设备驱动
6.1 字符设备驱动结构 先看看字符设备驱动的架构: 6.1.1 cdev cdev结构体是字符设备的核心数据结构,用于描述一个字符设备,cdev定义如下: #include <linux/cd ...
- 《Linux设备驱动开发详解(第2版)》配套视频登录51cto教育频道
http://edu.51cto.com/course/course_id-379-page-1.html http://edu.51cto.com/course/course_id-379-page ...
- Linux设备驱动开发详解-Note(11)--- Linux 文件系统与设备文件系统(3)
Linux 文件系统与设备文件系统(3) 成于坚持,败于止步 sysfs 文件系统与 Linux 设备模型 1.sysfs 文件系统 Linux 2.6 内核引入了 sysfs 文件系统,sysfs ...
- (转)FS_S5PC100平台上Linux Camera驱动开发详解(一) .
平台linuxstructlinux内核videocam 说明: 理解摄像头驱动需要四个前提: 1)摄像头基本的工作原理和S5PC100集成的Camera控制器的工作原理 ...
- (转)FS_S5PC100平台上Linux Camera驱动开发详解(二)
4-3 摄像头的初始化流程及v4l2子设备驱动 这个问题弄清楚了以后下面就来看获得Camera信息以后如何做后续的处理: 在fimc_init_global调用结束之后我们获得了OV9650的信息,之 ...
随机推荐
- 课程增加功能(java web)
1.设计思想 先写类DBUtil用来连接数据库.在UserDaoImpl2类中写在数据库中添加课程表信息的方法.然后定义类Calss2来写保存超级课表数据:课程名称,任课教师,上课地点的属性及其get ...
- (转) cocos 里面scrollView一些方法
void setBounceEnabled (bool enabled)设置当滚动到边界时,是否内部容器发生弹回(bounce)效果 bool isBounceEnabled () const获取边界 ...
- Ubuntu下安装Yarm-PM2
首先打开yarm的官网.https://www.yarnpkg.com/zh-Hant/ (一)yarn的官方安装方法: 1.上通过 Debian 套件安裝 Yarn,粘贴以下命令 curl -sS ...
- ruby 数组array 排序sort 和sort!
1. sort → new_ary click to toggle source sort { |a, b| block } → new_ary Returns a new array created ...
- Java基础:(一)数据类型
一.包装类型 基本类型都有对应的包装类型,基本类型与其对应的包装类型之间的赋值使用自动装箱与拆箱完成. 八个基本类型:boolean/1:byte/8:char/16:short/16:int/32: ...
- Kendo MVVM 数据绑定(十一) Value
Kendo MVVM 数据绑定(十一) Value Value 绑定可以把 ViewModel 的某个属性绑定到 DOM 元素或某个 UI 组件的 Value 属性.当用户修改 DOM 元素或 UI ...
- cocos2d-android-1学习之旅01
学习cocos2d-android-1也大概有半个月了,来整理一下自己的学习心得和提出自己的疑问.之所以不学习非常火的cocos2d-x,转而来学习这个网上学习资料少得可怜的cocos2d-andro ...
- 解决首次在eclipse中使用maven构建hadoop等项目时报Missing artifact sun.jdk:tools:jar:1.5.0的问题
问题原因: eclipse中的maven插件默认没有引用环境变量,所以找不到jdk的路径,也就找不到tool.jar. 解决办法: 步骤如下: 1.关闭eclips 2.在eclipse的解压目录中与 ...
- JavaScript_2_实现
1. HTML中的脚本必须位于<script>与</script>标签之间 JavaScript是所有现代浏览器以及HTML5中的默认脚本语言 2. 脚本可被放置在HTML页面 ...
- 11gR2 新特性: Rebootless Restart
众所周知,当集群出现问题时,例如某个节点丢失网络心跳,或者不能够访问表决盘,或者节点出现了严重的性能问题等,CRS会选择将某个节点的OS 重启,以便保证集群的一致性.当然,大部分的重启都是由CRS的核 ...