磁钉导航差速式AGV控制实验
磁钉导航AGV实验
2016-03
本机器是采用RFID电子地标配合磁钉传感器的定位导航AGV。本AGV已初步实现里程计精确解算,磁钉数据融合,AGV定点精准停车、原地旋转换向、远程无线调度的功能,初步达到协定的第一阶段研发期望效果。

一、 AGV车体物料清单
|
序号 |
物料名称 |
价格(元) |
数量 |
供应商 |
|
1 |
主控板 |
1 |
(arm) |
|
|
2 |
磁导航传感器 |
1 |
自主研发 |
|
|
3 |
电机 |
2 |
德恩科 |
|
|
4 |
电机驱动板 |
2 |
||
|
5 |
RFID射频模块 |
1 |
||
|
6 |
WIFI模块 |
1 |
||
|
7 |
开关电源模块3V3/5V0 |
1 |
||
|
8 |
开关电源模块24V |
2 |
||
|
9 |
底盘 |
1 |
新美星厂制 |
|
|
10 |
电机支架 |
2 |
新美星厂制 |
|
|
11 |
承重轮 |
2 |
(新美星二次加工) |
|
|
12 |
万向轮 |
2 |
||
|
13 |
万向轮支架 |
2 |
新美星厂制 |
|
|
14 |
AGV主控程序 |
1 |
自主研发 |
|
|
总计 |
元 |
另外场地所需物料主要为磁钉、RFID电子标签ID。
|
序号 |
物料名称 |
价格(元) |
数量 |
供应商 |
|
1 |
磁钉 |
# |
||
|
2 |
RFID电子标签ID卡 |
# |
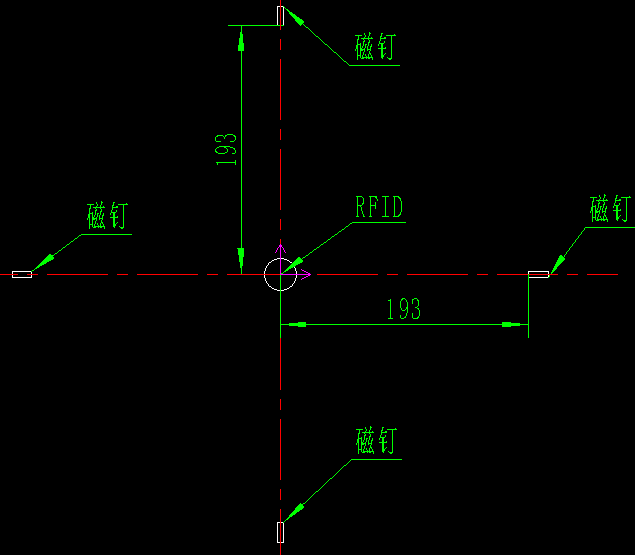
场地铺设磁钉与电子标签共同配合,供AGV定位导航使用,磁钉离原地旋转中心必须193mm,磁钉分NS极,极性保持与实验室一致电子标签铺设于旋转中心,铺设要求如下图:
二、 WIFI指令数据解释
开机后35S机器准备就绪,连接上路由器,调度系统可以与AGV实现数据交换,AGV向调度系统发送当前地标信息,格式为(A-ID=)+(10位卡号),例如:A-ID=0009350943。
测试上位机系统根据协议分别发送调度命令。
|
序号 |
指令 |
描述 |
|
0 |
‘0’ (0x30) |
减速停车 |
|
1 |
‘1’ (0x31) |
原地左转直角 |
|
2 |
‘2’ (0x32) |
原地右转直角 |
|
3 |
‘3’ (0x33) |
加速直行 |
|
4 |
‘4’ (0x34) |
急刹车 |
|
5 |
‘5’ (0x35) |
定点停车 |
原地左转直角,完成后小车自动高速直行向前;
原地右转直角,完成后小车自动高速直行向前;
定点停车,提前一个地标发送定点停车,小车将在下一点精准停车,接受调度指令并存储该条指令,精准定点停车完成后,才会执行下一指令;
三、
AGV参数性能
|
项目 |
描述 |
|
尺寸 |
W*L*H=400*400*X; |
|
载重 |
15KG,稳定运行重量(最大载重待验证) |
|
电池 |
18650锂电池组,预计连续工作6小时以上(待验证) |
|
速度 |
1m/s,稳定运行速度 |
|
行走 |
沿轨道直线行走(一般描述为行走200M无偏差); 原地旋转直角(一般描述为旋转90度3025个脉冲无误差); 定点精准停车(一般描述为停车精度正负5mm以内); |
四、
项目第一阶段总经费
先后共得经费支持*元,先后共花费经费*元。(详见经费管理明细表)
五、
项目第二阶段主要工作
1.
电控板路设计工作
当前电控为手工电路,电路之间经常抗干扰性差,电磁稳定性差,常造成单片机复位失控问题。电控设计工作由我负责,将面条电路(所有模块之间连接使用飞线)整合到一块电路板上,主控原理集成到电路板上,形成AGV控制板,并长期对性能与稳定性负责改进。该项工作初期保守估计用时1个月及经费*元。
该电控板可移植为各种功率直流有刷驱动电机节点型磁钉导航AGV。该电控板也可修改为二维码导航,直流无刷驱动电机等AGV,而不需要修改主控电路。
主控程序具有很强的可移植性,主要依赖于AGV行业控制程序的共通性,方便未来开发高负荷移动AGV。
控制算法:里程计解算(姿态,角速度,线速度),磁钉定位校准,模糊PID,滑膜控制。
2.
AGV车体工业设计
建议AGV车体设计参照模块化思想,可以用于装配不同的移栽结构。
1)
移栽结构设计工作
最好考虑移栽双向性,即双向灵活卸货,结构量轻简洁,模块化装配。
2)
RFID标签注意事项
RFID电子标签可以设置在车底盘偏前,这样利于提前降速定点停车的稳定性。
当前选择的磁钉和RFID标签都在清单中列出。当前RFID标签的读卡速度较慢,使得AGV速度限制在2m/s。
建议选择IC卡,这种卡的读卡速度较快,能达到2m/s以上。
3)
万向轮设置问题
当前万向轮设置在车体中心线上,前后各一个,存在压到磁钉或电子标签的问题,影响RFID读取稳定性,车体行走稳定性,限制速度的提升。
设置4个万向轮,前后各两个,左右对称,避免万向轮与磁钉或电子标签接触,有利于AGV姿态的稳定及速度的提升。
3.
仓库货架机器人
通过观察物流行业动态,货架载重机器人需求很大,市场很好,能研发出一台货架机器人,掌握机器人核心控制和生产技术,因为物流搬运机器人控制技术是通的,只是更换一种应用形式而已。
1)
研发路线
借鉴低载重AGV研发经验,建议货架机器人研发路线为,方案制定、车体结构设计(机械、功能面面俱到、可参考其他厂家)、电控设计(融合机械功能)、程序算法开发调试、AGV工业设计。
经验证明以上研发路线是最合理的,最少走弯路的,最节省时间的,最少麻烦的,产品最快成型成熟的。
另外,借鉴同行经验,车体结构设计建议采用无刷直流电机,工作电压36V或48V,功率根据负载来计算。
关于导航方式,建议开发两种配置供市场选择,一种是二维码导航,一种是磁钉、RFID地标组合导航。
前一种地面较为整洁,市场上接触过的所有都是采用这种方式,智能二维码传感器功能很强,上手开发较为简单,但二维码容易受污染,二维码传感器成本高昂。市场竞争力在于谁做的更稳、更快、更便捷,然后更便宜。
后一种成本低,适用于1.5m/s以下速度的机器人,这一种方案,目前在市场上没见过,且磁钉传感器自主研发,量产在成本上肯定有竞争优势,新美星有过此种导航方式经验,开发有经验技术可复制。
2)
团队建设管理
研发团队建设,要有嵌入式系统工程师角色(硬软件技术啥都成熟),机械工程师角色。
有团队研发目标、团队中有个人研发目标,要有一个人对团队目标负责并接受奖惩,要有合理的研发团队管理、绩效考核、激励、淘汰制度。让人才能通过奖惩激励更直观的看到自己工作的质量,成果收益,能推动并维持人才的工作努力程度和创新热情。
物流机器人属于复杂的嵌入式技术产品,需要研发人员超乎寻常的努力、富有热情的创新研发工作、自愿绞尽脑汁想办法解决问题,才能更好更快的将产品做强。
磁钉导航差速式AGV控制实验的更多相关文章
- CAN-bus接口控制实验
CAN-bus接口控制实验 2016-04-12 20:38:41来源: eefocus 关键字:CAN bus 接口控制 收藏 评论(0) 分享到 微博 QQ 微信 LinkedIn 一.实 ...
- BeagleBone Black板第四课:简单LED控制实验
BBB板第四课:简单LED控制实验 学习BBB板的终于目的是想像单片机一样做控制,但控制思路全然不一样(Linux下控制硬件设备实质就是对相关设备虚拟文件的读写).研究了几天头都大了还是没有进展,网上 ...
- 微型计算机系统实验总结(学习性实验:IO地址译码,可编程并行接口8255,交通灯控制实验 + 自主设计实验:汽车信号灯控制系统,电风扇控制器,洗衣机控制系统,霓虹灯,电梯控制系统)
实验配套软件: https://download.csdn.net/download/qq_39932172/11221584 实验指导用书: 教师版: https://download.csdn.n ...
- 3D网页小实验-基于Babylon.js与recast.js实现RTS式单位控制
一.运行效果 1.建立一幅具有地形起伏和不同地貌纹理的地图: 地图中间为凹陷的河道,两角为突出的高地,高地和低地之间以斜坡通道相连. 水下为沙土材质,沙土材质网格贴合地形,河流材质网格则保持水平. 2 ...
- 单片机与控制实验(5)——重量测量并在LCD12864显示
一.实验目的和要求 掌握点阵式液晶显示屏的原理和控制方法,掌握点阵字符的显示方法.掌握模拟/数字(A/D)转换方式,进一步掌握使用C51语言编写程序的方法,使用C51语言编写实现重量测量的功能. 二. ...
- 单片机与控制实验(2)——LED点阵显示屏
一.实验目的和要求 了解LED点阵显示的基本原理和实现方法.掌握点阵汉字库的编码和从标准字库中提取汉字编码的方法. 二.实验设备 单片机测控实验系统 LED点阵显示器实验模块 Keil开发环境 STC ...
- input输入框外联式样式控制不了字体
1.问题背景 在做项目过程中,发现input输入框利用外联样式,控制不了输入框的样式 2.问题原因 (1)HTML代码 <!DOCTYPE html> <html> <h ...
- 51单片机 | 模拟PWM调制控制实验
———————————————————————————————————————————— PWM(脉冲宽度调制) 对模拟信号电平进行数字编码的方法 - - - - - - - - - - - - - ...
- EXIT(外部中断)控制实验
实验目的 设计使用外接的按键来作为触发源,使得控制器产生中断,并在中断服务函数中实现控制小灯的亮灭. 按键硬件点路 编程要点 初始化用来产生中断的 GPIO: 初始化 EXTI: 配置 NVIC: 编 ...
随机推荐
- Unix domain socket IPC
UNIX Domain socket 虽然网络socket也可用于同一台主机的进程间通讯(通过lo地址127.0.0.1),但是unix domain socket用于IPC更有效率:不需要经过网络协 ...
- springboot日志管理+集成log4j
sprongboot使用的默认日志框架是Logback. 可以在application.properties配置简单日志属性,也可以单独配置logback.xml格式,还可以使用log4j来管理. 下 ...
- Mac下修改应用程序的菜单快捷键!
点击左上角苹果按钮,系统偏好设置 > 键盘 > 快捷键 > 应用快捷键 点击右下角添加按钮,选择chrome程序,输入菜单中文名以及快捷键 1.如何用F5刷新 鼠标悬停在左上角的刷新 ...
- 在XML中用于注释的符号是。(选择1项)
A.<!– –> B.<?– –?> C.<% %> D.<!– –!> 解答:A
- INSERT INTO 语句用于向表格中插入新的行。
语法 INSERT INTO 表名称 VALUES (值1, 值2,....) 我们也可以指定所要插入数据的列: INSERT INTO table_name (列1, 列2,...) VALUES ...
- Leetcode_num4_Reverse Integer
题目: Reverse digits of an integer. Have you thought about this? Here are some good questions to ask b ...
- cx_Freeze的生成可执行文件
①.生成setup.py文件,仿照cx_Freeze给的例子 ②.python setup.py build 生成单个的可执行,会自动带着需要的动态链接库的.默认路径:build\bdist.win3 ...
- TCP通信服务端及客户端代码
Java TCP通信使用的是Socket(客服端)和ServerSocket(服务端),具体代码如下. server端代码: import java.io.BufferedReader; import ...
- Spark源代码阅读笔记之MetadataCleaner
MetadataCleaner执行定时任务周期性的清理元数据(metadata),有6种类型的元数据:MAP_OUTPUT_TRACKER.executor跟踪各个map任务输出的存储位置的数据,依据 ...
- 剑指 offer set 22 数组中的逆序数
总结 1. 题目为归并排序的变形, 不过我完全没想到 2. 在归并排序进行字符组 merge 时, 统计逆序数. merge 后, 两个子数组是有序的了, 下次再 merge 的时候就能以 o(n) ...