OpenCV使用FLANN进行特征点匹配
使用FLANN进行特征点匹配
目标
在本教程中我们将涉及以下内容:
- 使用 FlannBasedMatcher 接口以及函数 FLANN 实现快速高效匹配( 快速最近邻逼近搜索函数库(Fast Approximate Nearest Neighbor Search Library) )
理论
代码
这个教程的源代码如下所示。你还可以从 以下链接下载得到源代码
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp" using namespace cv; void readme(); /** @function main */
int main( int argc, char** argv )
{
if( argc != 3 )
{ readme(); return -1; } Mat img_1 = imread( argv[1], CV_LOAD_IMAGE_GRAYSCALE );
Mat img_2 = imread( argv[2], CV_LOAD_IMAGE_GRAYSCALE ); if( !img_1.data || !img_2.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; } //-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400; SurfFeatureDetector detector( minHessian ); std::vector<KeyPoint> keypoints_1, keypoints_2; detector.detect( img_1, keypoints_1 );
detector.detect( img_2, keypoints_2 ); //-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor; Mat descriptors_1, descriptors_2; extractor.compute( img_1, keypoints_1, descriptors_1 );
extractor.compute( img_2, keypoints_2, descriptors_2 ); //-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches ); double max_dist = 0; double min_dist = 100; //-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_1.rows; i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
} printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist ); //-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist )
//-- PS.- radiusMatch can also be used here.
std::vector< DMatch > good_matches; for( int i = 0; i < descriptors_1.rows; i++ )
{ if( matches[i].distance < 2*min_dist )
{ good_matches.push_back( matches[i]); }
} //-- Draw only "good" matches
Mat img_matches;
drawMatches( img_1, keypoints_1, img_2, keypoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS ); //-- Show detected matches
imshow( "Good Matches", img_matches ); for( int i = 0; i < good_matches.size(); i++ )
{ printf( "-- Good Match [%d] Keypoint 1: %d -- Keypoint 2: %d \n", i, good_matches[i].queryIdx, good_matches[i].trainIdx ); } waitKey(0); return 0;
} /** @function readme */
void readme()
{ std::cout << " Usage: ./SURF_FlannMatcher <img1> <img2>" << std::endl; }
解释
结果
这里是第一张图特征点检测结果:
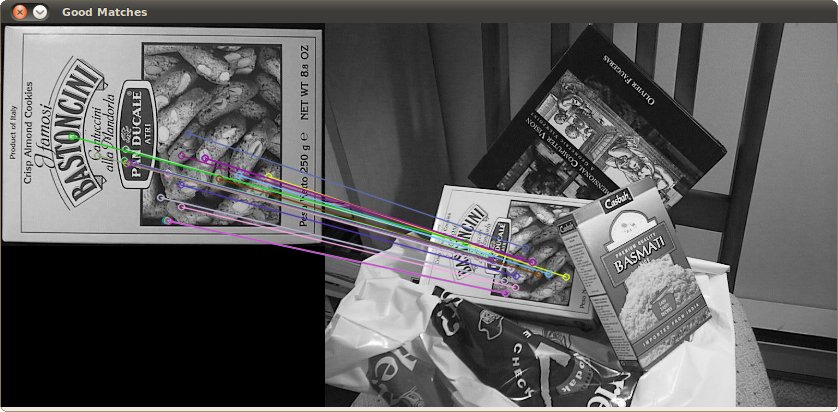
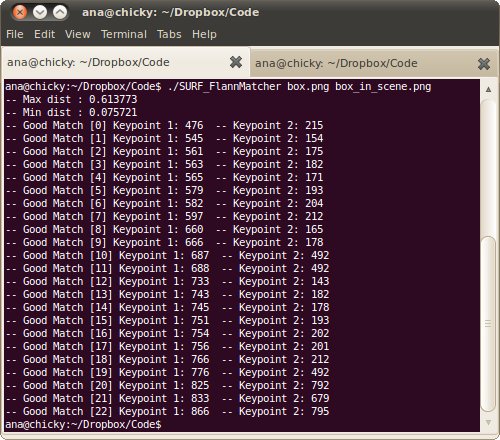
此外我们通过控制台输出FLANN匹配关键点结果:
翻译者
Shuai Zheng, <kylezheng04@gmail.com>, http://www.cbsr.ia.ac.cn/users/szheng/
from: http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/features2d/feature_flann_matcher/feature_flann_matcher.html#feature-flann-matcher
OpenCV使用FLANN进行特征点匹配的更多相关文章
- OpenCV 使用FLANN进行特征点匹配
#include <stdio.h> #include <iostream> #include "opencv2/core/core.hpp" #inclu ...
- 《opencv学习》 之 特征检测与匹配
这几天学习SURF特征检测,直接看的视频和书本有点吃不消,现在是基本看懂了,如果写博客记录没有必要,因为网上都差不多,笔记都在书上了,以下是个人认为比较浅显易懂的文章,当然海有很多好文章我没看到. 看 ...
- sift、surf、orb 特征提取及最优特征点匹配
目录 sift sift特征简介 sift特征提取步骤 surf surf特征简介 surf特征提取步骤 orb orb特征简介 orb特征提取算法 代码实现 特征提取 特征匹配 附录 sift si ...
- Opencv中使用Surf特征实现图像配准及对透视变换矩阵H的平移修正
图像配准需要将一张测试图片按照第二张基准图片的尺寸.角度等形态信息进行透视(仿射)变换匹配,本例通过Surf特征的定位和匹配实现图像配准. 配准流程: 1. 提取两幅图像的Surf特征 2. 对Sur ...
- Opencv Sift和Surf特征实现图像无缝拼接生成全景图像
Sift和Surf算法实现两幅图像拼接的过程是一样的,主要分为4大部分: 1. 特征点提取和描述 2. 特征点配对,找到两幅图像中匹配点的位置 3. 通过配对点,生成变换矩阵,并对图像1应用变换矩阵生 ...
- 第二篇 特征点匹配以及openvslam中的相关实现详解
配置文件 在进入正题之前先做一些铺垫,在openvslam中,配置文件是必须要正确的以.yaml格式提供,通常需要指明使用的相机模型,ORB特征检测参数,跟踪参数等. #==============# ...
- 【macOS】 在OpenCV下训练Haar特征分类器
本教程基于以下环境 macOS 10.12.6,OpenCV 3.3.0,python 3.6.由于网上基于masOS系统的教程太少,想出一篇相关教程造福大家-本文旨在学习如何在opencv中基于ha ...
- OpenCV教程(47) sift特征和surf特征
在前面三篇教程中的几种角检测方法,比如harris角检测,都是旋转无关的,即使我们转动图像,依然能检测出角的位置,但是图像缩放后,harris角检测可能会失效,比如下面的图像,图像放大之前可 ...
- opencv surf特征点匹配拼接源码
http://blog.csdn.net/huixingshao/article/details/42672073 /** * @file SURF_Homography * @brief SURF ...
随机推荐
- 关于HTML5 boilerplate 的一些笔记
最近在研究HTML5 boilerplate的模版,以此为线索可以有条理地学习一些前端的best practice,好过在W3C的文档汪洋里大海捞针……啊哈哈哈…… 开头的IE探测与no-js类是什么 ...
- 【PAT】1014. 福尔摩斯的约会 (20)
1014. 福尔摩斯的约会 (20) 大侦探福尔摩斯接到一张奇怪的字条:“我们约会吧! 3485djDkxh4hhGE 2984akDfkkkkggEdsb s&hgsfdk d&Hy ...
- HashMap在Java1.7与1.8中的区别
基于JDK1.7.0_80与JDK1.8.0_66做的分析 JDK1.7中 使用一个Entry数组来存储数据,用key的hashcode取模来决定key会被放到数组里的位置,如果hashcode相同, ...
- 在linux通过kubeadm搭建kubernetes群集
kubeadm是一个命令行的工具,它简化了创建和管理kubernetes cluster的步骤.kubeadm利用Docker的功能进行快速的部署,支行kubernetes master和etcd服务 ...
- 很好的开源UI框架Chico UI
介绍一个很好的开源的UI框架,依赖于jquery 官网:http://www.chico-ui.com.ar/ 以下是相关截图: 消息提示 自动完成 分页,列表 Chico UI是什么? Chico ...
- [GYM 100492A] Average Convex Hull 凸包好题
大致题意: 给出一个点集,其中有一个点有相同的几率会被删除,求删除之后的点集够成的凸包上的点的平均数. 首先看到题目,可以考虑枚举删除的点,将其凸包上前后两点以及两点间凸包内所有点构建凸包,因为凸包内 ...
- linux常用解压命令总结
.xz 解压: tar xvf FileName.tar.xz 打包: tar cvf FileName.tar DirName .tar 解包:tar xvf FileName.tar 打包:tar ...
- 工厂bean和bean工厂
FactoryBean(工厂bean):是bean的加工工厂,是对已知Bean的加工,是一个接口,要实现三个方法: ① Object getObject()可以对bean进行加工添加功能. ② Cla ...
- 「CSA49」Bunny on Number Line
「CSA49」Bunny on Number Line 题目大意:有一个人从0开始走,每次可以向前走一步或者回到1,那么会产生一个位置序列,其中给出 \(k\) 个位置是好的.定义一个位置序列是好的, ...
- JZYZOJ1311 邮局设置问题 dp
易得每两个点之间建立邮局的最好位置为两点最中间的点,两点之间如果没有奇数个数的点则中间两个点都可以...(自己画一下图可以看出随着右边点的增大最佳点的增大非常平滑...强迫症一本满足) w[i][ ...