视觉SLAM漫淡(二):图优化理论与g2o的使用
视觉SLAM漫谈(二):图优化理论与g2o的使用
1 前言以及回顾
各位朋友,自从上一篇《视觉SLAM漫谈》写成以来已经有一段时间了。我收到几位热心读者的邮件。有的希望我介绍一下当前视觉SLAM程序的实用程度,更多的人希望了解一下前文提到的g2o优化库。因此我另写一篇小文章来专门介绍这个新玩意。
在开始本篇文章正文以前,我们先来回顾一下图优化SLAM问题的提法。至于SLAM更基础的内容,例如SLAM是什么东西等等,请参见上一篇文章。我们直接进入较深层次的讨论。首先,关于我们要做的事情,你可以这样想:
l 已知的东西:传感器数据(图像,点云,惯性测量设备等)。我们的传感器主要是一个Kinect,因此数据就是一个视频序列,说的再详细点就是一个RGB位图序列与一个深度图序列。至于惯性测量设备,可以有也可以没有。
l 待求的东西:机器人的运动轨迹,地图的描述。运动轨迹,画出来应该就像是一条路径。而地图的描述,通常是点云的描述。但是点云描述是否可用于导航、规划等后续问题,还有待研究。
这两个点之间还是有挺长的路要走的。如果我们使用图优化,往往会在整个视频序列中,定义若干个关键帧:
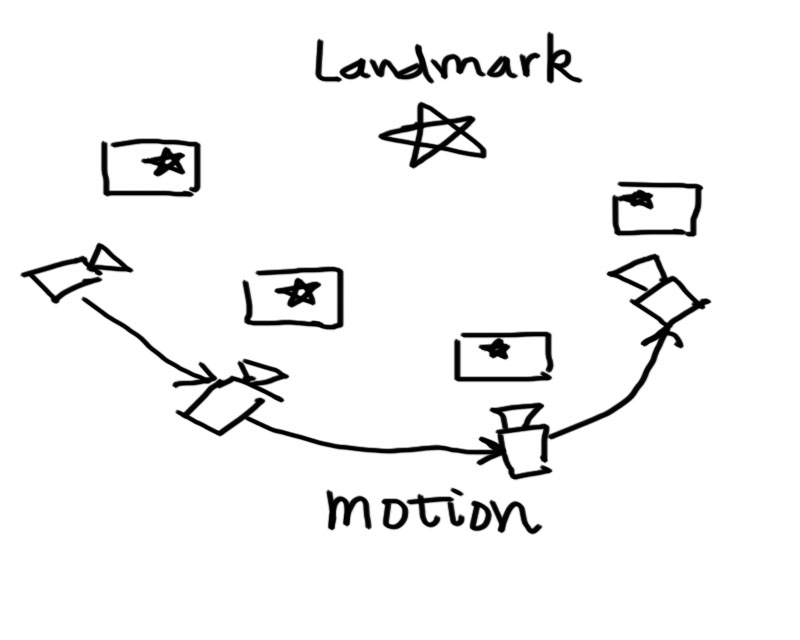
这个图着实画的有点丑,请大家不要吐槽……不管怎么说,它表达出我想表达的意思。在这张图中,我们有一个路标点(五角星),并在各个关键帧中都看到了这个点。于是,我们就能用PnP或ICP求解相邻关键点的运动方向。这些在上篇文章都介绍过了,包括特征选择,匹配及计算等等。那么,这个过程中有什么问题呢?
2 为什么要用全局优化
你一定已经注意到,理想的计算总和实际有差距的。好比说理想的科研就是“看论文——产生想法——做实验——发文章”,那么现实的科研就是“看论文——产生想法——做实验——发现该想法在二十年前就有人做过了”,这样一个过程。实际当中,仅通过帧间运动(ego-motion)来计算机器人轨迹是远远不够的。如下图所示:

如果你只用帧间匹配,那么每一帧的误差将对后面所有的运动轨迹都要产生影响。例如第二帧往右偏了0.1,那么后面第三、四、五帧都要往右偏0.1,还要加上它们自己的估算误差。所以结果就是:当程序跑上十几秒之后早就不知道飞到哪儿去了。这是经典的SLAM现象,在EKF实现中,也会发现,当机器人不断运动时,不确定性会不断增长。当然不是我们所希望的结果。
那么怎么办才好呢?想象你到了一个陌生的城市,安全地走出了火车站,并在附近游荡了一会儿。当你走的越远,看到许多未知的建筑。你就越搞不清楚自己在什么地方。如果是你,你会怎么办?
通常的做法是认准一个标志性建筑物,在它周围转上几圈,弄清楚附近的环境。然后再一点点儿扩大我们走过的范围。在这个过程中,我们会时常回到之前已经见过的场景,因此对它周围的景象就会很熟悉。
机器人的情形也差不多,除了大多数时候是人在遥控它行走。因而我们希望,机器人不要仅和它上一个帧进行比较,而是和更多先前的帧比较,找出其中的相似之处。这就是所谓的回环检测(Loop closure detection)。用下面的示意图来说明:

没有回环时,由于误差对后续帧产生影响,机器人路径估计很不稳定。加上一些局部回环,几个相邻帧就多了一些约束,因而误差就减少了。你可以把它看成一个由弹簧连起来的链条(质点-弹簧模型)。当机器人经过若干时间,回到最初地方时,检测出了大回环时,整个环内的结构都会变得稳定很多。我们就可以籍此知道一个房间是方的还是圆的,面前这堵墙对应着以前哪一堵墙,等等。
相信讲到这里,大家对回环检测都有了一个感性的认识。那么,这件事情具体是怎么建模,怎么计算,怎么编程呢?下面我们就一步步来介绍。
3 图优化的数学模型
SLAM问题的优化模型可以有几种不同的建模方式。我们挑选其中较简单的一种进行介绍,即FrameSLAM,在2008年提出。它的特点是只用位姿约束而不用特征约束,减少了很多计算量,表达起来也比较直观。下面我们给出一种6自由度的3D SLAM建模方法。
符号:

注意到这里的建模与前文有所不同,是一个简化版的模型。因为我们假设帧间匹配时得到了相邻帧的变换矩阵,而不是把所有特征也放到优化问题里面来。所以这个模型看上去相对简单。但是它很实用,因为不用引入特征,所以结点和边的数量大大减少,要知道在图像里提特征动辄成百上千的。
4 g2o是什么
g2o,就是对上述问题的一个求解器。它原理上是一个通用的求解器,并不限定于某些SLAM问题。你可以用它来求SLAM,也可以用ICP, PnP以及其他你能想到的可以用图来表达的优化问题。它的代码很规范,就是有一个缺点:文档太少。唯一的说明文档还有点太装叉(个人感觉)了,有点摆弄作者数学水平的意思,反正那篇文档很难懂就是了。话说程序文档不应该是告诉我怎么用才对么……
言归正传。如果你想用g2o,请去它的github上面下载:https://github.com/RainerKuemmerle/g2o
它的API在:http://www.rock-robotics.org/stable/api/slam/g2o/classg2o_1_1HyperGraph.html
4.1 安装
g2o是一个用cmake管理的C++工程,我是用Linux编译的,所以不要问我怎么在win下面用g2o,因为我也不会……不管怎么说,你下载了它的zip包或者用git拷下来之后,里面有一个README文件。告诉你它的依赖项。在ubuntu下,直接键入命令:
sudo apt-get install cmake libeigen3-dev libsuitesparse-dev libqt4-dev qt4-qmake libqglviewer-qt4-dev
我个人感觉还要 libcsparse-dev和freeglut3这两个库,反正多装了也无所谓。注意libqglviewer-qt4-dev只在ubuntu 12.04库里有,14.04 里换成另一个库了。g2o的可视化工具g2o_viewer是依赖这个库的,所以,如果你在14.04下面编,要么是去把12.04那个deb(以及它的依赖项)找出来装好,要么用ccmake,把build apps一项给去掉,这样就不编译这个工具了。否则编译过不去。
解开zip后,新建一个build文件夹,然后就是:
cmake ..
make
sudo make install
这样g2o就装到了你的/usr/local/lib和/usr/local/include下面。你可以到这两个地方去看它的库文件与头文件。
4.2 学习g2o的使用
因为g2o的文档真的很装叉(不能忍),所以建议你直接看它的源代码,耐心看,应该比文档好懂些。它的example文档夹下有一些示例代码,其中有一个tutorial_slam2d文件夹下有2d slam仿真的一个程序。值得仔细阅读。
使用g2o来实现图优化还是比较容易的。它帮你把节点和边的类型都定义好了,基本上只需使用它内置的类型而不需自己重新定义。要构造一个图,要做以下几件事:
l 定义一个SparseOptimizer. 编写方式参见tutorial_slam2d的声明方式。你还要写明它使用的算法。通常是Gauss-Newton或LM算法。个人觉得后者更好一些。
l 定义你要用到的边、节点的类型。例如我们实现一个3D SLAM。那么就要看它的g2o/types/slam3d下面的头文件。节点头文件都以vertex_开头,而边则以edge_开头。在我们上面的模型中,可以选择vertex_se3作为节点,edge_se3作为边。这两个类型的节点和边的数据都可以直接来自于Eigen::Isometry,即上面讲到过的变换矩阵T。
l 编写一个帧间匹配程序,通过两张图像算出变换矩阵。这个用opencv, pcl都可以做。
l 把你得到的关键帧作为节点,变换矩阵作为边,加入到optimizer中。同时设定节点的估计值(如果没有惯性测量就设成零)与边的约束(变换矩阵)。此外,每条边还需设定一个信息矩阵(协方差矩阵之逆)作为不确定性的度量。例如你觉得帧间匹配精度在0.1m,那么把信息矩阵设成100的对角阵即可。
l 在程序运行过程中不断作帧间检测,维护你的图。
l 程序结束时调用optimizer.optimize( steps )进行优化。优化完毕后读取每个节点的估计值,此时就是优化后的机器人轨迹。
代码这种东西展开来说会变得像字典一样枯燥,所以具体的东西需要大家自己去看,自己去体会。这里有我自己写的一个程序,可以供大家参考。不过这个程序需要带着数据集才能跑,学习g2o的同学只需参考里面代码的写法即可:https://github.com/gaoxiang12/slam3d_gx
5 效果
最近我跑了几个公开数据集(http://vision.in.tum.de/data/datasets/rgbd-dataset)上的例子(fr1_desk, fr2_slam)(,感觉效果还不错。有些数据集还是挺难的。最后一张图是g2o_viewer,可以看到那些关键路径点与边的样子。



以上,如有什么问题,欢迎与我交流:gaoxiang12@mails.tsinghua.edu.cn
视觉SLAM漫淡(二):图优化理论与g2o的使用的更多相关文章
- 高翔《视觉SLAM十四讲》从理论到实践
目录 第1讲 前言:本书讲什么:如何使用本书: 第2讲 初始SLAM:引子-小萝卜的例子:经典视觉SLAM框架:SLAM问题的数学表述:实践-编程基础: 第3讲 三维空间刚体运动 旋转矩阵:实践-Ei ...
- 视觉SLAM漫淡
视觉SLAM漫谈 1. 前言 开始做SLAM(机器人同时定位与建图)研究已经近一年了.从一年级开始对这个方向产生兴趣,到现在为止,也算是对这个领域有了大致的了解.然而越了解,越觉得这个方向难度很 ...
- 浅读《视觉SLAM十四讲:从理论到实践》--操作1--初识SLAM
下载<视觉SLAM十四讲:从理论到实践>源码:https://github.com/gaoxiang12/slambook 第二讲:初识SLAM 2.4.2 Hello SLAM(书本P2 ...
- 视觉SLAM十四讲:从理论到实践 两版 PDF和源码
视觉SLAM十四讲:从理论到实践 第一版电子版PDF 链接:https://pan.baidu.com/s/1SuuSpavo_fj7xqTYtgHBfw提取码:lr4t 源码github链接:htt ...
- SLAM中的优化理论(一)—— 线性最小二乘
最近想写一篇系列博客比较系统的解释一下 SLAM 中运用到的优化理论相关内容,包括线性最小二乘.非线性最小二乘.最小二乘工具的使用.最大似然与最小二 乘的关系以及矩阵的稀疏性等内容.一方面是督促自己对 ...
- 从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
首发于公众号:计算机视觉life 旗下知识星球「从零开始学习SLAM」 这可能是最清晰讲解g2o代码框架的文章 理解图优化,一步步带你看懂g2o框架 小白:师兄师兄,最近我在看SLAM的优化算法,有种 ...
- SLAM图优化g2o
SLAM图优化g2o 图优化g2o框架 图优化的英文是 graph optimization 或者 graph-based optimization, "图"其实是数据结构中的gr ...
- 深入理解图优化与g2o:图优化篇
前言 本节我们将深入介绍视觉slam中的主流优化方法——图优化(graph-based optimization).下一节中,介绍一下非常流行的图优化库:g2o. 关于g2o,我13年写过一个文档,然 ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
随机推荐
- java代码--------构造方法的调用
总结: package com.sads; //构造方法何时被调用, //构造方法里的内容先执行 public class Sdw { static { System.out.println(&quo ...
- 杂项-Server:Serv-U
ylbtech-杂项-Server:Serv-U Serv-U FTP Server,是一种被广泛运用的FTP服务器端软件,支持3x/9x/ME/NT/2K等全Windows系列.可以设定多个FTP服 ...
- python3第一次作业
需要一个文件users,里面有用户名密码以及是否锁定的标识符 lzd--123--1wdl--123--0lw--123--0aaa--123--0bbb--123--0ccc--123--1ddd- ...
- UE4 代码总结
1.创建关卡类 1.创建C++类继承LevelScriptActor 2.打开关卡蓝图 Class Settings->Parent Class 选择你之前创建好的C++类 遇到的问题: 1.T ...
- linux文件权限,用户和组
文件权限 默认权限分配 umask umask是通过八进制的数值来定义用户创建文件或目录的默认权限的 安全权限的临界点是,文件默认权限是644,目录默认权限是755 [root@Poppy joker ...
- 【转】WebAPI使用多个xml文件生成帮助文档
来自:http://www.it165.net/pro/html/201505/42504.html 一.前言 上篇有提到在WebAPI项目内,通过在Nuget里安装(Microsoft.AspNet ...
- js内置对象中获取时间的用法--通过date对象获取。
Date对象: var today = new Date(); //年份: var year = today.getFullYear(); //月份 var month = today.getMont ...
- Druid.io系列(六):问题总结
原文地址: https://blog.csdn.net/njpjsoftdev/article/details/52956508 我们在生产环境中使用Druid也遇到了很多问题,通过阅读官网文档.源码 ...
- nodeJS的了解
JavaScript不仅仅只能运行在浏览器中.任何有JS运行环境(runtime)的地方就可以运行JavaScript. Node.js对Google V8进行了封装. 有了Node.js,JavaS ...
- leetcode674
public class Solution { public int FindLengthOfLCIS(int[] nums) { var len = nums.Length; ) { return ...